Panduan untuk membuat tentakel mekanis di rumah: Bagian 1
 Jadi bagaimana kita tidak suka animatronik? Tekuk kulit silikon boneka apa pun, dan Anda akan membuka sekelompok sihir mekatronik, memberikan nyawanya di layar lebar. Saya mencari di internet untuk materi pengantar yang bagus tentang topik ini, tetapi saya hanya menemukan satu - video pendidikan dari Stan Winston . Setelah 30 detik, saya merasakan tentakel membangkitkan hasrat saya yang paling dasar untuk membangun benda-benda nyata. Aku hancur, aku hanya harus membangun satu hal seperti itu ... atau beberapa. Dan inilah cara membuat tentakel animatronik yang sangat nyata.
Jadi bagaimana kita tidak suka animatronik? Tekuk kulit silikon boneka apa pun, dan Anda akan membuka sekelompok sihir mekatronik, memberikan nyawanya di layar lebar. Saya mencari di internet untuk materi pengantar yang bagus tentang topik ini, tetapi saya hanya menemukan satu - video pendidikan dari Stan Winston . Setelah 30 detik, saya merasakan tentakel membangkitkan hasrat saya yang paling dasar untuk membangun benda-benda nyata. Aku hancur, aku hanya harus membangun satu hal seperti itu ... atau beberapa. Dan inilah cara membuat tentakel animatronik yang sangat nyata.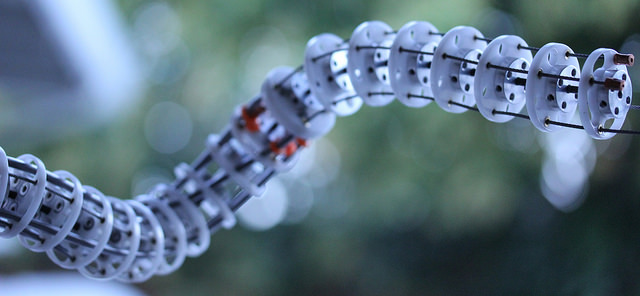 Pemula sebenarnya lebih baik memulai menyelam dengan tutorial Stan Winston. Dalam dua jam, instruktur Richard Landon menggambarkan esensi umum, set komponen yang diperlukan dan teknik untuk membuat mekanisme tentakel menggunakan seperangkat alat khas - belum lagi banyak contoh hebat dari film. [1]Kami juga memiliki kesempatan untuk mengintip ke dunia pembuatan perangkat yang lebih kompleks berdasarkan prinsip yang sama. Saya ingin memulai cerita dari saat itu selesai - dengan tentakel dua tahap membungkuk di 4 sisi. Selain itu, saya akan membuat satu perubahan dalam desain tentakel dari Landon. Ini akan memungkinkan Anda untuk membangun tentakel dan pengontrol Anda sendiri dari hanya beberapa komponen yang sudah jadi, polyformaldehyde [derlin] dan pemotong laser ... Oke, dan dari beberapa bagian yang dicetak pada printer 3D.
Pemula sebenarnya lebih baik memulai menyelam dengan tutorial Stan Winston. Dalam dua jam, instruktur Richard Landon menggambarkan esensi umum, set komponen yang diperlukan dan teknik untuk membuat mekanisme tentakel menggunakan seperangkat alat khas - belum lagi banyak contoh hebat dari film. [1]Kami juga memiliki kesempatan untuk mengintip ke dunia pembuatan perangkat yang lebih kompleks berdasarkan prinsip yang sama. Saya ingin memulai cerita dari saat itu selesai - dengan tentakel dua tahap membungkuk di 4 sisi. Selain itu, saya akan membuat satu perubahan dalam desain tentakel dari Landon. Ini akan memungkinkan Anda untuk membangun tentakel dan pengontrol Anda sendiri dari hanya beberapa komponen yang sudah jadi, polyformaldehyde [derlin] dan pemotong laser ... Oke, dan dari beberapa bagian yang dicetak pada printer 3D.
