5 sensor autopilot dan kesulitannya (sejauh ini) yang tidak dapat larut
 Bagian pertama dari tinjauan masalah autopilot berjalan dengan baik dan waktu untuk melanjutkan. Hidup tidak tinggal diam dan Tesla masih berjuang (Tesla Model X juga, tapi sejauh ini tanpa bantuan autopilot). Apa yang salah dengan sensor ADAS? Dan mengapa di tahun-tahun mendatang tidak ada yang berubah secara dramatis?Banyak orang, secara mengejutkan, mendekati kemampuan fisik mereka. Ini dapat dikatakan dengan percaya diri, karena sistem yang tercantum di bawah ini digunakan tidak hanya di mobil dan memiliki pasar besar di luar dunia otomotif. Ini adalah banyak uang, miliaran dolar dalam R&D dan kemajuan yang agak lambat.Sekarang lebih detail.Jenis sensor - seperti jari di tangan, lima:
Bagian pertama dari tinjauan masalah autopilot berjalan dengan baik dan waktu untuk melanjutkan. Hidup tidak tinggal diam dan Tesla masih berjuang (Tesla Model X juga, tapi sejauh ini tanpa bantuan autopilot). Apa yang salah dengan sensor ADAS? Dan mengapa di tahun-tahun mendatang tidak ada yang berubah secara dramatis?Banyak orang, secara mengejutkan, mendekati kemampuan fisik mereka. Ini dapat dikatakan dengan percaya diri, karena sistem yang tercantum di bawah ini digunakan tidak hanya di mobil dan memiliki pasar besar di luar dunia otomotif. Ini adalah banyak uang, miliaran dolar dalam R&D dan kemajuan yang agak lambat.Sekarang lebih detail.Jenis sensor - seperti jari di tangan, lima:- kamera
- radar
- Lidar
- USG
- kamera inframerah.
Klasifikasi dipilih untuk kenyamanan dan bukan ketaatan pada kebenaran teknologi. Secara umum, Anda dapat berbagi dengan berbagai cara:- pasif (kamera) dan aktif (radar lidar),
- dalam rentang yang terlihat (kamera) dan tidak (yang lainnya, termasuk IR),
- berdasarkan frekuensi (dari ultrasonik ke lidar).
Semua sensor ini sangat berbeda dan memberikan berbagai informasi kepada otak elektronik.Apa yang penting untuk diketahui tentang pasar secara keseluruhan?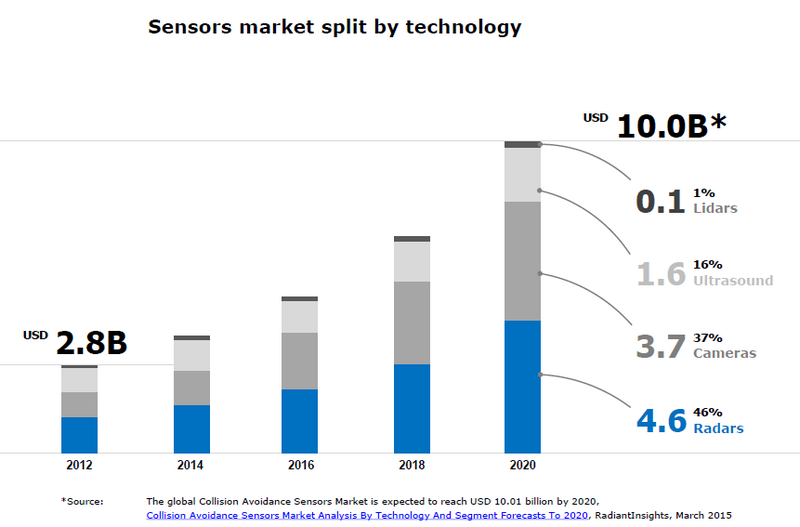 Estimasi bervariasi, tetapi urutannya sama. Keseimbangan ini cenderung mendukung kamera dan radar, yang untuk dua menempati 85 persen dari pasar uang. Lidar tetap menjadi solusi khusus (hanya jika tidak ada terobosan), dan sensor ultrasonik tidak dapat melampaui niche dan terobosan mereka, sekali lagi, itu tidak terlihat. Sistem penglihatan malam hilang bahkan dengan latar belakang kapel.Sekarang lebih detail.
