Cara membuat mobil balap segala medan dari ATV anak-anak
 Tidak ada apa pun di dunia ini yang bertahan selamanya, tetapi beberapa produk Cina cukup memukau dengan "daya tahannya." Saya akan menceritakan tentang pengalaman saya dalam memodernisasi ATV anak-anak.Apa yang kita miliki: ATV KL-789 anak-anak dengan kerusakan kecil, sedikit waktu luang dan keinginan untuk tetap menggunakan arduino yang kelebihan beban di sana.Apa yang ingin kita dapatkan: sesuatu bekerja lebih dari satu bulan, lebih disukai dengan karakteristik berlari yang ditingkatkan.ATV memiliki dua motor pengumpul RS550 untuk 12V, dengan kecepatan poros 19300 rpm saat idle, terhubung ke roda belakang dengan diameter ~ 30 cm melalui gearbox dengan rasio roda gigi ~ 131. Matematika sederhana menunjukkan bahwa kecepatan maksimum kendaraan yang diberikan harus 19300/131/60 * 3,14 * 0,3 = 2,31 m / s atau 8,3 km / jam. Dalam praktiknya, ini berjalan sekitar 7 km / jam. Selama pemilihan komponen baru, saya berjuang dengan keinginan untuk membuat kecepatan maksimum, dan ketakutan bahwa ini akan menjadi kendaraan yang terlalu berbahaya untuk anak-anak. Karena itu, diputuskan bahwa ia harus pergi 1,5-2 kali lebih cepat. Selain mesin, saya kecewa di dalamnya:
Tidak ada apa pun di dunia ini yang bertahan selamanya, tetapi beberapa produk Cina cukup memukau dengan "daya tahannya." Saya akan menceritakan tentang pengalaman saya dalam memodernisasi ATV anak-anak.Apa yang kita miliki: ATV KL-789 anak-anak dengan kerusakan kecil, sedikit waktu luang dan keinginan untuk tetap menggunakan arduino yang kelebihan beban di sana.Apa yang ingin kita dapatkan: sesuatu bekerja lebih dari satu bulan, lebih disukai dengan karakteristik berlari yang ditingkatkan.ATV memiliki dua motor pengumpul RS550 untuk 12V, dengan kecepatan poros 19300 rpm saat idle, terhubung ke roda belakang dengan diameter ~ 30 cm melalui gearbox dengan rasio roda gigi ~ 131. Matematika sederhana menunjukkan bahwa kecepatan maksimum kendaraan yang diberikan harus 19300/131/60 * 3,14 * 0,3 = 2,31 m / s atau 8,3 km / jam. Dalam praktiknya, ini berjalan sekitar 7 km / jam. Selama pemilihan komponen baru, saya berjuang dengan keinginan untuk membuat kecepatan maksimum, dan ketakutan bahwa ini akan menjadi kendaraan yang terlalu berbahaya untuk anak-anak. Karena itu, diputuskan bahwa ia harus pergi 1,5-2 kali lebih cepat. Selain mesin, saya kecewa di dalamnya:- Baterai Gel 12V 10Ah, kehilangan sebagian besar kapasitas pada arus debit tinggi
- Sistem manajemen. Kecepatan pertama adalah pedal, motor dihubungkan secara seri. Kecepatan kedua adalah pegangan di setir, mesin terhubung secara paralel. Rem otomatis ketika pedal dilepaskan, gulungan motor menutup. Sirkuit ini mengarah ke start yang terlalu mendadak, sama sekali tidak ada rolling bebas, rem mendadak yang sama, semua ini mengarah pada beban arus tinggi (tombol pedal meleleh selama bulan operasi), dan beban mekanis pada gearbox dan roda, belum lagi dangkal yang tidak nyaman berkendara