Bagaimana cara kerja tentakel dua tahap
hackadaycom.files.wordpress.com/2016/08/tentacle_arc_aproximation.pngKedua tahap tentakel, yang masing-masing memiliki dua derajat kebebasan. Tentakel memiliki dua tahap, yang masing-masing memiliki dua derajat kebebasan. Mereka memungkinkan setiap langkah untuk menekuk dalam dua arah tegak lurus. Menggabungkan derajat kebebasan ini, kita mendapatkan empat total, yang memungkinkan kita untuk meniru gerakan organik yang sepenuhnya masuk akal. Melihat animasi, Anda dapat melihat persimpangan dua langkah - kira-kira di tengah tentakel.Dengan perakitan yang baik, kita dapat mengontrol kedua bagian secara independen satu sama lain. Idealnya. Pada kenyataannya, tidak ada yang sempurna, dan materi kami memiliki keterbatasan. Kita perlu bermain dengan ketegangan dan jarak intervertebral sampai kita mencapai hasil yang memuaskan. Idealnya, dengan menarik tali dari salah satu langkah, kita akan mencapai busur yang ideal, mengurangi diameter dengan meningkatnya ketegangan. Tetapi karena kehilangan gesekan di masing-masing vertebra, kita tidak akan dapat mencapai busur ideal, meskipun hasilnya akan cukup baik untuk menipu orang di sisi lain layar.Di antara pose-pose tentakel yang tersedia untuk kita, tidak ada rotasi di sekitar sumbunya. Ini dilakukan dengan sengaja, karena dalang di masa lalu menganggap gerakan seperti itu tidak wajar - misalnya, untuk ekor kucing atau belalai gajah. [1].
Idealnya, dengan menarik tali dari salah satu langkah, kita akan mencapai busur yang ideal, mengurangi diameter dengan meningkatnya ketegangan. Tetapi karena kehilangan gesekan di masing-masing vertebra, kita tidak akan dapat mencapai busur ideal, meskipun hasilnya akan cukup baik untuk menipu orang di sisi lain layar.Di antara pose-pose tentakel yang tersedia untuk kita, tidak ada rotasi di sekitar sumbunya. Ini dilakukan dengan sengaja, karena dalang di masa lalu menganggap gerakan seperti itu tidak wajar - misalnya, untuk ekor kucing atau belalai gajah. [1].Sketsa tentakel
Untuk memahami prinsip operasi, kami akan membangun tentakel kasar dari dua pelat dan inti yang fleksibel. Ini adalah gambar embrio kami: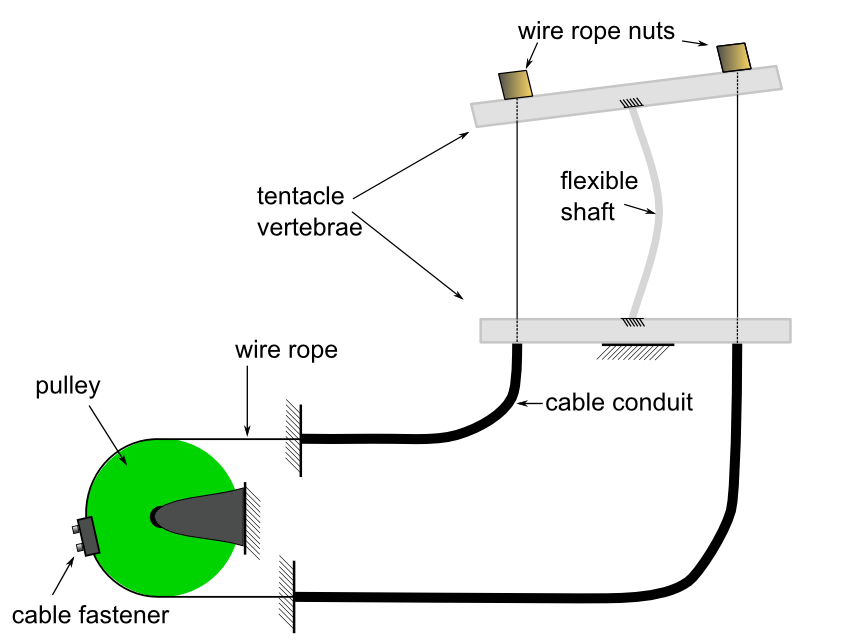 Dengan memberikan rotasi ke katrol, kami melemahkan satu kabel dan menarik yang lainnya pada jarak yang sama. Memperpendek panjang membungkuk tentakel menuju kawat. Karena kabel hanya mengirimkan tegangan, mereka harus dipasangkan dengan yang saling melengkapi untuk memastikan gerakan amplitudo penuh di kedua arah di sepanjang salah satu derajat kebebasan. Karena itu, kita harus bekerja dengan 8 kabel yang berbeda.Tentakel memiliki bentuk karena dua fiturnya. Pertama, saluran kabel menolak kompresi. Kedua, kabel dikencangkan dan terhubung dengan kaku ke katrol. Mengubah panjang kabel adalah satu-satunya cara untuk memindahkan vertebra, dan saluran kabel tidak mengubah panjangnya. Oleh karena itu, fiksasi katrol juga memperbaiki tentakel.
