SAW robot merangkak, berebut dan berenang hanya dengan satu mesin
 Jika Anda membutuhkan gerakan, perangkat ini dapat menggunakan roda dan trek, berjalan atau pergi ke tingkat eksotis merangkak dan berenang. Ada banyak cara untuk membuat robot bergerak. Kadang-kadang bahkan tampak tidak ada yang baru yang dapat ditemukan. Tapi ini jauh dari kasus. Dalam sebuah makalah yang baru-baru ini diterbitkan, David Zarruk dari Universitas Ben-Gurion di Negev menggambarkan robot cacing seperti gelombang yang digerakkan oleh hanya satu aktuator.Robot ini disebut: robot mirip gelombang aktuator tunggal atau SAW. Strukturnya yang seperti gelombang mendorongnya maju atau mundur. Untuk belokan Anda memerlukan roda kemudi. Desain seperti itu tidak hanya bergerak dengan baik di darat, tetapi juga bisa memanjat di celah-celah sempit dan berenang di air.Para peneliti mengatakan prinsip merangkak dipinjam dari ular. Meskipun jalannya robot SAW dapat dibandingkan dengan metode pemindahan cacing, analoginya acak. Tubuh cacing tanah diperpanjang di satu bagian karena penipisan. Ujung depan maju, diikuti oleh belakang, yang berkontraksi. Prosesnya berulang. SAW adalah sinusoid di permukaan. Prinsip-prinsip gerakan robot mirip dengan yang digunakan oleh beberapa hewan laut kecil dalam skala yang jauh lebih kecil: organisme mikroskopis mengapung dengan bantuan flagel.Video demonstrasi robot.Minimalis, kemudahan bergerak dan kinerja tinggi - inilah yang sudah lama Zarruk kerjakan. Dalam sebuah wawancara dengan majalah IEEE Spectrum, Zarruk mengatakan bahwa pada tahun 2004, sebagai seorang mahasiswa, ia mencoba menciptakan kembali gerakan gelombang yang mirip dengan apa yang ada dalam organisme hidup. Saat bekerja di doktor, Zarruk datang dengan ide menggunakan gerakan gelombang untuk sistem dalam sistem pencernaan. Sistem sederhana dengan satu motor dapat dikurangi dan digunakan untuk bergerak di dalam usus.Beberapa tahun yang lalu, Zarruk mengajar kursus desain produk dan berbicara tentang mata air. Kemudian ia memperhatikan bahwa dalam satu proyeksi pegas adalah sebuah lingkaran, yang lain adalah sebuah sinusoid. Jika pegas berputar, maka gelombang bergerak tanpa komplikasi. Kesederhanaan prinsip gerak menarik perhatian peneliti. Gambar atas: Motor memutar spiral relatif ke rumahan. Gambar bawah: 25 tautan melingkari spiral, mereka melekat pada tubuh dan tidak berputar.
SAW memiliki satu mesin. Dia memutar tulang belakang robot - spiral yang kaku. Yang terakhir dikelilingi oleh serangkaian tautan yang dicetak pada printer 3D. Tautan ini dapat dipindah dalam satu pesawat, seperti bagian dari rantai sepeda. Spiral berputar, dan tautannya naik dan turun. Pada saat yang sama, tautan bergerak sedemikian rupa sehingga, saat bersentuhan dengan permukaan, mereka mendorong robot ke depan.
