Robot masa depan akan belajar melalui rasa ingin tahu dan penentuan tujuan
 Bayangkan seorang teman meminta Anda untuk membantu membersihkan kamarnya, penuh dengan berbagai hal dan perabot. Tetapi bayangkan juga bahwa dia tidak akan membantu Anda dengan ini, tetapi cukup jelaskan kepada Anda, tunjukkan foto-foto itu, bagaimana ia ingin kamarnya terlihat pada akhirnya. Tugas itu mungkin tampak membosankan, tetapi siapa pun dari kita akan mengatasinya. Sebagai anak-anak, kami menemukan benda-benda baru, belajar mengenalinya dan mengembangkan keterampilan dalam menanganinya. Didorong oleh rasa ingin tahu, kami secara bertahap mengembangkan pengetahuan visual, perhatian dan sensorik-motorik, memungkinkan kita, orang dewasa, untuk memperlakukan lingkungan fisik kita sesuai pilihan kita.Robot hari ini tidak disesuaikan untuk tugas seperti itu. Bayangkan sebuah robot humanoid membantu merapikan ruangan. Misalkan Anda menunjukkan robot sebuah ruangan dalam keadaan normal, dibersihkan, dan ketika ada kekacauan di dalamnya, Anda memesan robot untuk menghapusnya ke keadaan semula. Dalam kondisi seperti itu, akan sangat melelahkan untuk mengajarkan robot ke mana harus mengarahkan perhatian dan bagaimana menangani masing-masing objek untuk meletakkannya di posisi yang tepat di tempat yang tepat, atau bagaimana membangun urutan tindakan.Dan meskipun robot baru yang kompleks dan algoritme canggih muncul setiap tahun, melakukan tugas yang rumit dan menemukan solusi yang tidak diketahui untuk tugas yang berbeda memerlukan pemrograman detail yang membosankan terkait dengan keterampilan motorik tingkat rendah. Paling-paling, robot dapat mempelajari serangkaian tindakan tidak fleksibel. Membandingkan pencapaian AI saat ini dengan kecerdasan biologis, kita akan melihat bahwa AI masih memiliki keterbatasan dalam otonomi dan fleksibilitas.Robot masa depan perlu dapat belajar untuk memahami secara mandiri lingkungan mereka, yaitu, secara mandiri menentukan tujuan dan secara efektif memperoleh keterampilan untuk mencapainya, berdasarkan perolehan, modifikasi, generalisasi, dan rekombinasi pengetahuan dan keterampilan yang sebelumnya diperoleh. Ini akan memungkinkan mereka, dengan sedikit pelatihan ekstra, untuk mengubah lingkungan mereka dari keadaan saat ini ke berbagai keadaan akhir yang ditetapkan sebagai tujuan oleh pengguna. Pertanyaannya adalah, bagaimana kita bisa membuat robot masa depan yang dapat mengatasi tugas seperti itu?