Estimasi bervariasi, tetapi urutannya sama. Keseimbangan ini cenderung mendukung kamera dan radar, yang untuk dua menempati 85 persen dari pasar uang. Lidar tetap menjadi solusi khusus (hanya jika tidak ada terobosan), dan sensor ultrasonik tidak dapat melampaui niche dan terobosan mereka, sekali lagi, itu tidak terlihat. Sistem penglihatan malam hilang bahkan dengan latar belakang kapel.Sekarang lebih detail.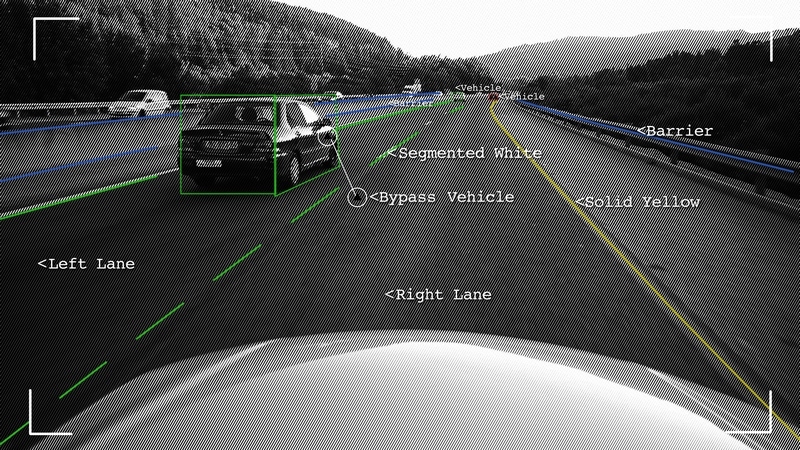
CAMERAS
Kerjanya seperti ini: menerima gambar dunia dalam rentang yang terlihat, diproses (frame dan urutan individual), dikenali.Pro:- Hanya kamera yang bisa mengenali tanda dan rambu jalan.
- Kamera memiliki resolusi sudut yang baik, yaitu, kamera "memahami" objek yang bergerak melintasi mobil (pejalan kaki menyeberang jalan).
- Menurut gambar dari kamera, klasifikasi objek secara langsung dimungkinkan ("anjing" - "anak" - "dewasa" - "sepeda" - "sepeda" - "mobil" - "truk").
- Dan, tentu saja, kamera terjangkau - mulai dari beberapa ratus dolar hingga pembeli.
Cons:- Kamera memiliki resolusi yang buruk dalam jangkauan, mereka hampir tidak memahami jarak ke hambatan atau kecepatan pendekatan (kamera stereo sebagian menyelesaikan masalah).
- Tidak ada pengukuran langsung dari kecepatan objek, dapat dipahami oleh serangkaian frame, dan masih pengukurannya fuzzy.
- Sangat dipengaruhi oleh kondisi cuaca dan jalan - "van putih melawan langit yang cerah" dalam kecelakaan baru-baru ini.
- Pemrosesan data dari kamera membutuhkan waktu: penundaan lebih besar, semakin kompleks sistem kamera.
Pasar ramai oleh gajah dari Intel dan NVIDIA hingga Mobileye dan Magna International. Ada banyak startup, ambang entri rendah. Perkembangan teknologi bertumpu pada kecepatan dan kualitas pemrosesan data, yaitu pada prosesor dan algoritma. Tidak mungkin untuk secara drastis meningkatkan kecepatan pemrosesan, dan algoritma terobosan belum menembus apa pun.Kesimpulan:
Anda masih tidak dapat melakukannya tanpa kamera di dalam mobil.
RADAR
Ini bekerja seperti ini: dipancarkan pada frekuensi sangat tinggi, mendengarkan apa yang kembali, segera mengenali jarak ke rintangan, kecepatan dan sudutnya.Pro:- Kondisi cuaca mempengaruhi operasi radar, warna benda dan cahaya tidak terpengaruh sama sekali.
- Resolusi yang baik dalam jangkauan dan kecepatan, pengukuran langsung jangkauan dan kecepatan dengan akurasi yang baik tersedia.
- Pemrosesan data instan (1 / 20–1 / 50 detik), yang sangat penting untuk kecepatan tinggi.
- Kemampuan untuk dengan mudah mengakumulasi dan menganalisis informasi dalam dinamika karena sedikitnya jumlah informasi. Untuk alasan yang sama, cocok untuk V2I / V2V
Cons:- Tidak lebih murah, dan seringkali lebih mahal daripada kamera. Lebih mahal dari $ 1.000 untuk radar jarak jauh.
- Resolusi sudut buruk (sulit bagi radar untuk memahami pergerakan melintasi).
- Tidak ada peluang langsung untuk mengklasifikasikan hambatan atau mengevaluasi dimensinya.
- Ketergantungan yang kuat pada sudut pandang. Jika kita menyinari sinar jauh dan sempit, kita tidak melihat gangguan di jalan dan di samping. Kami bersinar lebar - kami mendapat jangkauan kecil.
Ada gajah di pasar, dengan hanya nama lain - Bosch Global, Delphi, Smartmicro. Hampir tidak ada startup, ambang entri sangat tinggi karena tingginya biaya peralatan untuk pengembangan microwave. Metode pemrosesan telah berubah sedikit selama 50 tahun terakhir, investasi dalam pengembangan dan pengaturan produksi komponen (sebagai jalur antena-pengumpan) diukur dalam ratusan juta euro. Transceiver yang terjangkau dan berkualitas tinggi, yang tanpanya tidak ada solusi massal sama sekali, menghasilkan lima perusahaan di seluruh dunia. Radar terus membaik, tetapi pembangunan membutuhkan waktu puluhan tahun.Kesimpulan:
Kekuatan radar adalah kelemahan kamera dan sebaliknya. Tanpa radar, juga tidak bisa.Bukan saya yang membuat, tetapi Mr. Musk:"... Itu mengatakan, aku tidak berpikir kamu membutuhkan LIDAR. Saya pikir Anda bisa melakukan ini semua dengan optik pasif dan kemudian dengan mungkin satu RADAR maju ... jika Anda mengemudi cepat ke hujan atau salju atau debu. Saya pikir itu sepenuhnya menyelesaikannya tanpa menggunakan LIDAR. Saya bukan penggemar berat LIDAR, saya pikir itu tidak masuk akal dalam konteks ini. ”

LIDAR
Laser rangefinders: mereka bersinar dengan laser, melihat apa yang kembali, mengeluarkan berbagai titik dengan jarak ke mereka.Pro:- Wunderwaffle, melihat semuanya di sekitar secara detail dan dengan akurasi tinggi. Kecuali mereka, tidak ada yang bisa dan tidak akan pernah.