- Kabel listrik Bagian 0.75-1 sq. mm, yang dengan arus pengenal 20A dipanaskan hingga suhu yang signifikan
Yaitu Saya tidak suka sama sekali semua listrik. Setelah sedikit refleksi, diputuskan untuk menggunakan:- 11.1V () 240 (, , )
- 36000 rpm 11.1V, ~40000 rpm
- 120 ( )
- - , ,
- 100
- Bluetooth ,
- / , ,
- ,
- FET , 4 ,
- Teensy 2.0,
- -
- - , , , ,
Selain itu, untuk mengurangi keributan roda plastik dan meningkatkan kenyamanan berkendara, 4 ban 12,5 "dibeli untuk kereta bayi, setelah itu mereka mengalami sedikit perbaikan dengan pisau klerikal, dan kemudian mereka ditarik ke atas roda ATV dan diikat dengan sekrup self-tapping: Ketika semuanya tiba, saya merakit prototipe di lutut saya, ternyata mesin bahkan tanpa beban panas hingga 70 derajat dalam 3-5 menit operasi, saya harus membeli dua pendingin untuk mereka, dan regulator, sebaliknya, tidak memanas bahkan dengan kipas dimatikan (melihat ke depan, mereka juga tidak memanas pada ATV yang sedang dimuat). Karena kami memiliki dua mesin dari dua sisi yang berbeda, itu perlu untuk menyelesaikan masalah lain - motor sentuh berputar hanya dalam satu arah. Awalnya, itu direncanakan untuk membongkar satu motor, dan menghidupkan sensor di dalamnya 180 derajat ... tetapi kenyataannya telah menunjukkan bahwa ini tidak dapat dilakukan dengan sedikit darah. Selain itu, selama percobaan dengan sensor dan timing, salah satu regulator terbakar sebagian, sebagai hasilnya, saya menolak sensor dan menghubungkannya seperti BC biasa. Sensor itu sendiri terdiri dari tiga sensor Hall yang melacak posisi rotor, dan sensor suhu. Diputuskan untuk tidak meninggalkan seluruh ekonomi ini, tetapi untuk menghubungkannya ke MK dan menggunakannya sebagai sensor suhu mesin, sensor kecepatan mesin, dan kemudian,mengetahui rasio roda gigi - dan sebagai sensor kecepatan.Perpustakaan pwmservo agak membingungkan, ia dirancang untuk mengontrol servos (dalam kasus saya, regulator) melalui perangkat keras PWM, dengan akurasi 1 derajat, hanya 180 negara, dan arah "maju" hanya setengah kisaran, mis. 90 negara. Tampak bagi saya bahwa ini tidak cukup, saya harus mengedit perpustakaan dengan merugikan arduin lintas-platform (ternyata hanya untuk pengontrol dengan 16 MHz), hasilnya adalah 1000 negara di setiap arah (unit adalah durasi PWM 0,5 μs, PWM dari 1 hingga 2 ms).Setelah pekerjaan "pada lutut" kurang lebih debugged, semua ekonomi ini dipasang pada sepeda quad:Karena daya ternyata lebih dari 500 W, itu perlu untuk membatasi laju kenaikan gas, jika Anda tajam mengubah gas ke maksimum, daya akan meningkat dengan lancar, dan akan mencapai maksimumnya dalam waktu sekitar 3 detik. Saya yakin bahwa tanpa ini efek rollover instan akan terjadi.Secara umum, ini adalah rekaman video telemetri dari layar ponsel, semuanya terlihat di sana, hanya karena sensor kecepatan yang sedikit tertekuk di mesin kiri (kolom hijau kiri) data kecepatannya sedikit diremehkan, kecepatan maksimum yang dicapai dengan baterai baru adalah 18 km / hNilai kolom: suhu mesin biru dalam derajat, kecepatan mesin hijau dalam rpm, tenaga oranye dipasok