DIY drone balap FPV (bagian 1) - perakitan
Saat ini, popularitas balapan di pesawat tanpa awak tumbuh dengan cepat. Selebaran amatir berkembang menjadi kompetisi internasional yang serius, dan jumlah orang yang terlibat dalam hobi ini semakin berkembang. Saya sendiri baru-baru ini membuat quadrocopter FPV ukuran 180 (jarak dalam mm antara sumbu motor secara diagonal) dan saya segera berbagi pengalaman ini. Saya menjelaskan seluruh proses perakitan dan konfigurasi di sini dan di sini , dan di bawah ini adalah versi yang sedikit dimodifikasi yang berisi lebih banyak informasi dari artikel saya sebelumnya.Saya akan meninggalkan pertanyaan tentang bergabung dengan hobi ini dan langsung pergi ke quadrocopter.
Saya menjelaskan seluruh proses perakitan dan konfigurasi di sini dan di sini , dan di bawah ini adalah versi yang sedikit dimodifikasi yang berisi lebih banyak informasi dari artikel saya sebelumnya.Saya akan meninggalkan pertanyaan tentang bergabung dengan hobi ini dan langsung pergi ke quadrocopter.Pilihan ukuran quadcopter
Setahun yang lalu, quadrocopters ukuran 250 adalah yang paling populer. Tapi sekarang, pilot lebih suka merakit perangkat yang lebih kecil, yang sangat masuk akal: beratnya kurang, tetapi kekuatannya sama. Saya memilih ukuran ke-180 bukan karena alasan praktis, tetapi sebagai semacam tantangan perakitan.Faktanya, pendekatan pemilihan ini tidak sepenuhnya benar. Jauh lebih bijak untuk memilih ukuran baling-baling pertama, dan sudah di bawah mereka - bingkai terkecil di mana baling-baling yang dipilih akan cocok. Dan dengan pendekatan ini, format ke-180 umumnya ditolak. Nilai sendiri: format 210 memungkinkan Anda menempatkan baling-baling 5-inci yang sama dengan baling-baling 250, sedangkan quadric itu sendiri lebih mudah, dan baling-baling 4-inci masuk ke dalam frame 160. Ternyata ukuran ke-180 adalah format perantara, yang "bukan milik kita atau milikmu." Ini juga dapat dianggap sebagai bobot 160. Tetapi, bagaimanapun, saya memilihnya. Mungkin karena ini adalah ukuran minimum yang dapat lebih atau kurang menarik kamera GoPro atau Runcam.Aksesoris
Mari kita mulai dengan motornya. The "perantara" dari ukuran 180, serta kekayaan bermacam-macam mereka, mempersulit pilihan. Di satu sisi, Anda dapat mengambil apa yang terjadi pada 160, di sisi lain, apa yang diinstal pada 210 atau bahkan 250. Perlu untuk melanjutkan dari baling-baling dan baterai (jumlah kaleng). Saya tidak melihat alasan untuk menggunakan baterai 3S, dan untuk baling-baling aturan umumnya adalah sebagai berikut:- membutuhkan daya dorong statis maksimum - tambah diameter baling-baling dan kurangi pitch (dalam batas wajar)
- perlu kecepatan tinggi - kurangi diameter dan tambah langkah (dalam batas yang wajar)
- Anda memerlukan tusukan tinggi dengan diameter kecil - tambahkan jumlah bilah (sekali lagi dalam batas yang wajar, karena jika perbedaan antara baling-baling dua dan tiga bilah teraba, maka antara baling-baling tiga dan empat bilah itu tidak terlalu besar)
Dalam kasus saya, saya memiliki batas ukuran baling-baling 4 inci, tetapi saya tidak memiliki batas motor. Jadi, paling masuk akal untuk menggunakan 2.545 baling-baling bullnose berbilah tiga. Mereka sulit untuk diseimbangkan, tetapi dengan mereka kontrol lebih responsif dan dapat diprediksi, dan suaranya lebih tenang. Di sisi lain, dengan baling-baling berbilah dua, kecepatan quadrocopter lebih tinggi, tetapi saya jelas tidak membutuhkan ini. "Populer" pada 180-an pengaturan berikut berlaku:- ringan dengan motor 1306-3100KV, baling-baling 4045 konvensional dan baterai 850mAh
- berat dan kuat untuk baling-baling bilah tiga berbilah dan kamera aksi dengan motor 2205-2600KV dan baterai 1300mAh
Bahkan, bingkai memungkinkan Anda untuk menempatkan motor dari 1306-4000KV ke 22XX-2700KV. Ngomong-ngomong, saya tidak tahu mengapa, tetapi motor 1806-2300KV sekarang dalam keadaan memalukan dan jarang digunakan.Saya mengambil motor untuk quadric saya - RCX H2205 2633KV . Pertama, saya ingin memiliki margin kekuasaan (walaupun dengan keterampilan piloting sederhana saya, tidak jelas mengapa). Kedua, pengaturan saya tidak pernah menjadi super-ringan, selain itu saya juga berencana untuk membawa kamera aksi. Secara khusus, motor RCX adalah opsi kompromi. Mereka murah, tetapi ada banyak keluhan tentang kualitas. Pada saat pembelian komponen, ini adalah salah satu dari sedikit motor 2205-2600KV di pasar. Sekarang (pada saat penulisan), kisarannya jauh lebih besar dan lebih baik untuk memilih sesuatu yang lain.Dengan komponen-komponen lainnya, ia bertindak berdasarkan prinsip "lebih banyak tantangan":- RC180 V2. ( 2-3 ), , 3. , , , , 1-2 .