Jika Anda membutuhkan gerakan, perangkat ini dapat menggunakan roda dan trek, berjalan atau pergi ke tingkat eksotis merangkak dan berenang. Ada banyak cara untuk membuat robot bergerak. Kadang-kadang bahkan tampak tidak ada yang baru yang dapat ditemukan. Tapi ini jauh dari kasus. Dalam sebuah makalah yang baru-baru ini diterbitkan, David Zarruk dari Universitas Ben-Gurion di Negev menggambarkan robot cacing seperti gelombang yang digerakkan oleh hanya satu aktuator.Robot ini disebut: robot mirip gelombang aktuator tunggal atau SAW. Strukturnya yang seperti gelombang mendorongnya maju atau mundur. Untuk belokan Anda memerlukan roda kemudi. Desain seperti itu tidak hanya bergerak dengan baik di darat, tetapi juga bisa memanjat di celah-celah sempit dan berenang di air.Para peneliti mengatakan prinsip merangkak dipinjam dari ular. Meskipun jalannya robot SAW dapat dibandingkan dengan metode pemindahan cacing, analoginya acak. Tubuh cacing tanah diperpanjang di satu bagian karena penipisan. Ujung depan maju, diikuti oleh belakang, yang berkontraksi. Prosesnya berulang. SAW adalah sinusoid di permukaan. Prinsip-prinsip gerakan robot mirip dengan yang digunakan oleh beberapa hewan laut kecil dalam skala yang jauh lebih kecil: organisme mikroskopis mengapung dengan bantuan flagel.Video demonstrasi robot.Minimalis, kemudahan bergerak dan kinerja tinggi - inilah yang sudah lama Zarruk kerjakan. Dalam sebuah wawancara dengan majalah IEEE Spectrum, Zarruk mengatakan bahwa pada tahun 2004, sebagai seorang mahasiswa, ia mencoba menciptakan kembali gerakan gelombang yang mirip dengan apa yang ada dalam organisme hidup. Saat bekerja di doktor, Zarruk datang dengan ide menggunakan gerakan gelombang untuk sistem dalam sistem pencernaan. Sistem sederhana dengan satu motor dapat dikurangi dan digunakan untuk bergerak di dalam usus.Beberapa tahun yang lalu, Zarruk mengajar kursus desain produk dan berbicara tentang mata air. Kemudian ia memperhatikan bahwa dalam satu proyeksi pegas adalah sebuah lingkaran, yang lain adalah sebuah sinusoid. Jika pegas berputar, maka gelombang bergerak tanpa komplikasi. Kesederhanaan prinsip gerak menarik perhatian peneliti. Gambar atas: Motor memutar spiral relatif ke rumahan. Gambar bawah: 25 tautan melingkari spiral, mereka melekat pada tubuh dan tidak berputar.
SAW memiliki satu mesin. Dia memutar tulang belakang robot - spiral yang kaku. Yang terakhir dikelilingi oleh serangkaian tautan yang dicetak pada printer 3D. Tautan ini dapat dipindah dalam satu pesawat, seperti bagian dari rantai sepeda. Spiral berputar, dan tautannya naik dan turun. Pada saat yang sama, tautan bergerak sedemikian rupa sehingga, saat bersentuhan dengan permukaan, mereka mendorong robot ke depan.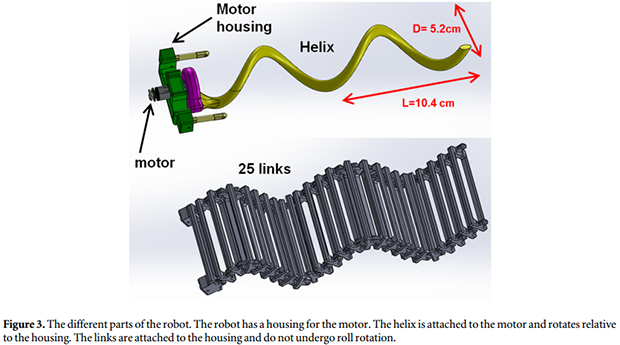
 Gelombang bergerak dari kanan ke kiri, dan tautan yang bersentuhan dengan bumi bergerak sedikit ke kiri dan memutar searah jarum jam.Robot SAW hanya bisa bergerak maju atau mundur. Untuk membalikkan itu cukup untuk memutar spiral ke arah yang berlawanan. Dua roda pada kasing membantunya untuk mengarahkan, yang sebaliknya pasif: mereka tidak memberi daya pada perangkat. Tampaknya satu-satunya cara untuk mempercepat gerakan adalah memutar spiral lebih cepat. Tetapi para peneliti menambahkan gigi pada tautan yang memungkinkan Anda membuat gerakan tujuh gelombang dalam enam siklus. Jadi kecepatannya meningkat 13%. Gigi khusus tidak mengganggu hubungan yang bergerak relatif satu sama lain.