ke mesin dalam angka sewenang-wenang dari 0 hingga 1000, posisi abu-abu menangani gas.Dan begini caranya:Saya tidak menyeret saya pergi ... itu macet, tapi saya mengendarai ATV itu sendiri, dan menilai dengan telemetri, dia benar-benar tidak peduli siapa yang ada di atasPada video pertama di awal, sebuah krisis terdengar. Pada malam pertama, gearbox benar-benar rusak. Masalahnya ternyata adalah bahwa gearbox terdiri dari roda gigi nilon yang berputar pada sumbu baja 9 mm tanpa bantalan, sehingga gaya gesekan roda gigi sangat besar sehingga bagian tengah meleleh di roda gigi dan perataannya hilang. Pada gigi lain, gigi dilas ke sumbu, dan sumbu mulai berputar di dalam tubuh dan melelehkannya, sehingga gigi tersebut juga kehilangan arah.Untuk mengatasi masalah ini, kami membutuhkan:Gandar baru berukuran 5 mm, jadi saya harus mencetak busing dengan diameter eksternal 9 mm pada printer 3D, dan bagian dalam 5 mm, untuk memasang kapak baru di kotak gir yang lama, lubang 11 mm dibor pada roda gigi dengan kedalaman 5 mm dengan kedua sisi (bantalan kursi). Roda gigi sekarang dipasang pada bantalan, dan juga dilumasi dengan lithol, dan selama lebih dari enam bulan semuanya telah mengemudi dengan sempurna dalam kondisi apa pun:Tapi saya tidak berhenti sampai disitu, langkah selanjutnya adalah custom gearbox, guna menambah kecepatan hingga 25-30 km / jam.
Ketika semuanya tiba, saya merakit prototipe di lutut saya, ternyata mesin bahkan tanpa beban panas hingga 70 derajat dalam 3-5 menit operasi, saya harus membeli dua pendingin untuk mereka, dan regulator, sebaliknya, tidak memanas bahkan dengan kipas dimatikan (melihat ke depan, mereka juga tidak memanas pada ATV yang sedang dimuat). Karena kami memiliki dua mesin dari dua sisi yang berbeda, itu perlu untuk menyelesaikan masalah lain - motor sentuh berputar hanya dalam satu arah. Awalnya, itu direncanakan untuk membongkar satu motor, dan menghidupkan sensor di dalamnya 180 derajat ... tetapi kenyataannya telah menunjukkan bahwa ini tidak dapat dilakukan dengan sedikit darah. Selain itu, selama percobaan dengan sensor dan timing, salah satu regulator terbakar sebagian, sebagai hasilnya, saya menolak sensor dan menghubungkannya seperti BC biasa. Sensor itu sendiri terdiri dari tiga sensor Hall yang melacak posisi rotor, dan sensor suhu. Diputuskan untuk tidak meninggalkan seluruh ekonomi ini, tetapi untuk menghubungkannya ke MK dan menggunakannya sebagai sensor suhu mesin, sensor kecepatan mesin, dan kemudian,mengetahui rasio roda gigi - dan sebagai sensor kecepatan.Perpustakaan pwmservo agak membingungkan, ia dirancang untuk mengontrol servos (dalam kasus saya, regulator) melalui perangkat keras PWM, dengan akurasi 1 derajat, hanya 180 negara, dan arah "maju" hanya setengah kisaran, mis. 90 negara. Tampak bagi saya bahwa ini tidak cukup, saya harus mengedit perpustakaan dengan merugikan arduin lintas-platform (ternyata hanya untuk pengontrol dengan 16 MHz), hasilnya adalah 1000 negara di setiap arah (unit adalah durasi PWM 0,5 μs, PWM dari 1 