- FrSky D4R-II. FrSky X4R-SB, , . , . .
- FVT LittleBee 20A — , . - FVT LittleBee 20A PRO Silabs F396 ( , Silabs F330), FVT LittleBee 20A-S, BLHeli_S. LittleBee 20A.
- Foxeer FX799T — , .
- Sony Super HAD CCD 600TVL (IR Block, NTSC, 2.8). Foxeer XAT600M, .
- Diatone.
- -«» BeeRotor -.
- MICRO MinimOSD.
- , . Matek Mini Power Hub, . , 3S, PBD .
- Turnigy nano-tech 1300mAh 4S 45~90C.
- ZG 12Bit WS2812B LED Board. , , - ( ) . .
- DYS 3-blade 4040 Bullnose.
Pemilihan pengontrol penerbangan
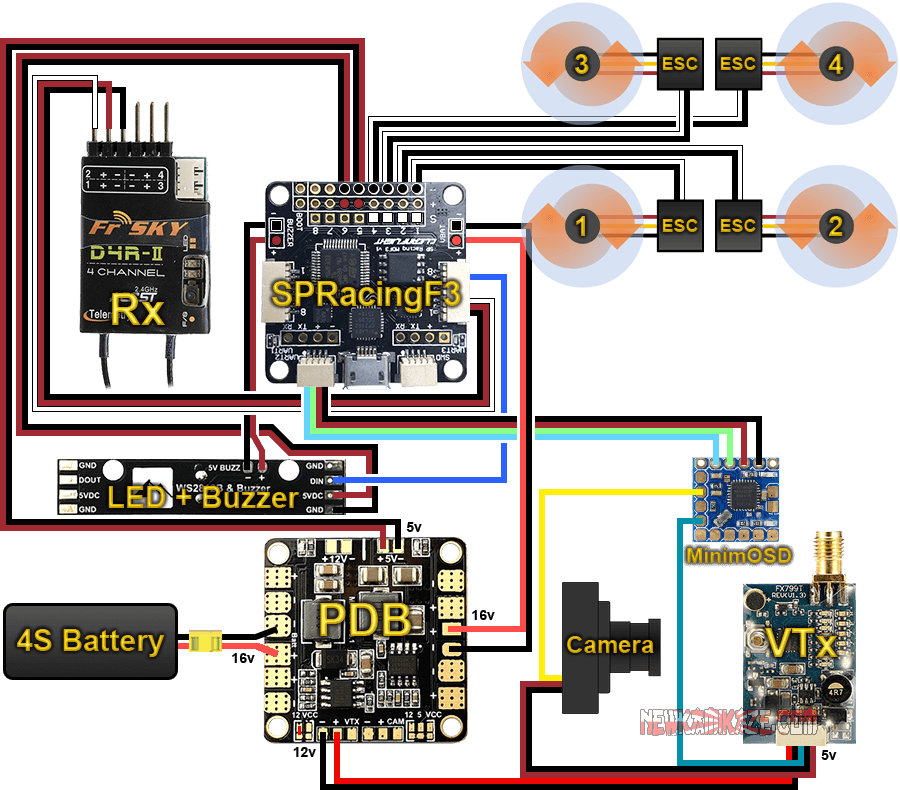
Anda mungkin memperhatikan bahwa tidak ada pengendali penerbangan dalam daftar. Saya ingin menggambarkan pilihannya lebih terinci. Kit bangunan berbiaya rendah sering menyertakan pengendali CC3D, jadi sekarang ini mungkin PC termurah. Hari ini, sama sekali tidak ada gunanya membeli CC3D. Itu sudah ketinggalan zaman dan tidak memiliki hal-hal yang diperlukan seperti pemantauan baterai dan "tweeter". Penggantinya, CC3D Revolution, adalah produk yang sama sekali berbeda dengan fitur yang kaya, tetapi juga dihargai lebih dari 40 €.Pengontrol penerbangan modern telah beralih dari prosesor F1 ke F3, yang membuat PC Naze32 generasi terakhir dan secara signifikan mengurangi harganya. Sekarang ini benar-benar pengendali rakyat yang memiliki hampir semua yang diinginkan jiwa dengan harga 12 € atau lebih.Dari generasi PC baru, Serius Pro Racing F3 adalah yang paling populer, dan pertama-tama, karena ketersediaan klon yang murah. Kontroler itu sendiri sama sekali tidak kalah dengan Naze32, selain itu, ia memiliki prosesor F3 cepat, sejumlah besar memori, tiga port UART, dan sebuah inverter untuk S.Bus. Ini SPRacingF3 Acro saya memilih. Sisa dari PC modern tidak dianggap karena harga, atau beberapa fitur tertentu (firmware tertutup, tata letak, dll.)Saya akan secara terpisah mencatat kecenderungan modis saat ini untuk menggabungkan beberapa papan menjadi satu. Paling sering, PC dan OSD atau PC dan PDB I tidak mendukung ide ini dengan beberapa pengecualian. Saya tidak ingin mengubah seluruh pengontrol penerbangan karena OSD yang terbakar. Selain itu, seperti yang ditunjukkan oleh praktik, terkadang persatuan seperti itu membawa masalah .Diagram pengkabelan
Jelas bahwa semua komponen yang membutuhkan daya 5V atau 12V akan menerimanya dari BEC pada papan distribusi daya. Kamera secara teoritis dapat diberdayakan langsung dari baterai 4S, karena tegangan input memungkinkan ini, tetapi dalam hal ini tidak boleh dilakukan. Pertama, semua kamera sangat rentan terhadap gangguan di sirkuit dari regulator, yang akan mengakibatkan gangguan pada gambar. Kedua, regulator dengan pengereman aktif (seperti LittleBee saya), ketika pengereman ini diaktifkan, memberikan dorongan yang sangat serius ke jaringan on-board, yang dapat membakar kamera. Selain itu, keberadaan pulsa secara langsung tergantung pada keausan baterai. Yang baru tidak, tetapi yang lama. Berikut ini adalah video yang informatif tentang gangguan dari regulator dan cara memfilternya. Jadi lebih baik memberi daya kamera baik dari BEC, atau dari pemancar video.Selain itu, untuk meningkatkan kualitas gambar, disarankan untuk menggunakan tidak hanya kawat sinyal dari kamera pada OSD, tetapi juga ground. Jika Anda memutar kabel ini menjadi "kuncir", maka "bumi" bertindak sebagai layar untuk kabel sinyal. Benar, dalam hal ini, saya tidak melakukannya.Jika kita sudah berbicara tentang "ground", sering diperdebatkan tentang apakah menghubungkan "ground" dari regulator ke PC atau hanya satu kabel sinyal. Pada quadrocopter balap konvensional, Anda harus terhubung. Ketidakhadirannya dapat menyebabkan kegagalan sinkronisasi ( konfirmasi ).Diagram pengkabelan terakhir ternyata sederhana dan ringkas, tetapi dengan beberapa nuansa:- pasokan flight controller (5V) dari PDB melalui output untuk regulator