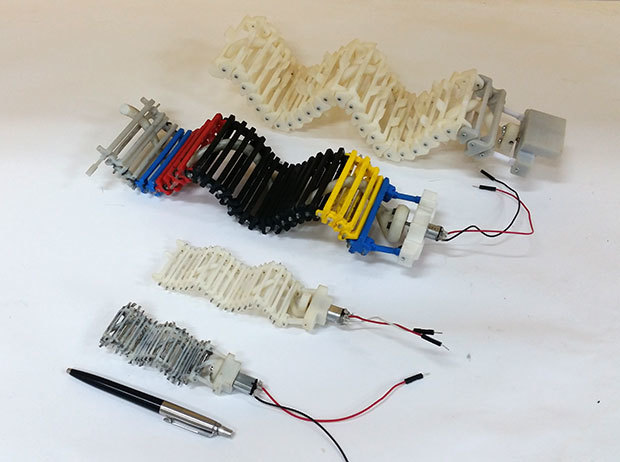
Gelombang bergerak dari kanan ke kiri, dan tautan yang bersentuhan dengan bumi bergerak sedikit ke kiri dan memutar searah jarum jam.Robot SAW hanya bisa bergerak maju atau mundur. Untuk membalikkan itu cukup untuk memutar spiral ke arah yang berlawanan. Dua roda pada kasing membantunya untuk mengarahkan, yang sebaliknya pasif: mereka tidak memberi daya pada perangkat. Tampaknya satu-satunya cara untuk mempercepat gerakan adalah memutar spiral lebih cepat. Tetapi para peneliti menambahkan gigi pada tautan yang memungkinkan Anda membuat gerakan tujuh gelombang dalam enam siklus. Jadi kecepatannya meningkat 13%. Gigi khusus tidak mengganggu hubungan yang bergerak relatif satu sama lain. Itu dibuat beberapa model dengan ukuran berbeda. Terbesar (multi-warna) memiliki kecepatan 5,6 gelombang per detik atau 57 sentimeter per detik. Ia dapat memanjat di antara dua permukaan yang diatur secara sempit pada kecepatan 8 cm / s. Terlampir dalam wadah anti air, model mengapung dengan kecepatan 6 cm / s. SAW bekerja tidak hanya di lantai datar laboratorium, tetapi juga mengatasi medan dan melewati batu dan rumput. MELIHAT bukan hanya mainan. Sekarang telah dikurangi menjadi ukuran pena (sampel terendah dalam foto di atas). Di masa depan, robot dapat miniatur sedemikian rupa sehingga dapat menghilangkan usus manusia dan mengambil sampel untuk biopsi. Upaya pengurangan lebih lanjut sudah berlangsung.Menurut Zarruk, robot hampir tidak memerlukan perawatan, yang tidak biasa untuk struktur dinamis yang diperoleh dari pencetakan 3D. Di masa depan, sistem taksi akan diubah - yang saat ini tidak terlalu elegan. Para peneliti ingin mencoba bergabung dengan dua robot SAW melalui engsel. Dan jika ternyata dengan cepat mengubah frekuensi gelombang dan amplitudonya, maka robot akan dapat beradaptasi dengan lebih baik pada permukaan yang berbeda, menggeliat melalui pipa dengan banyak diameter dan mengoptimalkan gerakan untuk masing-masing fluida.Robot mirip gelombang aktuator tunggal (SAW): desain, pemodelan, dan eksperimen
Itu dibuat beberapa model dengan ukuran berbeda. Terbesar (multi-warna) memiliki kecepatan 5,6 gelombang per detik atau 57 sentimeter per detik. Ia dapat memanjat di antara dua permukaan yang diatur secara sempit pada kecepatan 8 cm / s. Terlampir dalam wadah anti air, model mengapung dengan kecepatan 6 cm / s. SAW bekerja tidak hanya di lantai datar laboratorium, tetapi juga mengatasi medan dan melewati batu dan rumput. MELIHAT bukan hanya mainan. Sekarang telah dikurangi menjadi ukuran pena (sampel terendah dalam foto di atas). Di masa depan, robot dapat miniatur sedemikian rupa sehingga dapat menghilangkan usus manusia dan mengambil sampel untuk biopsi. Upaya pengurangan lebih lanjut sudah berlangsung.Menurut Zarruk, robot hampir tidak memerlukan perawatan, yang tidak biasa untuk struktur dinamis yang diperoleh dari pencetakan 3D. Di masa depan, sistem taksi akan diubah - yang saat ini tidak terlalu elegan. Para peneliti ingin mencoba bergabung dengan dua robot SAW melalui engsel. Dan jika ternyata dengan cepat mengubah frekuensi gelombang dan amplitudonya, maka robot akan dapat beradaptasi dengan lebih baik pada permukaan yang berbeda, menggeliat melalui pipa dengan banyak diameter dan mengoptimalkan gerakan untuk masing-masing fluida.Robot mirip gelombang aktuator tunggal (SAW): desain, pemodelan, dan eksperimenSource: https://habr.com/ru/post/id396323/
All Articles