Pergeseran proyek di Pusat Pendidikan Sirius
Pergeseran proyek pertama di Pusat Pendidikan Sirius akan segera berakhir . Biasanya, pergeseran pendidikan diadakan di sini, di mana siswa sekolah mempersiapkan diri untuk olimpiade tingkat semua-Rusia dan dunia. Misalnya, tim ahli matematika mengadakan kamp pelatihan di Sirius sebelum Olimpiade Dunia . Direncanakan di masa depan untuk menjadikan tempat ini salah satu pusat daya tarik utama bagi pemuda berbakat untuk integrasi lebih lanjut ke dalam proyek teknologi tinggi yang menjadi perhatian khusus negara.Tim Universitas ITMOSelain partisipasi luas dalam proyek-proyek yang terkait dengan nanoteknologi, ia bekerja dengan siswa sekolah di beberapa proyek robot. Kelompok kami terdiri dari 19 siswa dan 3 guru. Di muka, kami menentukan teknologi dasar dan fitur desain yang akan diimplementasikan selama proyek. Beberapa proyek difokuskan pada otomatisasi proses tertentu, dan beberapa proyek memiliki komponen visual yang lebih kreatif. Sebagai dasar untuk membuat robot, diputuskan untuk menggunakan desainer robot TRIC . Contoh penggunaan konstruktor ini telah dipublikasikan di sini .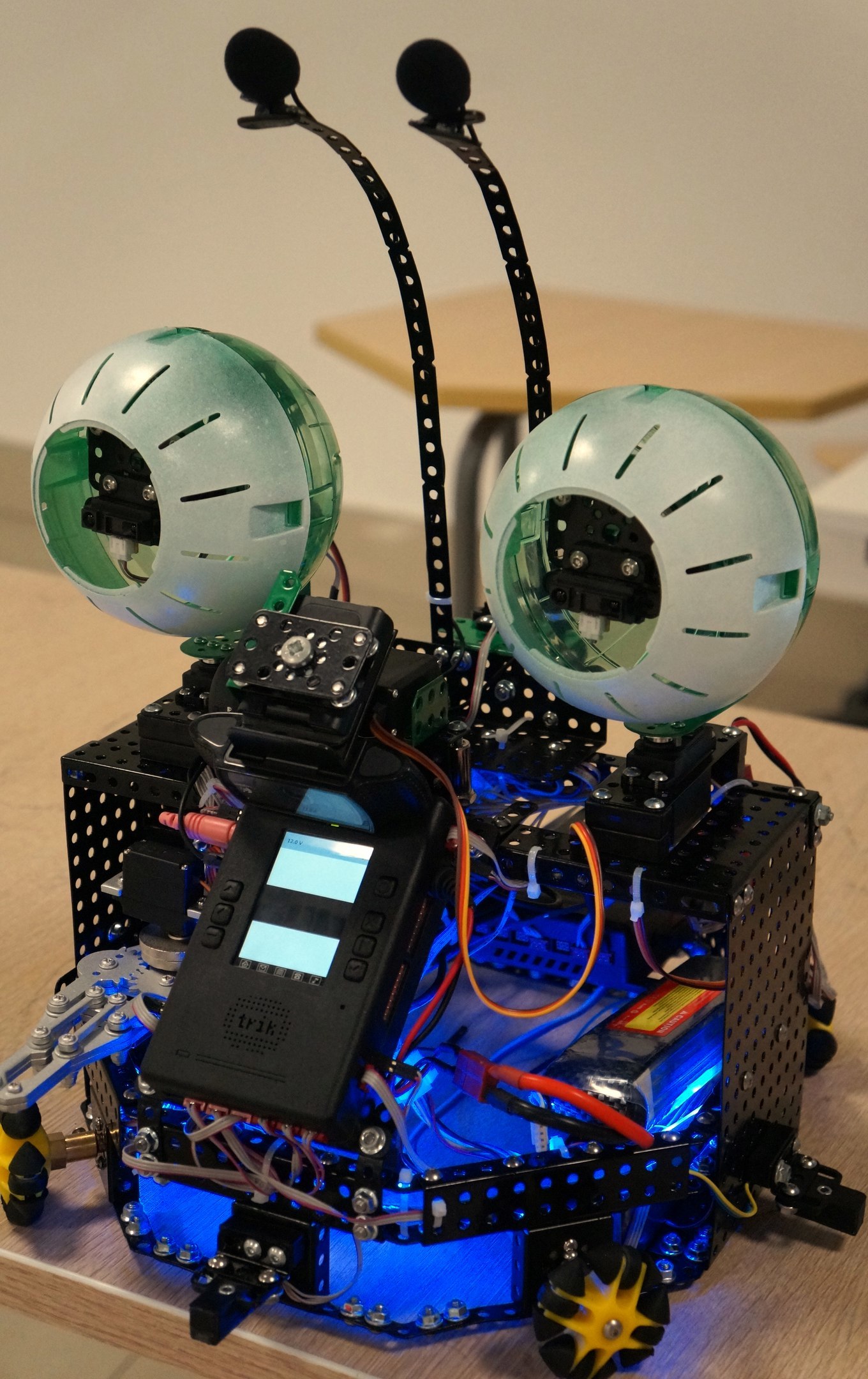 Sejak awal, kami mencoba membagi siswa menjadi beberapa kelompok sesuai dengan keterampilan pemrograman dan desain. Untuk mengatur pekerjaan, kami menggunakan sistem manajemen proyek Trello . Karena dua setengah minggu dialokasikan untuk mengerjakan proyek, sisanya pergi ke acara rekreasi dan organisasi, dan ada sejumlah tugas, Trello cukup senang dengan kami. Setiap tiga hari kami bertemu dengan orang-orang dan mengatur tugas untuk lari baru. Ini bukan untuk mengatakan bahwa ini dilakukan sesuai dengan semua kanon pengembangan di perusahaan yang serius, tetapi kami berhasil memperkenalkan orang-orang pada dasar-dasar manajemen proyek. Selanjutnya, kita langsung menuju proyek.Proyek pertama melibatkan interaksi manusia-robot, baik dari sudut pandang mendesain penampilan robot yang menarik, dan dari sudut pandang berkomunikasi dengan seseorang dan mempertahankan perhatian. Pertama, para pria menemukan menggunakan teknologi pengenalan suara. Yandex SpeechKit digunakan untuk ini , yang memungkinkan melalui