Bayangkan seorang teman meminta Anda untuk membantu membersihkan kamarnya, penuh dengan berbagai hal dan perabot. Tetapi bayangkan juga bahwa dia tidak akan membantu Anda dengan ini, tetapi cukup jelaskan kepada Anda, tunjukkan foto-foto itu, bagaimana ia ingin kamarnya terlihat pada akhirnya. Tugas itu mungkin tampak membosankan, tetapi siapa pun dari kita akan mengatasinya. Sebagai anak-anak, kami menemukan benda-benda baru, belajar mengenalinya dan mengembangkan keterampilan dalam menanganinya. Didorong oleh rasa ingin tahu, kami secara bertahap mengembangkan pengetahuan visual, perhatian dan sensorik-motorik, memungkinkan kita, orang dewasa, untuk memperlakukan lingkungan fisik kita sesuai pilihan kita.Robot hari ini tidak disesuaikan untuk tugas seperti itu. Bayangkan sebuah robot humanoid membantu merapikan ruangan. Misalkan Anda menunjukkan robot sebuah ruangan dalam keadaan normal, dibersihkan, dan ketika ada kekacauan di dalamnya, Anda memesan robot untuk menghapusnya ke keadaan semula. Dalam kondisi seperti itu, akan sangat melelahkan untuk mengajarkan robot ke mana harus mengarahkan perhatian dan bagaimana menangani masing-masing objek untuk meletakkannya di posisi yang tepat di tempat yang tepat, atau bagaimana membangun urutan tindakan.Dan meskipun robot baru yang kompleks dan algoritme canggih muncul setiap tahun, melakukan tugas yang rumit dan menemukan solusi yang tidak diketahui untuk tugas yang berbeda memerlukan pemrograman detail yang membosankan terkait dengan keterampilan motorik tingkat rendah. Paling-paling, robot dapat mempelajari serangkaian tindakan tidak fleksibel. Membandingkan pencapaian AI saat ini dengan kecerdasan biologis, kita akan melihat bahwa AI masih memiliki keterbatasan dalam otonomi dan fleksibilitas.Robot masa depan perlu dapat belajar untuk memahami secara mandiri lingkungan mereka, yaitu, secara mandiri menentukan tujuan dan secara efektif memperoleh keterampilan untuk mencapainya, berdasarkan perolehan, modifikasi, generalisasi, dan rekombinasi pengetahuan dan keterampilan yang sebelumnya diperoleh. Ini akan memungkinkan mereka, dengan sedikit pelatihan ekstra, untuk mengubah lingkungan mereka dari keadaan saat ini ke berbagai keadaan akhir yang ditetapkan sebagai tujuan oleh pengguna. Pertanyaannya adalah, bagaimana kita bisa membuat robot masa depan yang dapat mengatasi tugas seperti itu?TUJUAN-Proyek Robot
Dalam mencari jawaban untuk pertanyaan ini, sebuah proyek yang penting untuk penggunaan AI diluncurkan - proyek Eropa, diawasi oleh Laboratorium Neuroscience Embodied Komputasi , LOCEN, sebuah kelompok penelitian Italia yang berbasis di Institute of Cognitive Sciences and Technology, yang dimiliki oleh penelitian negara Italia Komite ( ISTC-CNR ).Proyek GOAL-Robots - Goal-based Autonomous Learning Robots berbasis Goal menempati urutan pertama dalam daftar 11 proyek yang menerima dana di antara 800 peserta konferensi panggilan EU FET-OPEN(Future Emergent