- daya ke radio (5V) dari PC melalui konektor OI_1
- catu daya pemancar video (12V) dari PDB
- kekuatan kamera (5V) dari pemancar video
- OSD terhubung ke UART2. Banyak orang menggunakan UART1 untuk ini, tetapi seperti pada Naze32, di sini konektor ini sejajar dengan USB.
- Vbat terhubung ke PC, bukan ke OSD. Secara teori, pembacaan tegangan baterai (vbat) dapat dibaca pada OSD dan PC, dengan menghubungkan baterai ke salah satu atau yang lainnya. Apa bedanya? Dalam kasus pertama, bacaan akan hadir hanya pada layar monitor atau kacamata dan PC tidak akan tahu apa-apa tentang mereka. Dalam kasus kedua, PC dapat memonitor tegangan baterai, menginformasikan pilot tentang hal itu (misalnya, "squeaker"), dan juga mentransfer data ini ke OSD, ke "kotak hitam" dan dengan telemetri ke remote control. Menyesuaikan akurasi pembacaan juga lebih mudah melalui PC. Artinya, menghubungkan vbat ke pengontrol penerbangan jauh lebih disukai.
Majelis
Untuk memulai, berikut adalah beberapa kiat perakitan umum:- . , .
- , , , . , , . , .
- PLASTIK 71, . , , .
- . .
- «» ().
Saya lebih suka memulai perakitan dengan motor dan regulator. Berikut adalah video yang bagus tentang perakitan quadrocopter kecil, dari mana saya mengadopsi gagasan mengatur kabel motor.Saya juga ingin mengatakan tentang pemasangan regulator: di mana dan dengan apa? Mereka dapat diperbaiki pada dan di bawah sinar. Saya memilih opsi pertama, karena bagi saya tampaknya dalam posisi ini regulator lebih terlindungi (ini adalah spekulasi saya, tidak dikonfirmasi oleh praktik). Selain itu, ketika dipasang pada balok, regulator didinginkan sempurna oleh udara dari baling-baling. Sekarang tentang cara memperbaiki regulator. Ada banyak cara, yang paling populer - double tape + satu atau dua screed. "Murah dan ceria", selain itu, membongkar kesulitan tidak akan menyebabkan. Lebih buruk lagi, dengan pengikat seperti itu, Anda dapat merusak papan regulator (jika Anda memasang coupler di atasnya) atau kabel (jika Anda mengikatnya). Jadi saya memutuskan untuk mengikat regulator dengan tabung panas menyusut (25mm) dan menyoldernya bersama dengan balok. Ada satu peringatan: regulator itu sendiri juga harus dalam panas menyusut (milik saya dijual di dalamnya),agar tidak bersentuhan dengan serat karbon balok, jika tidak - korsleting. Masuk akal juga untuk menempelkan selembar pita dua sisi dari bawah pada setiap balok di dudukan motor. Pertama, itu akan melindungi bantalan motor dari debu. Kedua, jika karena alasan tertentu salah satu baut terlepas, tidak akan jatuh selama penerbangan dan tidak akan hilang.Ketika merakit bingkai, saya tidak menggunakan baut tunggal dari kit, karena mereka semua pendek tidak senonoh. Sebaliknya, saya mendapat sedikit lebih lama dan dengan kepala untuk obeng Phillips (ada preferensi pribadi seperti itu).Kamera tidak sesuai dengan lebar antara pelat sisi bingkai. Perlahan-lahan mengolah tepi papannya dengan file (lebih cenderung menggiling kasar) dan dia bangun tanpa masalah. Tetapi kesulitan tidak berakhir di sana. Saya benar-benar menyukai kualitas dudukan untuk kamera dari Diatone, tetapi kamera yang dengannya tidak pas dengan bingkai tingginya (sekitar 8-10 mm). Pertama, saya menyematkan dudukan di sisi luar (atas) piring melalui peredam neoprene, tetapi desainnya ternyata tidak dapat diandalkan. Kemudian muncul ide pengancing yang paling sederhana dan andal. Saya hanya mengambil penjepit dari dudukan Diatone dan menaruhnya di sepotong batang dengan benang M3. Untuk mencegah kamera bergerak ke samping, saya memperbaiki penjepit dengan kopling nilon.