Dengan memberikan rotasi ke katrol, kami melemahkan satu kabel dan menarik yang lainnya pada jarak yang sama. Memperpendek panjang membungkuk tentakel menuju kawat. Karena kabel hanya mengirimkan tegangan, mereka harus dipasangkan dengan yang saling melengkapi untuk memastikan gerakan amplitudo penuh di kedua arah di sepanjang salah satu derajat kebebasan. Karena itu, kita harus bekerja dengan 8 kabel yang berbeda.Tentakel memiliki bentuk karena dua fiturnya. Pertama, saluran kabel menolak kompresi. Kedua, kabel dikencangkan dan terhubung dengan kaku ke katrol. Mengubah panjang kabel adalah satu-satunya cara untuk memindahkan vertebra, dan saluran kabel tidak mengubah panjangnya. Oleh karena itu, fiksasi katrol juga memperbaiki tentakel.Peran saluran kabel
Saluran kabel memainkan peran penting dalam proyek. Tanpanya, pergerakan tingkat atas akan mengarah pada gerakan parasit tingkat bawah, dan kita tidak membutuhkan ini. Kita perlu mengontrol kedua langkah secara mandiri.Saluran kabel memungkinkan Anda untuk mengarahkan kembali penerapan gaya dari satu ujung saluran ke yang lain tanpa munculnya pengaruh palsu. Saluran harus tetap fleksibel saat menahan kompresi.Sangat menarik bahwa dalam skema kami, kami dapat mengambil titik apa pun pada saluran kabel dan memindahkannya tanpa hambatan, karena:1. Saluran tersebut fleksibel.2. Bagian tengahnya, sepanjang kabel itu pergi, tidak mengubah panjangnya.Tekuk saluran tidak mengubah panjangnya, jadi kami bisa menekuknya sesuka Anda, dan tentakel akan tetap tidak bergerak. Dengan nyaman!Ini memungkinkan kita untuk melakukan dua hal sekaligus: rentangkan kabel yang mengendalikan tahap atas melalui tahap bawah, dan mengontrol tahap atas melalui yang lebih rendah, tanpa mempengaruhi yang terakhir.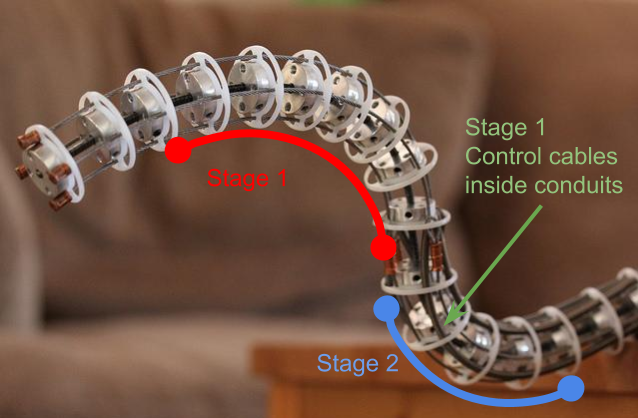 Gambar menunjukkan bahwa kabel yang mengendalikan tahap 1 melewati tahap 2.
Gambar menunjukkan bahwa kabel yang mengendalikan tahap 1 melewati tahap 2.Suku Cadang
Bahan utama
 Gerakan halus sepanjang semua derajat kebebasan dicapai dengan membangun tentakel dari bahan yang menahan rotasi di sekitar sumbunya. Kebanyakan orang menggunakan kabel untuk spedometer dari mobil tua yang memiliki properti ini. [1] Saya juga menggunakan kabel seperti itu untuk pertama kalinya. Sayangnya, diameternya hanya satu: 0,125 inci, itulah sebabnya tidak mungkin membuat boneka besar yang tidak bengkok karena beratnya sendiri. Sekarang saya lebih suka poros fleksibel dari alat memutar . Tetapi sebagian besar gambar dalam artikel ini dibuat menggunakan kabel speedometer.