Technologies), dan merupakan bagian dari program penelitian EU Horizon 2020. LOCEN dan penasihat akademisnya, Gianluca Baldassarre, akan mengoordinasikan konsorsium yang akan mencakup tiga kelompok penelitian Eropa yang lebih penting:1. Laboratorium Psikologi dan Persepsi (LPP) dari Prancis, dipimpin oleh Kevin O'Regan, yang bekerja di Institut Neurologi dan Ilmu Kognitif Paris. bernama Descartes, akan melakukan eksperimen terkait dengan perolehan keterampilan dan tujuan pada anak.2. Institut Frankfurt untuk Studi Lanjut (FIAS) di Jerman, di bawah kepemimpinan Jochen Triesch, akan fokus pada pengembangan sistem visual dan keterampilan motorik yang mirip dengan yang biologis.3.Sebuah tim ahli robotika yang dipimpin oleh Jan Peters, Universitas Teknologi Darmstadt (TUDa) di Jerman, akan mendemonstrasikan robot untuk proyek tersebut.TUJUAN-Robot mengikuti proyek Eropa sebelumnya IM-CLeVeR ("robot yang secara kumulatif belajar universal robot termotivasi secara internal"), di mana LOCEN dan mitra sebelumnya mempelajari peran motivasi intrinsik (VM) dalam mendorong belajar mandiri pada organisme hidup dan dalam robot. Penelitian VM dimulai dengan mengamati bagaimana rasa ingin tahu anak-anak mengeksplorasi dan berinteraksi dengan dunia luar, mendapatkan pengetahuan tentang cara kerja, dan mendapatkan daftar besar keterampilan motorik indera untuk berinteraksi dengan mereka.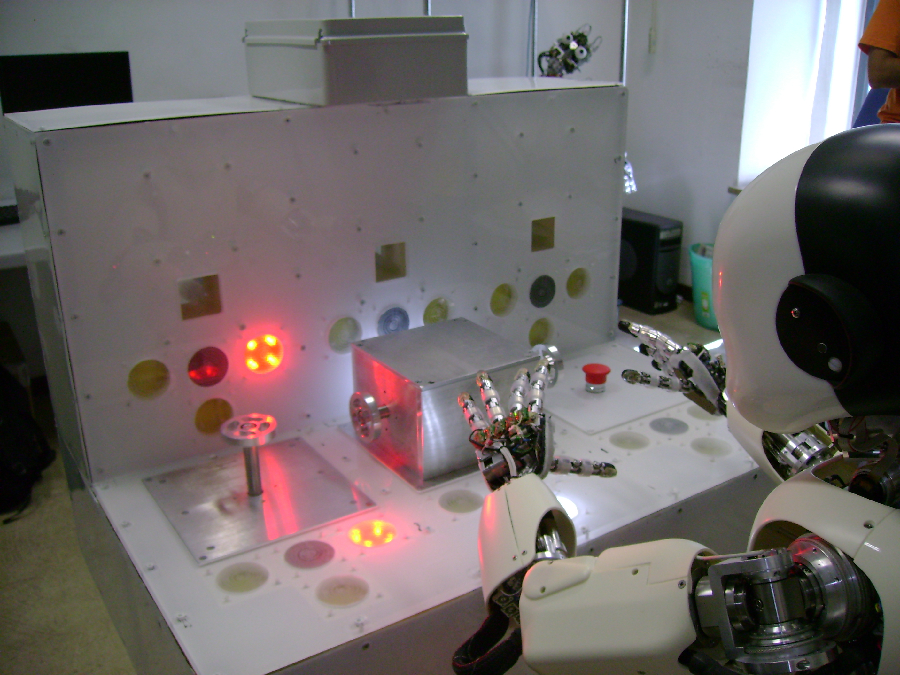 Jika keingintahuan dan VM adalah dasar universalitas manusia dan kemampuan beradaptasi, AI dengan arsitektur dan algoritma meniru VM dapat membantu menciptakan "mesin motivasi" yang akan memandu robot melalui proses pembelajaran terbuka otonom yang tidak memerlukan pemrograman terus-menerus dan pelatihan manusia.TUJUAN-Robot juga menambahkan komponen penting untuk pengembangan pelatihan robot terbuka: tujuan. Tujuan adalah representasi internal seseorang tentang dunia, keadaan tubuh atau peristiwa, atau serangkaian peristiwa, yang memiliki dua sifat penting. Pertama, seseorang dapat menyebabkan gagasan ini bahkan tanpa adanya persepsi tentang keadaan dunia atau peristiwa yang terkait. Kedua, tantangan ini memiliki efek motivasi, yaitu, dapat memengaruhi pilihan, pemusatan kepribadian dan perilaku, dan memimpin proses pembelajarannya untuk mencapai tujuan. Kemampuan untuk menciptakan tujuan motivasi sesuka hati, meskipun abstrak, dan penggunaannya untuk memilih tindakan dan pelatihan, adalah elemen kunci dari fleksibilitas perilaku dan kemampuan untuk melatih individu biologis. Peserta proyek percayabahwa menyediakan robot dengan mekanisme yang cocok untuk pembentukan dan mengejar tujuan pelatihan akan secara radikal meningkatkan potensi mereka untuk belajar mandiri.