Masuk akal juga untuk menempelkan selembar pita dua sisi dari bawah pada setiap balok di dudukan motor. Pertama, itu akan melindungi bantalan motor dari debu. Kedua, jika karena alasan tertentu salah satu baut terlepas, tidak akan jatuh selama penerbangan dan tidak akan hilang.Ketika merakit bingkai, saya tidak menggunakan baut tunggal dari kit, karena mereka semua pendek tidak senonoh. Sebaliknya, saya mendapat sedikit lebih lama dan dengan kepala untuk obeng Phillips (ada preferensi pribadi seperti itu).Kamera tidak sesuai dengan lebar antara pelat sisi bingkai. Perlahan-lahan mengolah tepi papannya dengan file (lebih cenderung menggiling kasar) dan dia bangun tanpa masalah. Tetapi kesulitan tidak berakhir di sana. Saya benar-benar menyukai kualitas dudukan untuk kamera dari Diatone, tetapi kamera yang dengannya tidak pas dengan bingkai tingginya (sekitar 8-10 mm). Pertama, saya menyematkan dudukan di sisi luar (atas) piring melalui peredam neoprene, tetapi desainnya ternyata tidak dapat diandalkan. Kemudian muncul ide pengancing yang paling sederhana dan andal. Saya hanya mengambil penjepit dari dudukan Diatone dan menaruhnya di sepotong batang dengan benang M3. Untuk mencegah kamera bergerak ke samping, saya memperbaiki penjepit dengan kopling nilon.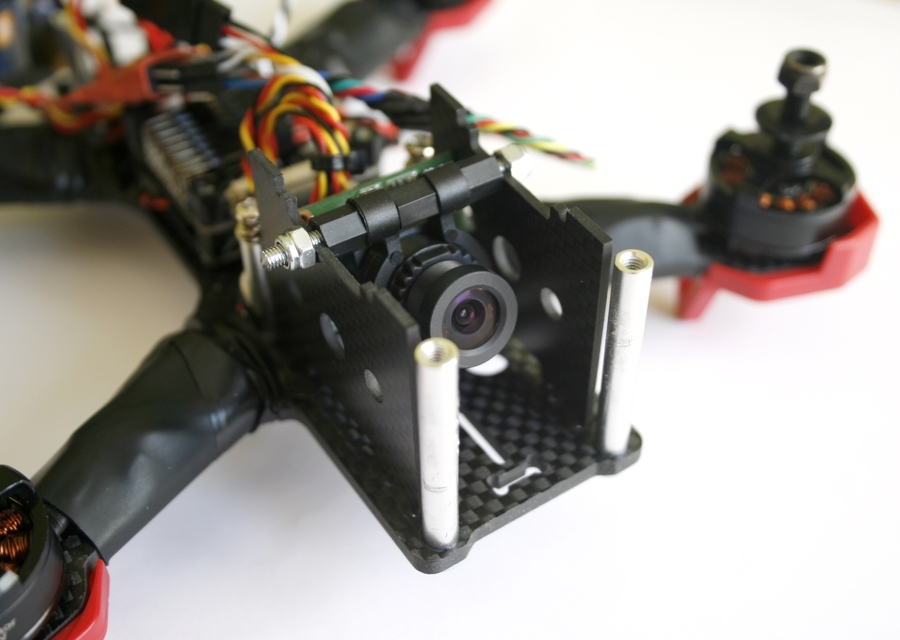 Saya sangat menyukai bahwa hanya konektor untuk regulator yang harus disolder dari konektor pada PC. Konektor tiga pin penuh tidak sesuai dengan tinggi saya, saya harus pergi ke trik dan menggunakan yang dua pin. Untuk lima saluran pertama (4 untuk regulator + 1 "untuk setiap pemadam kebakaran") saya menyolder konektor ke bantalan sinyal dan "ground", untuk tiga lainnya - ke "plus" dan "ground" sehingga PC itu sendiri dapat diaktifkan dan sudah dari itu - lampu latar. Mengingat bahwa klon pengontrol penerbangan China berdosa oleh fiksasi konektor USB yang tidak dapat diandalkan, saya juga menyoldernya. Karakteristik titik lain dari klon SPRacingF3 adalah konektor tweeter. Seperti dalam kasus vbat, di sisi atas papan ada konektor JST-XH dua-pin, dan di sisi bawah itu diduplikasi oleh bantalan kontak. Caranya adalahbahwa klon "pembumian" pada konektor adalah konstan dan ketika digunakan, "tweeter" akan selalu diaktifkan. Normal yang berfungsi untuk "tweeter" "earth" hanya ditampilkan di papan kontak. Ini mudah diperiksa oleh tester: "plus" dari konektor memanggil dengan "plus" pada pad kontak, dan "minus" - tidak memanggil. Karena itu, Anda perlu menyolder kabel untuk "tweeter" ke bagian bawah PC.
