“Asal usul proyek. Bagian 1.1. Bagaimana saya mengumpulkan robot telepresence di atas wheelbase. ” Teknologi Daya Tahan
Proyek: Endurance Robots & Laser Technologies.Artikel No. 1. “Asal usul proyek. Bagian 1.1. Bagaimana saya mengumpulkan robot telepresence di atas wheelbase. ”Pada 2015, anggota tim kami di masa depan berhasil mendapatkan cukup uang untuk mengambil risiko dalam jangka panjang (mereka menentukan cakrawala perencanaan 1 tahun). Dan kami memutuskan untuk mengatur startup. Terlibat dalam penjualan? Tidaaaak, startup teknologi! Yakni, pengembangan robot dan laser solid-state dengan kekuatan urutan 1-10 watt.Saya langsung menyukai gagasan berada di waktu yang tepat di tempat yang menarik untuk ribuan kilometer dan masih menyukainya! Kita semua suka streaming langsung. Dan berkat robotnya, saya juga mengendalikan arah pandangan saya, keberadaan saya. Oleh karena itu, pada tahun 2015, ketika kami memulai proyek Endurance Robots, saya mulai mengembangkan robot telepresence di atas roda. Wheelbase akan memungkinkan Anda untuk bergerak di sekitar ruangan atau di jalan, dan telepresence akan memastikan relevansi dari apa yang terjadi di sekitar situasi. Tujuan akhir: realitas virtual penuh, robot yang dikendalikan oleh seseorang dengan bantuan kacamata keretakan Oculus! Api!))Untuk memulai, saya mencari di Google dan mempelajari penawaran yang tersedia di pasar internasional: PadBot (Cina), BotEyes (Rusia), Robotika Ganda (AS), Webot (Rusia), OrigiBot (AS), Oculus (Kanada), Anybot (AS), RBOT Sinergi (Rusia), dan menyusun tabel karakteristik komparatif robot. Robot berbeda dalam fungsinya: kemampuan untuk mengambil benda dengan manipulator (sekaleng bir dari kulkas :), mengatasi hambatan tinggi, mengisi daya secara mandiri, dll. Secara alami, label harga melayang dan berkisar antara $ 1.000 hingga $ 10.000. Selanjutnya, saya menyadari bahwa perangkat berbiaya rendah hingga $ 5.000 adalah platform robot yang dikendalikan oleh operator manusia, tetapi sama sekali bukan robot otonom, yang mampu secara mandiri membuat keputusan dalam lingkungan yang berubah: mendekati rintangan, bepergian di sepanjang rute dari titik A ke titik B, pengenalan perintah bicara.Tim Endurance Robots kami memutuskan untuk memasuki pasar platform kelas ekonomi hingga $ 2000. Berdasarkan tabel karakteristik komparatif, saya menentukan karakteristik perangkat yang perlu dicapai di tempat pertama, yaitu: usia baterai (dari 8 jam, satu hari kerja), mengatasi hambatan (tinggi hingga 3,5 sentimeter, ambang pintu depan), transmisi andal perintah kontrol melalui Internet, komunikasi video dan audio berkualitas tinggi. Salah satu peserta dalam proyek bersikeras membuat tubuh robot dari manekin perempuan dan memasang tablet di antara payudara. Kami bahkan membeli torso bekas tanpa lengan, kaki, dan kepala seharga $ 2 (harga peragawati penuh ~ $ 100), tetapi karena anggaran terbatas ide ini akhirnya mati.yang harus dicapai di tempat pertama, yaitu: daya tahan baterai (dari 8 jam, seluruh hari kerja), mengatasi hambatan (tinggi hingga 3,5 sentimeter, ambang pintu depan), transmisi perintah kontrol yang andal melalui Internet, video berkualitas tinggi dan komunikasi audio. Salah satu peserta dalam proyek bersikeras membuat tubuh robot dari manekin perempuan dan memasang tablet di antara payudara. Kami bahkan membeli torso bekas tanpa lengan, kaki, dan kepala seharga $ 2 (harga peragawati penuh ~ $ 100), tetapi karena anggaran terbatas ide ini akhirnya mati.yang harus