permintaan http untuk menerima varian respons dari teks yang dikenali, dalam urutan penurunan probabilitas pengakuan yang benar. Pada pengontrol TRIC sendiri ada sistem unix, dan pengembang telah menyediakan sistem dengan kemampuan untuk mengubah teks menjadi ucapan. Untuk ini , synthesizer ucapan eSpeak dipasang di sistem , yang menyuarakan teks yang diinginkan.Program utama diimplementasikan pada Qt Script dalam sistem TRIK Studiodidukung oleh pengembang perancang, dan bagian dengan transfer file audio ke server Yandex diimplementasikan melalui skrip bash. Oleh karena itu, perlu untuk mentransfer informasi dari ruang kerja linux ke area memori program Script Qt, ini dilakukan melalui file tambahan. Secara umum, robot dapat merekam ucapan Anda, mengirim file untuk pengakuan dan mengucapkan frasa yang terdaftar di database umum permintaan dan jawaban, atau melakukan tindakan tertentu.Selanjutnya, tugasnya adalah memprogram pergerakan robot. Robot memutar matanya ke arah lawan bicara, menarik perhatiannya. Dengan perintah suara, robot dapat mengambil benda menggunakan manipulator. Robot memiliki dua pengontrol di papan: yang pertama mengontrol pergerakan roda, mengambil informasi dari mikrofon dan sensor; yang kedua mentransmisikan gambar video dari kamera, mengontrol manipulator dan gerakan mata, menyalakan strip LED selama pelafalan teks. Ada banyak tugas menyinkronkan pekerjaan program pada pengontrol yang berbeda, sementara semua bagian proyek terhubung satu sama lain melalui TCP / IP. Misalnya, pada satu blok, pelafalan teks harus disertai dengan animasi dari mulut, dan di lain, strip LED harus menyala.Visi teknis robot ditransfer ke komputer terpisah, tempat OpenCV digunakan untuk ini. Pertama, gambar di binarisasi, kemudian gradien ditentukan, kontur bersarang dihapus, dan objek dipilih oleh dimensi dan area geometris. Ini memungkinkan Anda untuk menentukan posisi objek di atas meja, mengirim robot kepada mereka dan mengambilnya dengan manipulator. Semua tugas yang dijelaskan diselesaikan pada berbagai perangkat, orang-orang dalam pertumbuhan penuh menghadapi interaksi jaringan dan berhasil mengatasi tugas ini. Presentasi proyek dapat dilihat di sini .