Saya sangat menyukai bahwa hanya konektor untuk regulator yang harus disolder dari konektor pada PC. Konektor tiga pin penuh tidak sesuai dengan tinggi saya, saya harus pergi ke trik dan menggunakan yang dua pin. Untuk lima saluran pertama (4 untuk regulator + 1 "untuk setiap pemadam kebakaran") saya menyolder konektor ke bantalan sinyal dan "ground", untuk tiga lainnya - ke "plus" dan "ground" sehingga PC itu sendiri dapat diaktifkan dan sudah dari itu - lampu latar. Mengingat bahwa klon pengontrol penerbangan China berdosa oleh fiksasi konektor USB yang tidak dapat diandalkan, saya juga menyoldernya. Karakteristik titik lain dari klon SPRacingF3 adalah konektor tweeter. Seperti dalam kasus vbat, di sisi atas papan ada konektor JST-XH dua-pin, dan di sisi bawah itu diduplikasi oleh bantalan kontak. Caranya adalahbahwa klon "pembumian" pada konektor adalah konstan dan ketika digunakan, "tweeter" akan selalu diaktifkan. Normal yang berfungsi untuk "tweeter" "earth" hanya ditampilkan di papan kontak. Ini mudah diperiksa oleh tester: "plus" dari konektor memanggil dengan "plus" pada pad kontak, dan "minus" - tidak memanggil. Karena itu, Anda perlu menyolder kabel untuk "tweeter" ke bagian bawah PC.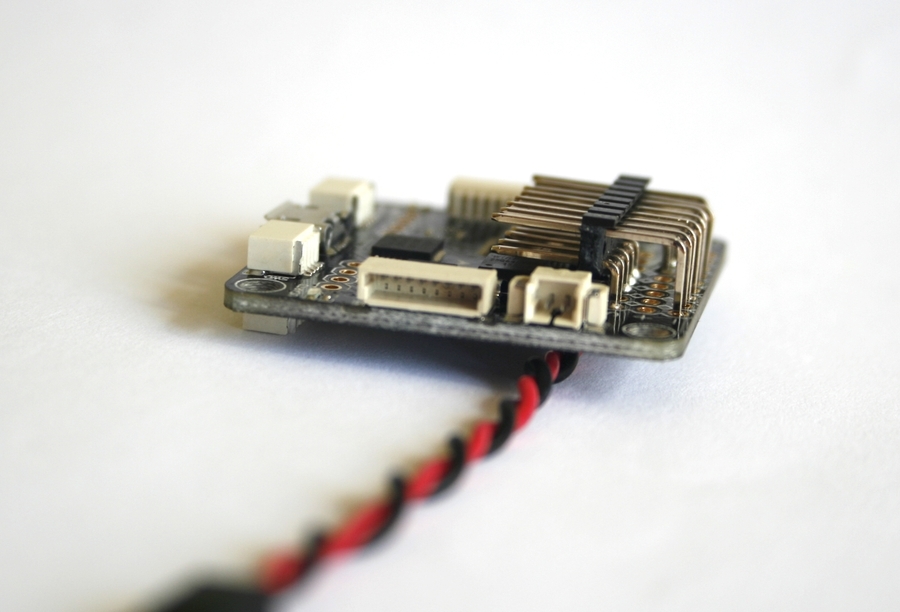 Konektor tiga pin dari regulator juga harus diganti. Dimungkinkan untuk menggunakan empat colokan dua-pin, tetapi sebagai gantinya, saya mengambil dua colokan empat-pin dan memasukkan semua pengontrol ke dalam satu "ground", dan sebuah kabel sinyal pada yang kedua (mengikuti urutan menghubungkan motor).
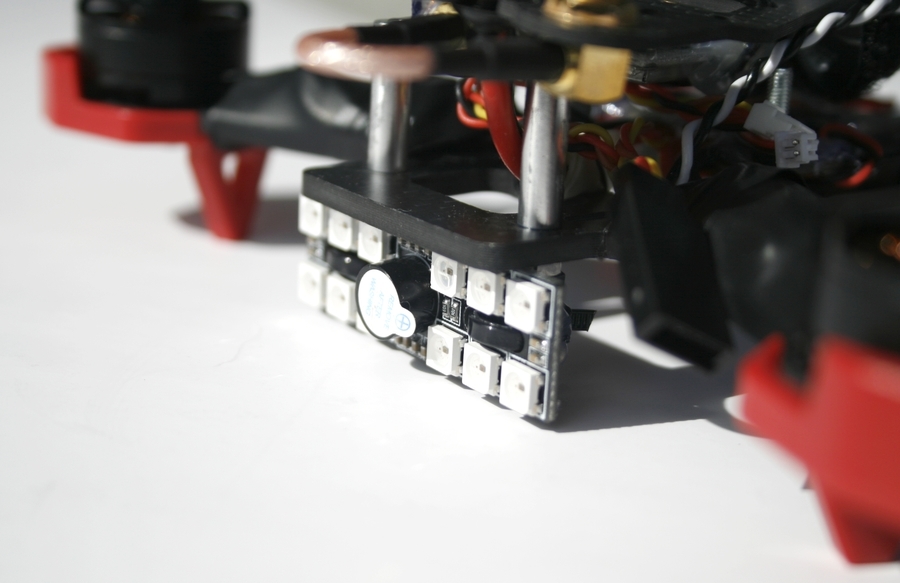
Konektor tiga pin dari regulator juga harus diganti. Dimungkinkan untuk menggunakan empat colokan dua-pin, tetapi sebagai gantinya, saya mengambil dua colokan empat-pin dan memasukkan semua pengontrol ke dalam satu "ground", dan sebuah kabel sinyal pada yang kedua (mengikuti urutan menghubungkan motor).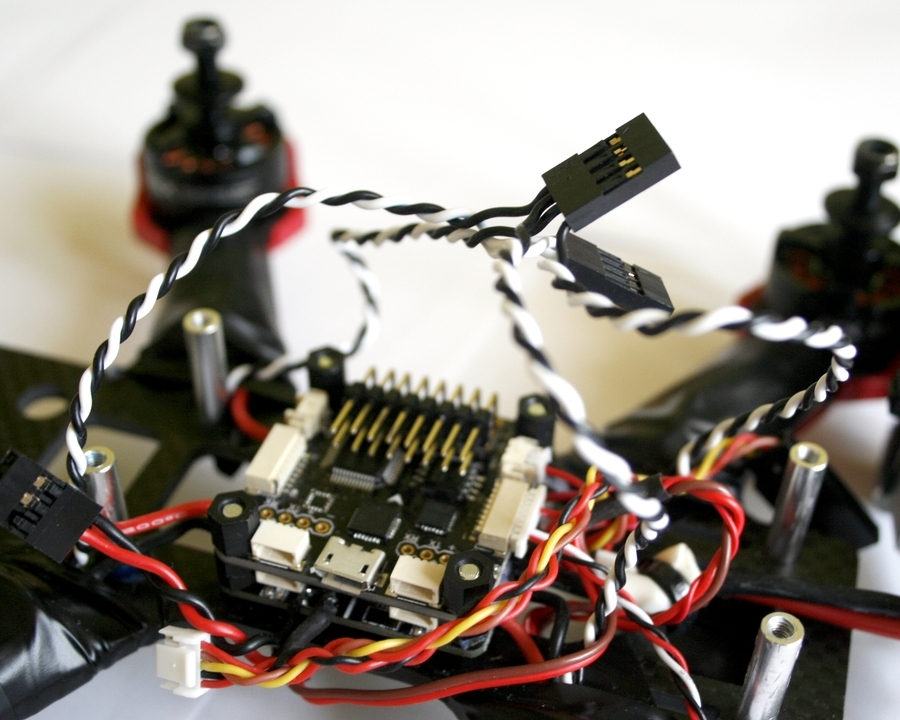 Plat backlit lebarnya lebih lebar dari bingkai dan menonjol di sisi. Satu-satunya tempat di mana baling-baling tidak akan mengenai itu adalah di bawah bingkai. Saya harus ke pertanian kolektif: Saya mengambil baut yang panjang, memasangnya dengan nilon dengan slot yang sudah jadi (sehingga ikatan yang menahan lampu latar bisa mengunci) dan memasangnya melalui pelat bawah ke dalam rak bingkai. Dia menarik pelat