Gerakan halus sepanjang semua derajat kebebasan dicapai dengan membangun tentakel dari bahan yang menahan rotasi di sekitar sumbunya. Kebanyakan orang menggunakan kabel untuk spedometer dari mobil tua yang memiliki properti ini. [1] Saya juga menggunakan kabel seperti itu untuk pertama kalinya. Sayangnya, diameternya hanya satu: 0,125 inci, itulah sebabnya tidak mungkin membuat boneka besar yang tidak bengkok karena beratnya sendiri. Sekarang saya lebih suka poros fleksibel dari alat memutar . Tetapi sebagian besar gambar dalam artikel ini dibuat menggunakan kabel speedometer.Segmen
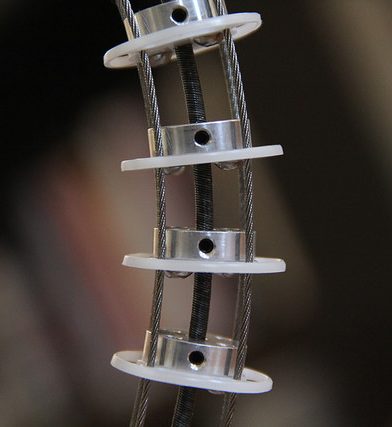
 Setiap segmen tulang belakang harus diperbaiki dengan kuat agar tidak tergelincir dan berputar. Mereka harus memandu kabel dengan benar, dan di tempat yang tepat - saluran kabel, sambil terhubung dengan kuat ke kabel speedometer. Landon menggunakan bagian aluminium yang dibuat pada mesin CNC untuk ini. Tapi saya, mencari-cari di toko-toko, menemukan cara yang lebih sederhana menggunakan komponen yang sudah jadi. Saat ini, suku cadang untuk robot sangat populer karena prevalensi hobi ini, dan saya dapat membuat tulang belakang dari lengan universal dari Pololu [Pusat Pemasangan Aluminium Universal Pololu] dan pelat dari polyformaldehyde [derlin].
Setiap segmen tulang belakang harus diperbaiki dengan kuat agar tidak tergelincir dan berputar. Mereka harus memandu kabel dengan benar, dan di tempat yang tepat - saluran kabel, sambil terhubung dengan kuat ke kabel speedometer. Landon menggunakan bagian aluminium yang dibuat pada mesin CNC untuk ini. Tapi saya, mencari-cari di toko-toko, menemukan cara yang lebih sederhana menggunakan komponen yang sudah jadi. Saat ini, suku cadang untuk robot sangat populer karena prevalensi hobi ini, dan saya dapat membuat tulang belakang dari lengan universal dari Pololu [Pusat Pemasangan Aluminium Universal Pololu] dan pelat dari polyformaldehyde [derlin].Kabel kontrol
 Ambil kabel kontrol sama seperti pada sepeda, tetapi kenyataannya lebih tipis. Saya telah berhasil menggunakan dua diameter kabel - 1,2 mm dan 0,8 mm. Anda dapat menggunakan kabel mahal, yang diproses sedemikian rupa sehingga tidak bercukur, atau cukup pijar ujung kabel yang dipangkas sampai bercahaya. [3]
Ambil kabel kontrol sama seperti pada sepeda, tetapi kenyataannya lebih tipis. Saya telah berhasil menggunakan dua diameter kabel - 1,2 mm dan 0,8 mm. Anda dapat menggunakan kabel mahal, yang diproses sedemikian rupa sehingga tidak bercukur, atau cukup pijar ujung kabel yang dipangkas sampai bercahaya. [3]Saluran kabel
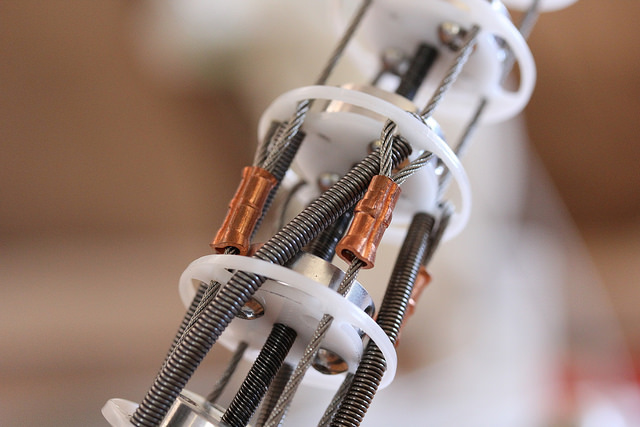
Ada banyak pilihan untuk saluran - tabung nilon, kepang dari sepeda, pegas. Yang kami butuhkan hanyalah saluran untuk menahan kompresi dan fleksibel. Perlawanan terhadap kompresi harus memberikan kekuatan yang "sama dan berlawanan" untuk bergerak. Diperlukan fleksibilitas agar saluran tidak mengganggu bagian lain dari tentakel untuk ditekuk. Untuk mekanisme satu tahap, salah satu opsi yang tercantum cocok. Untuk fleksibilitas multi-tahap lebih penting. Sejauh ini, dalam pengalaman saya, pegas tarik paling cocok sebagai yang paling fleksibel dari semua material.Anda dapat membeli apa pun di toko McMaster-Carr jika Anda tahu nama yang tepat. Saluran kabel kami disebut "pegas ekstensi panjang kontinu" ( 9664K12 ) dan biaya hanya $ 4,40 per 36 inci. [300 gosok / m]Mata air yang lebih kecil dapat dipesan dari Dr. Dan Co Templeman . Biaya mata air akan lebih besar, tetapi bermacam-macam lebih kaya. Diameter sangat kecil dapat ditemukan di Molex .