Sejak awal, kami mencoba membagi siswa menjadi beberapa kelompok sesuai dengan keterampilan pemrograman dan desain. Untuk mengatur pekerjaan, kami menggunakan sistem manajemen proyek Trello . Karena dua setengah minggu dialokasikan untuk mengerjakan proyek, sisanya pergi ke acara rekreasi dan organisasi, dan ada sejumlah tugas, Trello cukup senang dengan kami. Setiap tiga hari kami bertemu dengan orang-orang dan mengatur tugas untuk lari baru. Ini bukan untuk mengatakan bahwa ini dilakukan sesuai dengan semua kanon pengembangan di perusahaan yang serius, tetapi kami berhasil memperkenalkan orang-orang pada dasar-dasar manajemen proyek. Selanjutnya, kita langsung menuju proyek.Proyek pertama melibatkan interaksi manusia-robot, baik dari sudut pandang mendesain penampilan robot yang menarik, dan dari sudut pandang berkomunikasi dengan seseorang dan mempertahankan perhatian. Pertama, para pria menemukan menggunakan teknologi pengenalan suara. Yandex SpeechKit digunakan untuk ini , yang memungkinkan melalui permintaan http untuk menerima varian respons dari teks yang dikenali, dalam urutan penurunan probabilitas pengakuan yang benar. Pada pengontrol TRIC sendiri ada sistem unix, dan pengembang telah menyediakan sistem dengan kemampuan untuk mengubah teks menjadi ucapan. Untuk ini , synthesizer ucapan eSpeak dipasang di sistem , yang menyuarakan teks yang diinginkan.Program utama diimplementasikan pada Qt Script dalam sistem TRIK Studiodidukung oleh pengembang perancang, dan bagian dengan transfer file audio ke server Yandex diimplementasikan melalui skrip bash. Oleh karena itu, perlu untuk mentransfer informasi dari ruang kerja linux ke area memori program Script Qt, ini dilakukan melalui file tambahan. Secara umum, robot dapat merekam ucapan Anda, mengirim file untuk pengakuan dan mengucapkan frasa yang terdaftar di database umum permintaan dan jawaban, atau melakukan tindakan tertentu.Selanjutnya, tugasnya adalah memprogram pergerakan robot. Robot memutar matanya ke arah lawan bicara, menarik perhatiannya. Dengan perintah suara, robot dapat mengambil benda menggunakan manipulator. Robot memiliki dua pengontrol di papan: yang pertama mengontrol pergerakan roda, mengambil informasi dari mikrofon dan sensor; yang kedua mentransmisikan gambar video dari kamera, mengontrol manipulator dan gerakan mata, menyalakan strip LED selama pelafalan teks. Ada banyak tugas menyinkronkan pekerjaan program pada pengontrol yang berbeda, sementara semua bagian proyek terhubung satu sama lain melalui TCP / IP. Misalnya, pada satu blok, pelafalan teks harus disertai dengan animasi dari mulut, dan di lain, strip LED harus menyala.Visi teknis robot ditransfer ke komputer terpisah, tempat OpenCV digunakan untuk ini. Pertama, gambar di binarisasi, kemudian gradien ditentukan, kontur bersarang dihapus, dan objek dipilih oleh dimensi dan area geometris. Ini memungkinkan Anda untuk menentukan posisi objek di atas meja, mengirim robot kepada mereka dan mengambilnya dengan manipulator. Semua tugas yang dijelaskan diselesaikan pada berbagai perangkat, orang-orang dalam pertumbuhan penuh menghadapi interaksi jaringan dan berhasil mengatasi tugas ini. Presentasi proyek dapat dilihat di sini . Proyek kedua adalah robot yang menghapus dari papan. Dalam proyek ini, kami memiliki papan penanda dan robot roda dua yang dapat bergerak di atasnya. Robot pertama menarik dan berdiri di seberang papan. Ada kamera di atasnya, gambar yang ditransmisikan melalui TRIC ke komputer, di mana gambar diproses dan lokasi robot dan tujuannya ditentukan. Robot memiliki tanda oranye dan kuning untuk menentukan lokasi robot. Pertama, kita memilih semua piksel kuning dan oranye dalam gambar, setelah itu kita menentukan area kontinu terbesar dari warna-warna ini dan menemukan pusatnya dengan mana kita dapat menentukan koordinat dan sudut rotasi robot. Selanjutnya, cari gambar Laplacian dan hanya menyisakan area merah dan merah yang perlu dibersihkan. Berjalan melalui seluruh gambar lagikami menemukan titik terdekat dengan robot, yang menjadi sasaran.Hanya jarak dan sudut antara jalur robot dan arah ke target yang dikirim ke robot yang menghapus papan. Dari nilai-nilai ini, tindakan kontrol untuk mesin dihitung, dan robot bergerak menuju target.