dicapai di tempat pertama, yaitu: daya tahan baterai (dari 8 jam, seluruh hari kerja), mengatasi hambatan (tinggi hingga 3,5 sentimeter, ambang pintu depan), transmisi perintah kontrol yang andal melalui Internet, video berkualitas tinggi dan komunikasi audio. Salah satu peserta dalam proyek bersikeras membuat tubuh robot dari manekin perempuan dan memasang tablet di antara payudara. Kami bahkan membeli torso bekas tanpa lengan, kaki, dan kepala seharga $ 2 (harga peragawati penuh ~ $ 100), tetapi karena anggaran terbatas ide ini akhirnya mati.Salah satu peserta dalam proyek bersikeras membuat tubuh robot dari manekin perempuan dan memasang tablet di antara payudara. Kami bahkan membeli torso bekas tanpa lengan, kaki, dan kepala seharga $ 2 (harga peragawati penuh ~ $ 100), tetapi karena anggaran terbatas ide ini akhirnya mati.Salah satu peserta dalam proyek bersikeras membuat tubuh robot dari manekin perempuan dan memasang tablet di antara payudara. Kami bahkan membeli torso bekas tanpa lengan, kaki, dan kepala seharga $ 2 (harga peragawati penuh ~ $ 100), tetapi karena anggaran terbatas ide ini akhirnya mati. Dalam proses pengujian permintaan, menjadi jelas bahwa orang mencari tidak hanya tablet di atas roda, tetapi lebih pada platform robot yang dapat melakukan tugas intelektual manusia: mengenali objek dan ucapan (teknologi open source OpenCV), menjawab pertanyaan dengan benar (AI), untuk mengatasi rute ke subjek, tangkap subjek dan transfer ke tujuan. Artinya, wheelbase bukan yang utama, tetapi tambahan yang diperlukan untuk apa yang kami tawarkan. Secara strategis, wheelbase tetap menjadi faktor bentuk utama. Dengan analogi, laptop -> tablet. Yaitu bentuk baru adalah produk baru.
Dalam proses pengujian permintaan, menjadi jelas bahwa orang mencari tidak hanya tablet di atas roda, tetapi lebih pada platform robot yang dapat melakukan tugas intelektual manusia: mengenali objek dan ucapan (teknologi open source OpenCV), menjawab pertanyaan dengan benar (AI), untuk mengatasi rute ke subjek, tangkap subjek dan transfer ke tujuan. Artinya, wheelbase bukan yang utama, tetapi tambahan yang diperlukan untuk apa yang kami tawarkan. Secara strategis, wheelbase tetap menjadi faktor bentuk utama. Dengan analogi, laptop -> tablet. Yaitu bentuk baru adalah produk baru. Tugas pada tahap pertama adalah mengembangkan wheelbase: murah (tidak lebih dari $ 200 untuk produksi skala kecil), efisien (yang akan bergerak dengan andal, memiliki modularitas dan kemampuan untuk dengan cepat memperbaiki), sederhana (mirip dengan apa yang dipasang telepon, aplikasi yang diunduh dan sistem bekerja) ), andal (perangkat lunak, perangkat keras), yang di masa depan dapat ditingkatkan. Operator harus dapat mengirim sinyal ke motor listrik dan servo melalui Internet.Jadi, PRINSIP DASAR dari suatu desain.- Fleksibilitas platform ala "kendaraan segala medan" tidak dikejar. Model lingkungan = dalam ruangan. Permukaannya rata, (laminasi, ubin, kayu, beton, linoleum), hambatan hingga 1 cm.- Prioritas dalam urutan berikut: daya tarik, ergonomi dan kesederhanaan, mobilitas.- Pembuatan prototipe yang dimodelkan untuk produksi industri.- Keandalan dalam operasi harian (1 tahun)- Dapat diganti atau saling melengkapi (letakkan speaker kedua atau kamera kedua ada di mana).- Fleksibilitas pengencang.- Pergerakan bujursangkar, bukan zig-zag.- Kebisingan dan getaran kurang dari 10 desibel.- Kolapibilitas dan kemudahan konstruksi untuk dipindahkan dari satu gedung ke gedung lainnya.