dengan LED ke kaki yang dihasilkan dengan dasi (lubang-lubang di piring pas dengan sempurna) dan mengisi ikatan dengan lem panas. Dari belakang konektor konektor solder.Sudah setelah perakitan, pada tahap pengaturan, ternyata ada yang tidak beres dengan squeaker. Segera setelah menghubungkan baterai, mulai berdecit monoton, dan jika Anda mengaktifkannya dari remote control, maka mencicit monoton ini ditumpangkan juga berirama. Pada awalnya saya berdosa di PC, tetapi setelah mengukur tegangan dengan multimeter, menjadi jelas di mana sebenarnya masalahnya. Bahkan, dari awal sangat mungkin untuk menghubungkan LED biasa ke kabel tweeter. Akibatnya, saya memesan beberapa tweeter sekaligus, mendengarkan mereka dan mengatur paling keras.
Plat backlit lebarnya lebih lebar dari bingkai dan menonjol di sisi. Satu-satunya tempat di mana baling-baling tidak akan mengenai itu adalah di bawah bingkai. Saya harus ke pertanian kolektif: Saya mengambil baut yang panjang, memasangnya dengan nilon dengan slot yang sudah jadi (sehingga ikatan yang menahan lampu latar bisa mengunci) dan memasangnya melalui pelat bawah ke dalam rak bingkai. Dia menarik pelat dengan LED ke kaki yang dihasilkan dengan dasi (lubang-lubang di piring pas dengan sempurna) dan mengisi ikatan dengan lem panas. Dari belakang konektor konektor solder.Sudah setelah perakitan, pada tahap pengaturan, ternyata ada yang tidak beres dengan squeaker. Segera setelah menghubungkan baterai, mulai berdecit monoton, dan jika Anda mengaktifkannya dari remote control, maka mencicit monoton ini ditumpangkan juga berirama. Pada awalnya saya berdosa di PC, tetapi setelah mengukur tegangan dengan multimeter, menjadi jelas di mana sebenarnya masalahnya. Bahkan, dari awal sangat mungkin untuk menghubungkan LED biasa ke kabel tweeter. Akibatnya, saya memesan beberapa tweeter sekaligus, mendengarkan mereka dan mengatur paling keras.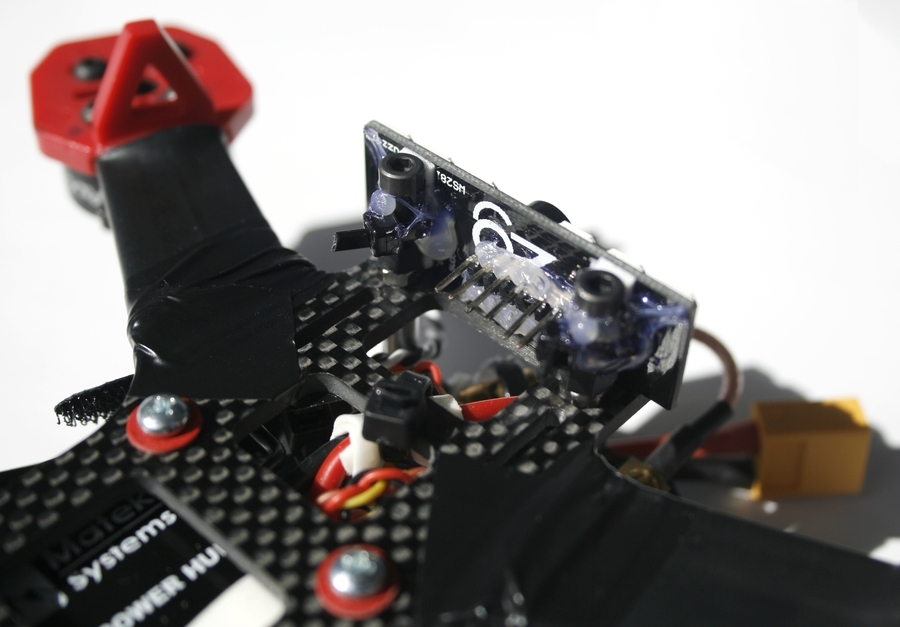
 Seringkali PDB dan pengontrol melekat pada bingkai dengan baut nilon, tapi saya tidak percaya kekuatan mereka. Jadi saya menggunakan baut logam 20mm dan sambungan nilon. Setelah memasang PDB, saya menyolder daya ke regulator (kabel lainnya disolder terlebih dahulu) dan mengisi tempat solder dengan lem panas. Saya memasang kabel daya utama yang mengarah ke baterai ke rangka sehingga tidak akan robek jika terjadi kecelakaan.