Proyek kedua adalah robot yang menghapus dari papan. Dalam proyek ini, kami memiliki papan penanda dan robot roda dua yang dapat bergerak di atasnya. Robot pertama menarik dan berdiri di seberang papan. Ada kamera di atasnya, gambar yang ditransmisikan melalui TRIC ke komputer, di mana gambar diproses dan lokasi robot dan tujuannya ditentukan. Robot memiliki tanda oranye dan kuning untuk menentukan lokasi robot. Pertama, kita memilih semua piksel kuning dan oranye dalam gambar, setelah itu kita menentukan area kontinu terbesar dari warna-warna ini dan menemukan pusatnya dengan mana kita dapat menentukan koordinat dan sudut rotasi robot. Selanjutnya, cari gambar Laplacian dan hanya menyisakan area merah dan merah yang perlu dibersihkan. Berjalan melalui seluruh gambar lagikami menemukan titik terdekat dengan robot, yang menjadi sasaran.Hanya jarak dan sudut antara jalur robot dan arah ke target yang dikirim ke robot yang menghapus papan. Dari nilai-nilai ini, tindakan kontrol untuk mesin dihitung, dan robot bergerak menuju target. Proyek ini juga mencakup pemoles robot. Ketika menerima pesan dari robot pertama, ia mendorong maju jarak yang telah ditentukan dan bergerak di sepanjang area yang telah ditentukan, memutar elemen pembersih di bawahnya. Pada akhir waktu, robot mulai berputar di sekitar porosnya dan mencari tanda oranye. Setelah menemukan, itu mulai bergerak ke arah tanda sampai menempati area yang signifikan dalam gambar dari kamera. Dalam hal ini, pemrosesan gambar dilakukan sepenuhnya pada robot, hanya menerima perintah mulai. Presentasi proyek dapat dilihat di tautan , dan lebih banyak pekerjaan video.