Tugas pada tahap pertama adalah mengembangkan wheelbase: murah (tidak lebih dari $ 200 untuk produksi skala kecil), efisien (yang akan bergerak dengan andal, memiliki modularitas dan kemampuan untuk dengan cepat memperbaiki), sederhana (mirip dengan apa yang dipasang telepon, aplikasi yang diunduh dan sistem bekerja) ), andal (perangkat lunak, perangkat keras), yang di masa depan dapat ditingkatkan. Operator harus dapat mengirim sinyal ke motor listrik dan servo melalui Internet.Jadi, PRINSIP DASAR dari suatu desain.- Fleksibilitas platform ala "kendaraan segala medan" tidak dikejar. Model lingkungan = dalam ruangan. Permukaannya rata, (laminasi, ubin, kayu, beton, linoleum), hambatan hingga 1 cm.- Prioritas dalam urutan berikut: daya tarik, ergonomi dan kesederhanaan, mobilitas.- Pembuatan prototipe yang dimodelkan untuk produksi industri.- Keandalan dalam operasi harian (1 tahun)- Dapat diganti atau saling melengkapi (letakkan speaker kedua atau kamera kedua ada di mana).- Fleksibilitas pengencang.- Pergerakan bujursangkar, bukan zig-zag.- Kebisingan dan getaran kurang dari 10 desibel.- Kolapibilitas dan kemudahan konstruksi untuk dipindahkan dari satu gedung ke gedung lainnya. KARAKTERISTIK TEKNIS suatu desain.- Kecepatan maksimum hingga 3 km / jam.- Ketinggian tepi atas layar adalah ~ 1,5 m. (Lebih disukai, dengan kemungkinan berubah dari 1,2 m menjadi 1,8 m).- Berapa kg pada ketinggian 180 cm? Tablet + dudukan + dua servos. Akankah desain roda tiga stabil dengan baterai yang dipilih di sepanjang sisi ketika mengenai rintangan 3,5 cm dengan satu roda atau dua roda?Dan kemudian satu juta pertanyaan jatuh ... Berapa ukuran roda? Materi apa?
KARAKTERISTIK TEKNIS suatu desain.- Kecepatan maksimum hingga 3 km / jam.- Ketinggian tepi atas layar adalah ~ 1,5 m. (Lebih disukai, dengan kemungkinan berubah dari 1,2 m menjadi 1,8 m).- Berapa kg pada ketinggian 180 cm? Tablet + dudukan + dua servos. Akankah desain roda tiga stabil dengan baterai yang dipilih di sepanjang sisi ketika mengenai rintangan 3,5 cm dengan satu roda atau dua roda?Dan kemudian satu juta pertanyaan jatuh ... Berapa ukuran roda? Materi apa? Apa jenis: omni, halus, dengan tapak yang dalam?
Apa jenis: omni, halus, dengan tapak yang dalam? Berapa banyak roda: tiga atau empat? Bagaimana cara menanam di poros?
Berapa banyak roda: tiga atau empat? Bagaimana cara menanam di poros? Ke gearbox atau poros motor?
Ke gearbox atau poros motor? Motor mana yang harus dipilih: kolektor, brushless, step? Dari bahan apa untuk membuat bingkai? Sebagai hasilnya, saya membuat prototipe pertama dari bahan yang mudah diakses yang dijual di toko perangkat keras: 3 roda (dua terkemuka dan satu putar), bingkai yang terbuat dari profil aluminium berbentuk U yang tipis, sekrup dan baut yang dapat disadap sendiri, 2 motor stepper.
Motor mana yang harus dipilih: kolektor, brushless, step? Dari bahan apa untuk membuat bingkai? Sebagai hasilnya, saya membuat prototipe pertama dari bahan yang mudah diakses yang dijual di toko perangkat keras: 3 roda (dua terkemuka dan satu putar), bingkai yang terbuat dari profil aluminium berbentuk U yang tipis, sekrup dan baut yang dapat disadap sendiri, 2 motor stepper.