Diperlukan fleksibilitas agar saluran tidak mengganggu bagian lain dari tentakel untuk ditekuk. Untuk mekanisme satu tahap, salah satu opsi yang tercantum cocok. Untuk fleksibilitas multi-tahap lebih penting. Sejauh ini, dalam pengalaman saya, pegas tarik paling cocok sebagai yang paling fleksibel dari semua material.Anda dapat membeli apa pun di toko McMaster-Carr jika Anda tahu nama yang tepat. Saluran kabel kami disebut "pegas ekstensi panjang kontinu" ( 9664K12 ) dan biaya hanya $ 4,40 per 36 inci. [300 gosok / m]Mata air yang lebih kecil dapat dipesan dari Dr. Dan Co Templeman . Biaya mata air akan lebih besar, tetapi bermacam-macam lebih kaya. Diameter sangat kecil dapat ditemukan di Molex .Tekuk titik
 Untuk pertama kalinya, agak sulit bagi saya untuk membayangkan desain elemen ini. Namun demikian, setelah memahami lokasi ujung kabel, bagian ini mudah dibangun. Setiap kabel yang mengontrol bagian bawah berakhir dalam satu lingkaran. Pada vertebra yang sama, saluran kabel berakhir, berisi set kabel kontrol berikut. Dari sana, set kabel berikutnya berlanjut.
Untuk pertama kalinya, agak sulit bagi saya untuk membayangkan desain elemen ini. Namun demikian, setelah memahami lokasi ujung kabel, bagian ini mudah dibangun. Setiap kabel yang mengontrol bagian bawah berakhir dalam satu lingkaran. Pada vertebra yang sama, saluran kabel berakhir, berisi set kabel kontrol berikut. Dari sana, set kabel berikutnya berlanjut.Desain alternatif
Bisakah kita menggunakan bahan lain untuk tulang belakang, misalnya, kayu - untuk menghemat bushing logam? Mungkin, tetapi desain seperti itu dibuat tidak hanya seperti itu, tetapi dengan perhitungan.Pertama, kompleksitas desain harus diimbangi dengan komponen jadi atau metode pembuatan yang terjangkau (pemotong laser dan printer 3D). Oleh karena itu, bahkan orang dengan mata dan ketangkasan atipikal dapat membuat desain seperti itu.Kedua, teknologi pembuatan prototipe harus deterministik dan berulang. Perangkat harus berperilaku sama, diproduksi di bagian mana pun di dunia. Tidak perlu berlatih sihir dan berdoa kepada para dewa lem, berdiri dengan satu kaki, sementara epoksi Anda mengeras pada tingkat kelembaban yang tidak biasa. Teknologi sederhana yang berperilaku sama di mana-mana dan selalu.Tapi cari alternatif desain sendiri. Saya menyelesaikan controller dan tentakel, tetapi ini tidak berarti bahwa pekerjaan selesai. Pada saat bagian ketiga artikel selesai, semua pengembangan akan ada di tangan Anda, dan Anda dapat melakukan apa pun yang Anda inginkan dengannya.Bagian 2Referensi
[1] Dasar-Dasar Mekanisme Kabel Stan WinstonTutorial mendetail tentang cara membuat tentakel sederhana[2] Demo Animatronics dengan Rick Lazzarini 1:21:01Contoh penggunaan kabel speedometer[3] CS235: Desain Robot Terapan, Kuliah 7-Pengantar Transmisi KabelPendahuluan tentang penggunaan kabel dalam robotikaSource: https://habr.com/ru/post/id398165/
All Articles