Jika keingintahuan dan VM adalah dasar universalitas manusia dan kemampuan beradaptasi, AI dengan arsitektur dan algoritma meniru VM dapat membantu menciptakan "mesin motivasi" yang akan memandu robot melalui proses pembelajaran terbuka otonom yang tidak memerlukan pemrograman terus-menerus dan pelatihan manusia.TUJUAN-Robot juga menambahkan komponen penting untuk pengembangan pelatihan robot terbuka: tujuan. Tujuan adalah representasi internal seseorang tentang dunia, keadaan tubuh atau peristiwa, atau serangkaian peristiwa, yang memiliki dua sifat penting. Pertama, seseorang dapat menyebabkan gagasan ini bahkan tanpa adanya persepsi tentang keadaan dunia atau peristiwa yang terkait. Kedua, tantangan ini memiliki efek motivasi, yaitu, dapat memengaruhi pilihan, pemusatan kepribadian dan perilaku, dan memimpin proses pembelajarannya untuk mencapai tujuan. Kemampuan untuk menciptakan tujuan motivasi sesuka hati, meskipun abstrak, dan penggunaannya untuk memilih tindakan dan pelatihan, adalah elemen kunci dari fleksibilitas perilaku dan kemampuan untuk melatih individu biologis. Peserta proyek percayabahwa menyediakan robot dengan mekanisme yang cocok untuk pembentukan dan mengejar tujuan pelatihan akan secara radikal meningkatkan potensi mereka untuk belajar mandiri.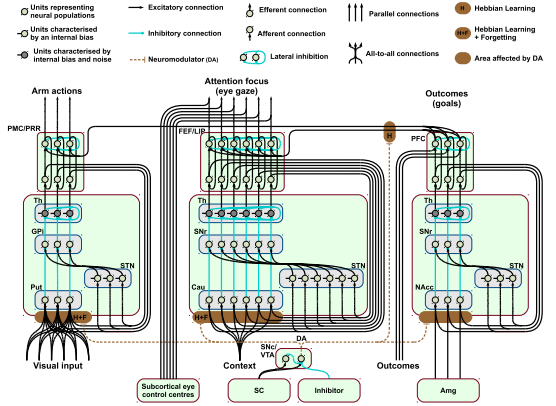
Tugas dan gagasan
Gagasan proyek adalah kombinasi dari mekanisme yang berkaitan dengan VM dan memotivasi tujuan kekuasaan. Secara khusus, VM akan merangsang robot untuk secara mandiri menemukan peristiwa menarik baru yang telah terjadi karena tindakan mereka sendiri. Robot akan menjelajahi lingkungan mereka di bawah pengaruh rasa ingin tahu dan untuk secara mandiri menetapkan tujuan yang semakin kompleks, dan menggunakannya untuk mendapatkan berbagai keterampilan dengan gaya terbuka. Proses terbuka untuk memperoleh kemampuan membutuhkan mekanisme yang kompleks dan integrasi berbagai komponen arsitektur. Secara khusus, robot akan perlu untuk memperoleh keterampilan baru tanpa merusak keterampilan yang diperoleh sebelumnya, dan pada saat yang sama, menggunakan kembali keterampilan yang diperoleh sebelumnya untuk mempercepat perolehan yang baru (transfer pengetahuan). Selain itu, mereka perlu belajar bagaimana menggabungkan keterampilan yang diperoleh sebelumnya untuk membuat keterampilan yang lebih kompleks. Ini adalah tantangan AI yang paling penting untuk saat ini. Untuk menyelesaikannya, proyek akan menggunakan algoritma canggih baik untuk memproses informasi sensorik (misalnya, menggunakan jaringan pembelajaran mendalam) dan untuk mengatur dan menggunakan pengetahuan yang terkait dengan keterampilan motorik (misalnya, menggunakan primitif gerakan dinamis dan jaringan saraf dengan efek gema [gema jaringan saraf-negara]).Semua mekanisme yang terkait dengan bagian proses pembelajaran yang berbeda perlu diintegrasikan dalam satu arsitektur kontrol: proses pembentukan tujuan tingkat tinggi akan dikombinasikan dengan lapisan motivasi di mana, berdasarkan VM, robot akan membentuk dan memilih tujuan. Tujuan akan secara bertahap dikaitkan dengan tingkat yang lebih rendah dari pengontrol sehingga robot dapat menarik kembali keterampilan yang diperoleh untuk mencapai tujuan yang diinginkan dan membangun keterampilan yang lebih kompleks berdasarkan pada kombinasi yang sebelumnya. Transfer pengetahuan antara keterampilan yang berbeda akan diintegrasikan dengan mempertimbangkan kebutuhan untuk menghilangkan campur tangan timbal balik, dan sebagainya. Mekanisme ini bermanfaat tidak hanya untuk fase belajar mandiri, tetapi juga untuk kemungkinan menggunakan pengetahuan yang diperoleh oleh pengguna.