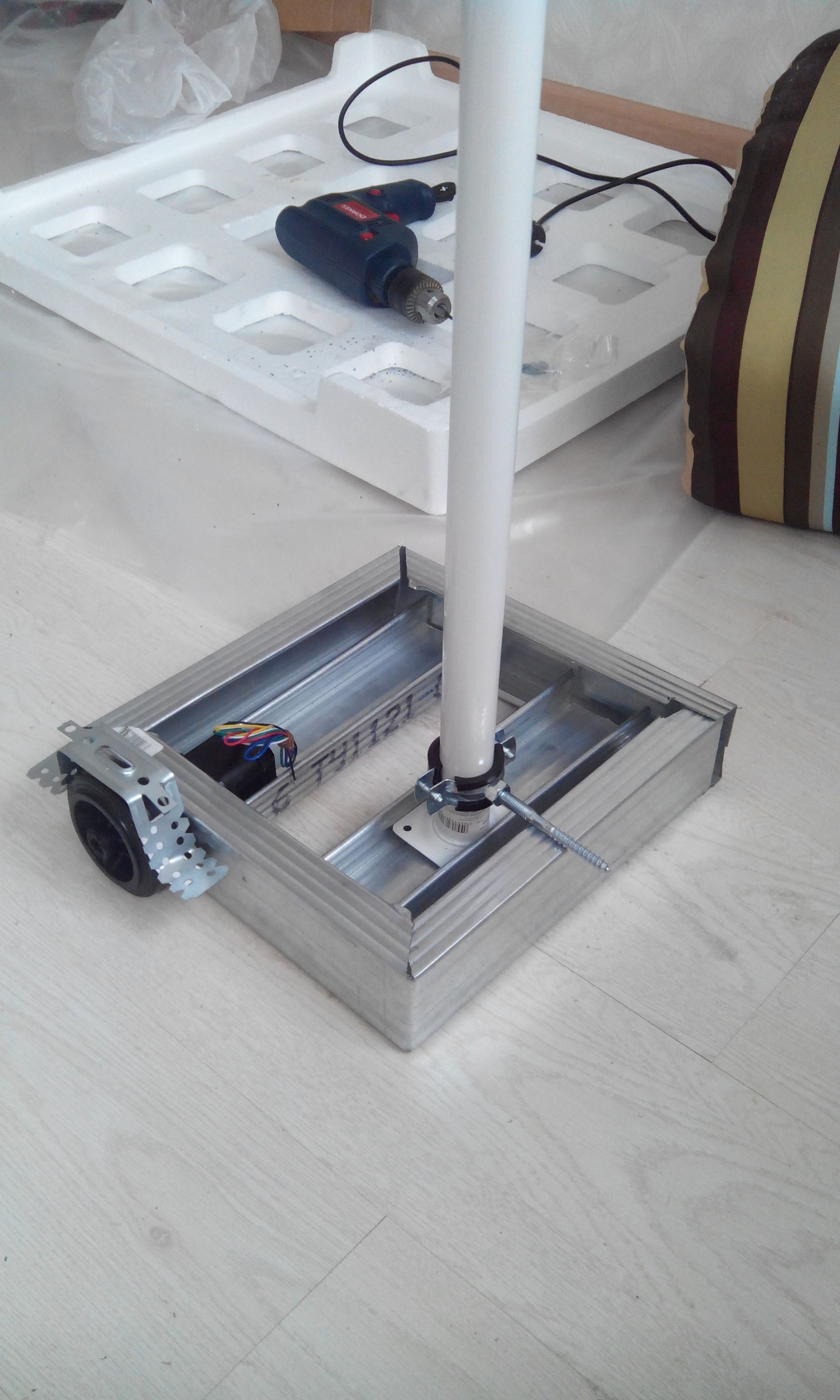 Hal utama adalah bahwa prototipe ini memenuhi misinya: untuk melayani sirkuit kami Andrei untuk menguji elektronik naik turun.Dalam artikel ini, saya menggambarkan awal perjalanan panjang kami. Produk dan foto amatir. Tetapi di bagian berikut saya akan menunjukkan pendekatan yang lebih profesional:Tata letak elemen mekanika dan elektronik, yang kami fokuskan pada:
Hal utama adalah bahwa prototipe ini memenuhi misinya: untuk melayani sirkuit kami Andrei untuk menguji elektronik naik turun.Dalam artikel ini, saya menggambarkan awal perjalanan panjang kami. Produk dan foto amatir. Tetapi di bagian berikut saya akan menunjukkan pendekatan yang lebih profesional:Tata letak elemen mekanika dan elektronik, yang kami fokuskan pada: Kelanjutan artikel di sini: “Lanjutan. Bagian 1.2. Bagaimana saya mengumpulkan robot telepresence di atas wheelbase. ” Teknologi Robot & Laser Daya Tahan
Kelanjutan artikel di sini: “Lanjutan. Bagian 1.2. Bagaimana saya mengumpulkan robot telepresence di atas wheelbase. ” Teknologi Robot & Laser Daya Tahan Source: https://habr.com/ru/post/id395507/
All Articles