Proyek ini juga mencakup pemoles robot. Ketika menerima pesan dari robot pertama, ia mendorong maju jarak yang telah ditentukan dan bergerak di sepanjang area yang telah ditentukan, memutar elemen pembersih di bawahnya. Pada akhir waktu, robot mulai berputar di sekitar porosnya dan mencari tanda oranye. Setelah menemukan, itu mulai bergerak ke arah tanda sampai menempati area yang signifikan dalam gambar dari kamera. Dalam hal ini, pemrosesan gambar dilakukan sepenuhnya pada robot, hanya menerima perintah mulai. Presentasi proyek dapat dilihat di tautan , dan lebih banyak pekerjaan video.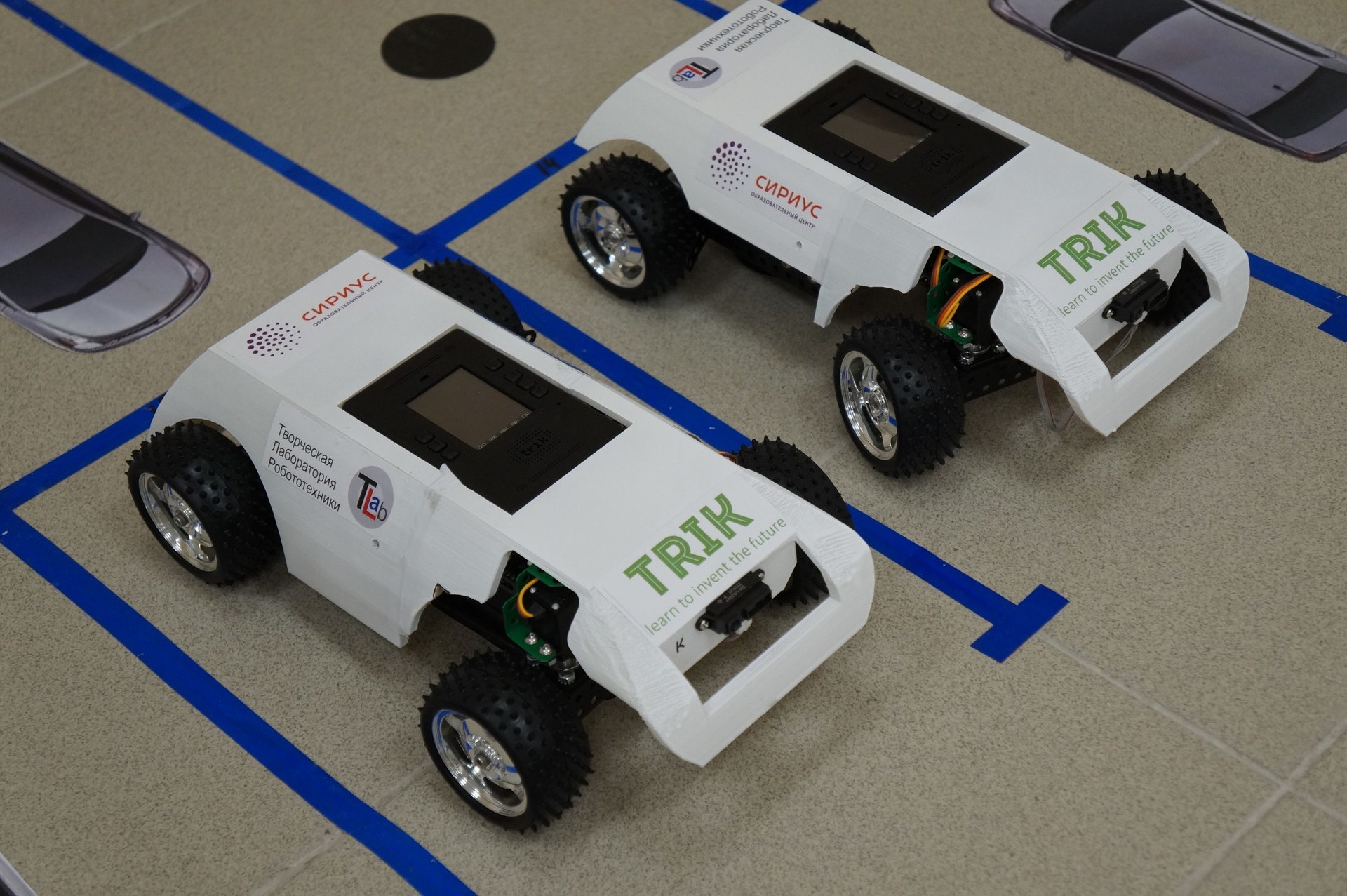 Proyek ketiga berkaitan dengan otomatisasi tempat parkir. Tujuannya adalah untuk membuat prototipe parkir umum otomatis di pusat bisnis. Dua mobil penggerak empat roda dirakit, bangunan itu didirikan dan tempat parkir sendiri dengan tanda (lingkaran hitam). Sistem parkir terdiri dari pengontrol, kamera web dan penghalang yang terhubung dengannya.Pengontrol memiliki inti DSP yang dirancang untuk memproses audio dan video di papan, tetapi karena peserta proyek tidak memiliki pengalaman pemrograman untuk pengendali, diputuskan untuk hanya menyiarkan video, dan memproses keadaan di tempat parkir di komputer.Untuk menentukan ruang parkir gratis, gambar itu binarized, kontur dipilih dan kelebihan elemen dibuang di sepanjang jari-jari lingkaran. Langkah terakhir adalah pengelompokan dengan penomoran.Akibatnya, sistem kerjanya tampak seperti ini:mobil melaju ke penghalang, mengirimkan permintaan ke server, yang, pada gilirannya, mengembalikan jumlah ruang kosong terdekat, dan juga memberi tahu sistem parkir bahwa perlu menaikkan penghalang. Selanjutnya, mobil, memiliki jumlah tempat parkir, bergerak di sepanjang jalan yang direkam. Presentasi proyek dapat dilihat di sini .Semua kode sumber program diposting di github .