Proses terbuka untuk memperoleh kemampuan membutuhkan mekanisme yang kompleks dan integrasi berbagai komponen arsitektur. Secara khusus, robot akan perlu untuk memperoleh keterampilan baru tanpa merusak keterampilan yang diperoleh sebelumnya, dan pada saat yang sama, menggunakan kembali keterampilan yang diperoleh sebelumnya untuk mempercepat perolehan yang baru (transfer pengetahuan). Selain itu, mereka perlu belajar bagaimana menggabungkan keterampilan yang diperoleh sebelumnya untuk membuat keterampilan yang lebih kompleks. Ini adalah tantangan AI yang paling penting untuk saat ini. Untuk menyelesaikannya, proyek akan menggunakan algoritma canggih baik untuk memproses informasi sensorik (misalnya, menggunakan jaringan pembelajaran mendalam) dan untuk mengatur dan menggunakan pengetahuan yang terkait dengan keterampilan motorik (misalnya, menggunakan primitif gerakan dinamis dan jaringan saraf dengan efek gema [gema jaringan saraf-negara]).Semua mekanisme yang terkait dengan bagian proses pembelajaran yang berbeda perlu diintegrasikan dalam satu arsitektur kontrol: proses pembentukan tujuan tingkat tinggi akan dikombinasikan dengan lapisan motivasi di mana, berdasarkan VM, robot akan membentuk dan memilih tujuan. Tujuan akan secara bertahap dikaitkan dengan tingkat yang lebih rendah dari pengontrol sehingga robot dapat menarik kembali keterampilan yang diperoleh untuk mencapai tujuan yang diinginkan dan membangun keterampilan yang lebih kompleks berdasarkan pada kombinasi yang sebelumnya. Transfer pengetahuan antara keterampilan yang berbeda akan diintegrasikan dengan mempertimbangkan kebutuhan untuk menghilangkan campur tangan timbal balik, dan sebagainya. Mekanisme ini bermanfaat tidak hanya untuk fase belajar mandiri, tetapi juga untuk kemungkinan menggunakan pengetahuan yang diperoleh oleh pengguna. Setiap tahun, proyek akan menghadirkan "robot percontohan," dan platform robot yang kompleks (seperti iCub atau Kuka) akan digerakkan oleh arsitektur yang dikembangkan dalam proyek untuk menyelesaikan masalah meningkatnya kompleksitas. Para demonstran ini tidak hanya akan menunjukkan kemajuan dalam proyek, tetapi juga akan menjadi kriteria untuk membandingkan kemajuan dalam pengembangan robot independen.Demonstrator terakhir harus menghadapi tugas yang dirumuskan pada awal artikel: apakah mungkin bagi robot untuk menunjukkan universalitas dan kemampuan beradaptasi yang serupa dengan manusia, berinteraksi dengan dunia nyata? Secara khusus, robot akan diberi tugas: a) untuk mempelajari posisi beberapa objek yang terletak di wadah dan di rak yang sesuai dengan pesanan, dan b) untuk mereproduksi keadaan ini setelah pengguna bergerak dan menukar objek.Jika proyek GOAL-Robots memenuhi janjinya, Anda tidak perlu lagi khawatir tentang teman-teman malas: ketika mereka meminta bantuan Anda, Anda hanya meminta teman tiruan Anda untuk membantu mereka!
Setiap tahun, proyek akan menghadirkan "robot percontohan," dan platform robot yang kompleks (seperti iCub atau Kuka) akan digerakkan oleh arsitektur yang dikembangkan dalam proyek untuk menyelesaikan masalah meningkatnya kompleksitas. Para demonstran ini tidak hanya akan menunjukkan kemajuan dalam proyek, tetapi juga akan menjadi kriteria untuk membandingkan kemajuan dalam pengembangan robot independen.Demonstrator terakhir harus menghadapi tugas yang dirumuskan pada awal artikel: apakah mungkin bagi robot untuk menunjukkan universalitas dan kemampuan beradaptasi yang serupa dengan manusia, berinteraksi dengan dunia nyata? Secara khusus, robot akan diberi tugas: a) untuk mempelajari posisi beberapa objek yang terletak di wadah dan di rak yang sesuai dengan pesanan, dan b) untuk mereproduksi keadaan ini setelah pengguna bergerak dan menukar objek.Jika proyek GOAL-Robots memenuhi janjinya, Anda tidak perlu lagi khawatir tentang teman-teman malas: ketika mereka meminta bantuan Anda, Anda hanya meminta teman tiruan Anda untuk membantu mereka!Source: https://habr.com/ru/post/id398815/
All Articles