Seringkali PDB dan pengontrol melekat pada bingkai dengan baut nilon, tapi saya tidak percaya kekuatan mereka. Jadi saya menggunakan baut logam 20mm dan sambungan nilon. Setelah memasang PDB, saya menyolder daya ke regulator (kabel lainnya disolder terlebih dahulu) dan mengisi tempat solder dengan lem panas. Saya memasang kabel daya utama yang mengarah ke baterai ke rangka sehingga tidak akan robek jika terjadi kecelakaan.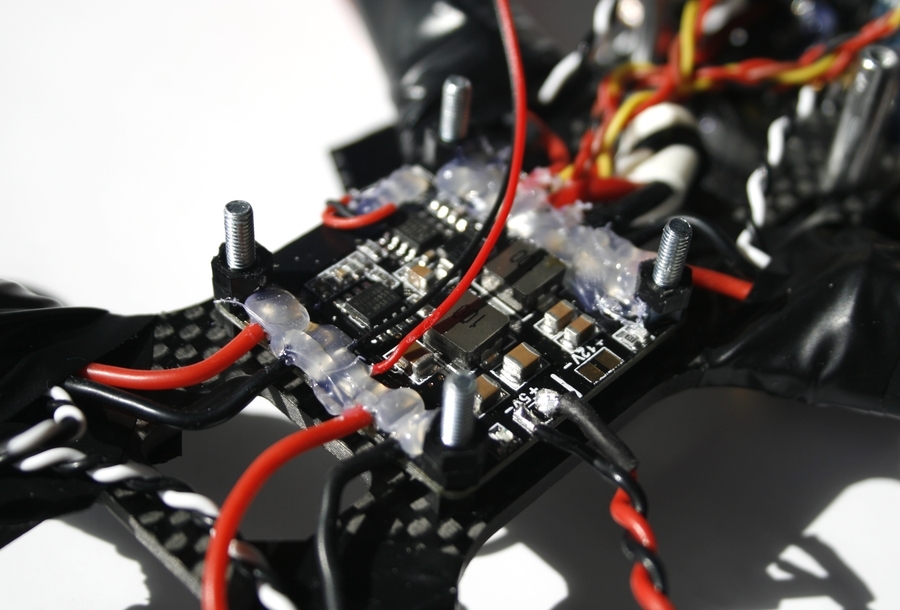 Saya melepas semua konektor dari receiver dengan tang, kecuali tiga yang diperlukan, dan saya melepaskan jumper antara saluran ketiga dan keempat langsung di papan tulis. Seperti yang saya tulis di atas, akan lebih bijaksana untuk mengambil penerima tanpa konektor. Saya juga mengerahkan antena padanya dan meleleh menjadi panas menyusut. Pada frame, penerima cocok antara PBD dan pilar belakang. Dengan pengaturan ini, indikatornya terlihat jelas dan ada akses ke tombol bind.