Proyek ketiga berkaitan dengan otomatisasi tempat parkir. Tujuannya adalah untuk membuat prototipe parkir umum otomatis di pusat bisnis. Dua mobil penggerak empat roda dirakit, bangunan itu didirikan dan tempat parkir sendiri dengan tanda (lingkaran hitam). Sistem parkir terdiri dari pengontrol, kamera web dan penghalang yang terhubung dengannya.Pengontrol memiliki inti DSP yang dirancang untuk memproses audio dan video di papan, tetapi karena peserta proyek tidak memiliki pengalaman pemrograman untuk pengendali, diputuskan untuk hanya menyiarkan video, dan memproses keadaan di tempat parkir di komputer.Untuk menentukan ruang parkir gratis, gambar itu binarized, kontur dipilih dan kelebihan elemen dibuang di sepanjang jari-jari lingkaran. Langkah terakhir adalah pengelompokan dengan penomoran.Akibatnya, sistem kerjanya tampak seperti ini:mobil melaju ke penghalang, mengirimkan permintaan ke server, yang, pada gilirannya, mengembalikan jumlah ruang kosong terdekat, dan juga memberi tahu sistem parkir bahwa perlu menaikkan penghalang. Selanjutnya, mobil, memiliki jumlah tempat parkir, bergerak di sepanjang jalan yang direkam. Presentasi proyek dapat dilihat di sini .Semua kode sumber program diposting di github . Secara umum, semuanya ternyata cukup baik. Siswa selalu diminta untuk tinggal lebih lama dan menghabiskan lebih banyak waktu mengerjakan proyek, yang menunjukkan minat siswa pada robot.Semua proyek shift dibagi menjadi rekayasa, di mana pekerjaan dilakukan pada implementasi desain tertentu, dan penelitian, di mana data tentang berbagai fenomena dikumpulkan dan dianalisis. Menurut pendapat saya, dalam penilaian akhir perlu memisahkan daerah-daerah seperti itu, sulit untuk membandingkan analisis keadaan Sungai Mzymta dan Tabel Cerdas. Untuk penelitian, format presentasi dan poster lebih cocok, dan untuk proyek, format pameran dengan stan lebih baik.Mereka yang ingin mengambil bagian dalam perubahan semacam itu harus dibuat bingung oleh studi awal yang cermat tentang daerah di mana mereka ingin mengambil bagian. Untuk melakukan ini, ada sejumlah besar kuliah video dan materi pendamping lainnya. Belajarlah untuk menggunakan berbagai sistem manajemen proyek (Anda dapat mulai dengan yang kami gunakan ) dan sistem kontrol versi.Terima kasih banyak kepada semua peserta dari perubahan ini, para organisator dan gurunya. Saya berharap berada di sini lebih dari sekali!
Secara umum, semuanya ternyata cukup baik. Siswa selalu diminta untuk tinggal lebih lama dan menghabiskan lebih banyak waktu mengerjakan proyek, yang menunjukkan minat siswa pada robot.Semua proyek shift dibagi menjadi rekayasa, di mana pekerjaan dilakukan pada implementasi desain tertentu, dan penelitian, di mana data tentang berbagai fenomena dikumpulkan dan dianalisis. Menurut pendapat saya, dalam penilaian akhir perlu memisahkan daerah-daerah seperti itu, sulit untuk membandingkan analisis keadaan Sungai Mzymta dan Tabel Cerdas. Untuk penelitian, format presentasi dan poster lebih cocok, dan untuk proyek, format pameran dengan stan lebih baik.Mereka yang ingin mengambil bagian dalam perubahan semacam itu harus dibuat bingung oleh studi awal yang cermat tentang daerah di mana mereka ingin mengambil bagian. Untuk melakukan ini, ada sejumlah besar kuliah video dan materi pendamping lainnya. Belajarlah untuk menggunakan berbagai sistem manajemen proyek (Anda dapat mulai dengan yang kami gunakan ) dan sistem kontrol versi.Terima kasih banyak kepada semua peserta dari perubahan ini, para organisator dan gurunya. Saya berharap berada di sini lebih dari sekali! Source: https://habr.com/ru/post/id396233/
All Articles