Cons:- Scanar lidar melihat bentangan jalan yang sama hanya dua hingga tiga kali per detik.
- Biaya tinggi, tanpa - BIAYA lidar.
- Lidar masih rapuh.
- Singkatnya, sisanya adalah kontra
Ada pemain keren di pasar - Velodyne LiDAR, Quanergy, Sick. Semua keputusan relatif muda, beberapa startup, tetapi relatif besar. Pemain level Bosch yang benar-benar besar dengan puluhan miliar pendapatan di sektor otomotif tidak lagi ada di pasar dan tidak akan pernah ada. Dengan penurunan dalam biaya lidar dan ditinggalkannya bagian yang bergerak, kemampuan dan kebutuhan lidar juga jatuh serempak. Setiap orang menunggu keputusan untuk 250 dolar, tetapi ada sesuatu yang hilang.Sederhana dan mudah dimengerti: pasar mobil untuk larsar seratus kali lebih kecil dari pasar untuk radar atau kamera, dan penuh dengan aplikasi lainKesimpulan:
Sampai revolusi terjadi, kapten akan tetap menjadi solusi khusus. Baik untuk membuat prototipe, tidak mungkin untuk mobil produksi. Ya, dan untuk membuat prototipe itu buruk: logika yang diasah untuk lidar tidak beradaptasi dengan baik dengan sensor lain. ULTRASOUNDSensor parkir terkenal: memancarkan sinyal frekuensi tinggi, menunggu sampai kembali, menghitung waktu.Pro:
ULTRASOUNDSensor parkir terkenal: memancarkan sinyal frekuensi tinggi, menunggu sampai kembali, menghitung waktu.Pro:- Sangat murah, seratus atau dua dolar untuk sistem multi-sensor
- Sensor mudah diintegrasikan.
- Teknologi ini sudah mapan dan bisa dimengerti, Anda bahkan bisa bereksperimen di rumah menggunakan arduino.
Cons:- Rentang terbatas pada unit meter.
- Tidak ada cara untuk memahami sudut ke objek atau langsung mengukur kecepatan.
- Keandalan data rendah.
Sekarang pasar didominasi oleh noname Cina, rawa telah lama diinjak-injak, ada beberapa yang ingin berinvestasi dalam proyek-proyek baru. Ada beberapa startup, tetapi ada misalnya Toposens , yang melakukan hal keren pada ultrasound, tetapi sesuatu tiba-tiba mulai membuat radar juga.Kesimpulan:
Segera setelah radar dan litarar belajar untuk melakukan jarak pendek dengan baik, USG akan tetap untuk arduino saja. Lelucon :). KAMERA INFRAMERAHCara kerjanya: melihat dalam rentang inframerah, menganalisis gambar pada matriks.Pro:
KAMERA INFRAMERAHCara kerjanya: melihat dalam rentang inframerah, menganalisis gambar pada matriks.Pro:- Orang-orang panas dan binatang hutan terlihat jelas.
Cons:- Mahal, beberapa ribu dolar hanya untuk kamera depan
- Lingkup sempit
- Keterbatasan suhu penggunaan.
Kesimpulan:
Kisah ceruk yang bahkan dari Lidars. Radar dengan larsar akan menendang mereka keluar dari pasar mobil segera, jika belum.Dan sekarang - manis. Untuk meringkas:- Tidak ada sensor atau sistem sensor yang dapat menjadi universal. Jika kita berbicara tentang peran satu-satunya dalam solusi kelas bawah - ini adalah kamera. Kedua, radar.
- Setiap sistem ADAS dan terutama autopilot akan menggunakan sistem beberapa sensor. Ini disebut sensor fusion dan terutama akan menggabungkan kamera dan radar. Saya curiga mereka akan selesai.
- Semakin banyak informasi heterogen yang ingin Anda kumpulkan, semakin mahal biayanya (setengah masalah) dan semakin banyak waktu yang dibutuhkan. Semakin lama kami memproses, semakin lambat kami harus mengemudi agar aman. Karenanya naik kura-kura dari kebanyakan pilot otomatis dan cinta cuaca baik.
Dan itu belum semuanya. Sekarang mari kita bicara tentang masalah dunia nyata .Source: https://habr.com/ru/post/id396185/
All Articles