hingga 2 ms).Setelah pekerjaan "pada lutut" kurang lebih debugged, semua ekonomi ini dipasang pada sepeda quad:Karena daya ternyata lebih dari 500 W, itu perlu untuk membatasi laju kenaikan gas, jika Anda tajam mengubah gas ke maksimum, daya akan meningkat dengan lancar, dan akan mencapai maksimumnya dalam waktu sekitar 3 detik. Saya yakin bahwa tanpa ini efek rollover instan akan terjadi.Secara umum, ini adalah rekaman video telemetri dari layar ponsel, semuanya terlihat di sana, hanya karena sensor kecepatan yang sedikit tertekuk di mesin kiri (kolom hijau kiri) data kecepatannya sedikit diremehkan, kecepatan maksimum yang dicapai dengan baterai baru adalah 18 km / hNilai kolom: suhu mesin biru dalam derajat, kecepatan mesin hijau dalam rpm, tenaga oranye dipasok ke mesin dalam angka sewenang-wenang dari 0 hingga 1000, posisi abu-abu menangani gas.Dan begini caranya:Saya tidak menyeret saya pergi ... itu macet, tapi saya mengendarai ATV itu sendiri, dan menilai dengan telemetri, dia benar-benar tidak peduli siapa yang ada di atasPada video pertama di awal, sebuah krisis terdengar. Pada malam pertama, gearbox benar-benar rusak. Masalahnya ternyata adalah bahwa gearbox terdiri dari roda gigi nilon yang berputar pada sumbu baja 9 mm tanpa bantalan, sehingga gaya gesekan roda gigi sangat besar sehingga bagian tengah meleleh di roda gigi dan perataannya hilang. Pada gigi lain, gigi dilas ke sumbu, dan sumbu mulai berputar di dalam tubuh dan melelehkannya, sehingga gigi tersebut juga kehilangan arah.Untuk mengatasi masalah ini, kami membutuhkan:Gandar baru berukuran 5 mm, jadi saya harus mencetak busing dengan diameter eksternal 9 mm pada printer 3D, dan bagian dalam 5 mm, untuk memasang kapak baru di kotak gir yang lama, lubang 11 mm dibor pada roda gigi dengan kedalaman 5 mm dengan kedua sisi (bantalan kursi). Roda gigi sekarang dipasang pada bantalan, dan juga dilumasi dengan lithol, dan selama lebih dari enam bulan semuanya telah mengemudi dengan sempurna dalam kondisi apa pun:Tapi saya tidak berhenti sampai disitu, langkah selanjutnya adalah custom gearbox, guna menambah kecepatan hingga 25-30 km / jam.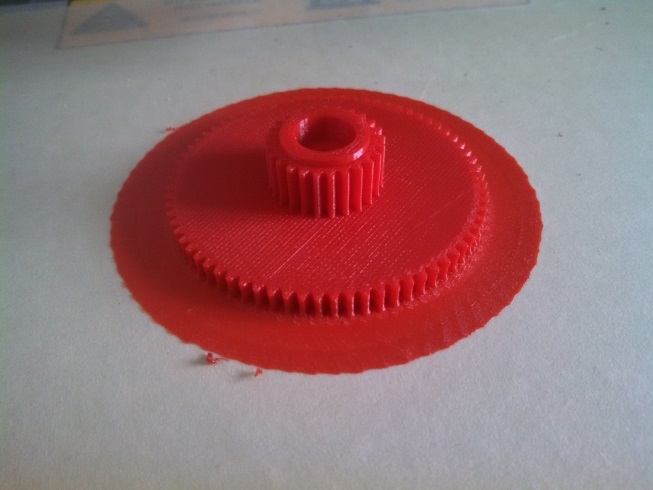 Anak-anak belajar dengan sangat cepat, dan sudah melakukan pekerjaan yang sangat baik untuk memasuki tikungan 90 derajat dengan sedikit pengereman, dan kemudian dengan gas tajam di ujung belokan.Sebuah sketsa, pwmservo library yang dimodifikasi, pinount dapat diunduh di sini , semua ini dalam bentuk konsep, ada banyak kode yang belum selesai dan debugging dalam kode, yang saya minta maaf sebelumnya.
Anak-anak belajar dengan sangat cepat, dan sudah melakukan pekerjaan yang sangat baik untuk memasuki tikungan 90 derajat dengan sedikit pengereman, dan kemudian dengan gas tajam di ujung belokan.Sebuah sketsa, pwmservo library yang dimodifikasi, pinount dapat diunduh di sini , semua ini dalam bentuk konsep, ada banyak kode yang belum selesai dan debugging dalam kode, yang saya minta maaf sebelumnya.Source: https://habr.com/ru/post/id396209/
All Articles