Saya melepas semua konektor dari receiver dengan tang, kecuali tiga yang diperlukan, dan saya melepaskan jumper antara saluran ketiga dan keempat langsung di papan tulis. Seperti yang saya tulis di atas, akan lebih bijaksana untuk mengambil penerima tanpa konektor. Saya juga mengerahkan antena padanya dan meleleh menjadi panas menyusut. Pada frame, penerima cocok antara PBD dan pilar belakang. Dengan pengaturan ini, indikatornya terlihat jelas dan ada akses ke tombol bind.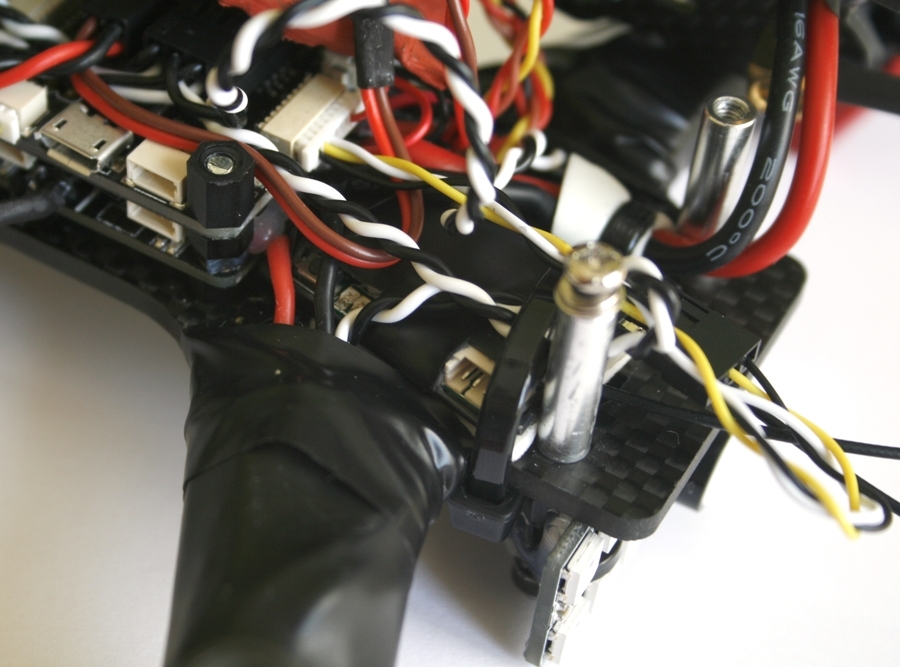 Saya memperbaiki pemancar video dengan ikatan dan lem panas ke pelat atas bingkai sehingga melalui slot ada akses ke tombol switching saluran dan indikator LED.
Saya memperbaiki pemancar video dengan ikatan dan lem panas ke pelat atas bingkai sehingga melalui slot ada akses ke tombol switching saluran dan indikator LED. Ada lubang khusus pada bingkai untuk memasang antena pemancar video. Tetapi jangan menghubungkannya langsung ke pemancar. Ternyata semacam tuas, di mana antena berfungsi sebagai satu bahu, pemancar itu sendiri dengan semua kabel sebagai yang lain, dan titik pemasangan konektor akan menjadi titik tumpu, yang akan memiliki beban maksimum. Jadi, jika terjadi kecelakaan dengan probabilitas hampir 100%, konektor pada papan pemancar terputus. Karena itu, Anda perlu memasang antena melalui beberapa jenis adaptor atau kabel ekstensi.Untuk MinimOSD, saya memutuskan untuk menyolder konektor, bukan kabel secara langsung. Di forum mereka menulis bahwa papan ini sering terbakar, oleh karena itu bijaksana untuk segera mempersiapkan kemungkinan penggantian. Saya mengambil bar dengan konektor dalam dua baris, menyolder yang lebih rendah ke bantalan berlubang, dan membawa vIn dan vOut ke yang atas. Setelah itu, ia mengisi tempat-tempat penyolderan dengan lem panas dan mengemas seluruh papan dengan panas menyusut.
Ada lubang khusus pada bingkai untuk memasang antena pemancar video. Tetapi jangan menghubungkannya langsung ke pemancar. Ternyata semacam tuas, di mana antena berfungsi sebagai satu bahu, pemancar itu sendiri dengan semua kabel sebagai yang lain, dan titik pemasangan konektor akan menjadi titik tumpu, yang akan memiliki beban maksimum. Jadi, jika terjadi kecelakaan dengan probabilitas hampir 100%, konektor pada papan pemancar terputus. Karena itu, Anda perlu memasang antena melalui beberapa jenis adaptor atau kabel ekstensi.Untuk MinimOSD, saya memutuskan untuk menyolder konektor, bukan kabel secara langsung. Di forum mereka menulis bahwa papan ini sering terbakar, oleh karena itu bijaksana untuk segera mempersiapkan kemungkinan penggantian. Saya mengambil bar dengan konektor dalam dua baris, menyolder yang lebih rendah ke bantalan berlubang, dan membawa vIn dan vOut ke yang atas. Setelah itu, ia mengisi tempat-tempat penyolderan dengan lem panas dan mengemas seluruh papan dengan panas menyusut. Sentuhan terakhir adalah stiker nomor telepon. Ini akan memberi setidaknya sedikit harapan jika terjadi kehilangan quadrocopter.
Sentuhan terakhir adalah stiker nomor telepon. Ini akan memberi setidaknya sedikit harapan jika terjadi kehilangan quadrocopter. Pertemuan tentang ini berakhir. Itu ternyata padat dan pada saat yang sama, akses ke semua badan pemerintahan yang diperlukan dipertahankan. Lebih banyak foto dapat dilihat di sini.. Massa quadrocoprera tanpa baterai adalah 330g, dengan baterai - 470g. Dan ini tanpa kamera aksi dan dipasang untuk itu. Pada artikel selanjutnya saya akan berbicara tentang firmware dan tuning quadrocopter yang dihasilkan.
Pertemuan tentang ini berakhir. Itu ternyata padat dan pada saat yang sama, akses ke semua badan pemerintahan yang diperlukan dipertahankan. Lebih banyak foto dapat dilihat di sini.. Massa quadrocoprera tanpa baterai adalah 330g, dengan baterai - 470g. Dan ini tanpa kamera aksi dan dipasang untuk itu. Pada artikel selanjutnya saya akan berbicara tentang firmware dan tuning quadrocopter yang dihasilkan. Source: https://habr.com/ru/post/id395455/
All Articles