Cara membangun copter racing dan tidak cepat lelah
Banyak yang tertarik dengan topik membangun quadrocopters balap multi-rotor pada kerangka ZMR250, tetapi begitu Anda mulai menjelajahi topik, Anda hanya menemukan satu ton informasi spesifik yang hanya dapat menakuti pendatang baru, tetapi tidak dapat membantu dengan cara apa pun.Pada artikel ini, saya ingin membagikan apa yang menurut saya akan menjadi langkah yang paling benar dan termudah untuk mulai terbang di perangkat liar ini.
Apa itu balap quadrocopters
Ini adalah kelas yang sama sekali terpisah dari kendaraan terbang. Fitur utama mereka meliputi:- Ukurannya kecil. Nama ZMR250 berarti bahwa ukuran diagonal perangkat adalah 250mm. Berat tanpa baterai dan kamera biasanya tidak melebihi 400 gram
- Stabilisasi aktif minimum
- Berfokuslah pada manajemen yang agresif dan gerakan yang konstan daripada berdiri di tempat
- Dapat membawa peralatan FPV dan kamera aksi
- Desain yang kuat untuk beberapa tetes
Dari sudut pandang teknik, ini cukup sederhana dan memberikan kontrol maksimum kepada pilot. Tidak cocok untuk mengatur catatan untuk rentang, durasi atau ketinggian. Sangat sulit untuk mengambil pandangan mata burung yang bagus darinya. Tetapi Anda akan mendapatkan banyak kesenangan dari proses uji coba dan dapat merekam video yang memusingkan!Apa yang dibutuhkan untuk konstruksi
Set siap
Untuk satu set besi tertentu, setiap pilot berpengalaman akan memiliki pendapatnya sendiri. Ram, pengontrol kecepatan, mesin, pengontrol penerbangan, peralatan kontrol radio, baterai, dll. banyak variasi dan semua orang akan memberi tahu Anda sesuatu yang berbeda.Saya dengan tulus percaya bahwa lebih mudah untuk membeli kit yang sudah jadi daripada memahami semua pendapat ini dan Anda akan mendapatkan 80% dari apa yang dimiliki pilot tingkat lanjut! Berpikir seperti ini, saya naik ke aliexpress dan membeli set komponen termurah yang bisa saya temukan.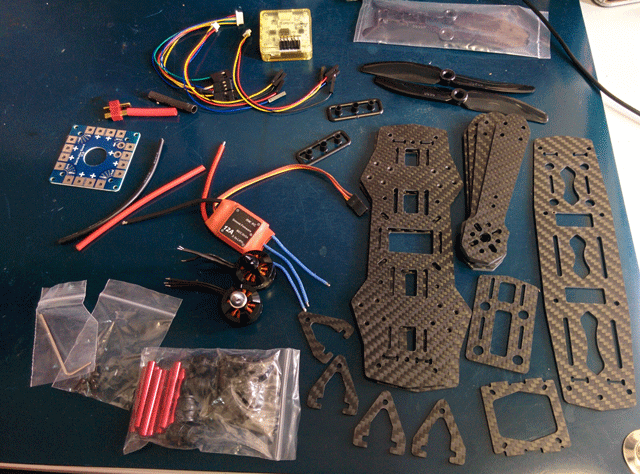 Pada dasarnya, ia memiliki semua yang Anda butuhkan untuk konstruksi, kecuali baterai dan peralatan kontrol radio. Yaitu, untuk uang yang Anda dapatkan bingkai, seperangkat regulator mesin, mesin itu sendiri, pengendali penerbangan dan beberapa hal kecil lainnya.Total $ 70.
Pada dasarnya, ia memiliki semua yang Anda butuhkan untuk konstruksi, kecuali baterai dan peralatan kontrol radio. Yaitu, untuk uang yang Anda dapatkan bingkai, seperangkat regulator mesin, mesin itu sendiri, pengendali penerbangan dan beberapa hal kecil lainnya.Total $ 70.Ekonomi baterai
Copter akan membutuhkan baterai LiPo. Mesin dari set saya tidak mengkonsumsi banyak dan saya memutuskan untuk terbang pada yang sudah saya miliki - 2200mAh, 3S, 20-30C. Jika Anda sudah memiliki baterai yang sama, maka Anda tidak dapat membeli yang lain. Jika Anda tidak memilikinya, maka akan sulit untuk membelinya di aliexpress, tetapi Anda bisa. Saya akan merekomendasikan membeli baterai dari pemasok tepercaya. Sebagai contoh, ini . Lebih baik mengambil dua dari mereka.Mereka akan membutuhkan pengisi daya khusus. Yang paling populer adalah iMAX B6 . Harap dicatat bahwa ini bukan dari jaringan, tetapi dari catu daya 12V. Anda juga akan memerlukan tester murah untuk memantau kondisi baterai.Total $ 54. Biarkan saya mengingatkan Anda lagi bahwa baterai dapat digunakan untuk keperluan lain.Peralatan kontrol radio
Sekali lagi, jika Anda tidak memiliki peralatan yang sesuai, maka masuk akal untuk mengambil kit, yang segera termasuk pemancar. Misalnya, ini satu untuk $ 109.Jika Anda masih ingin membeli sistem RU secara terpisah, maka opsi yang paling minimal mungkin adalah FlySky seharga $ 44. Kami menggunakan salah satu remote Turnigy 9x yang paling umum, tetapi lebih mahal, yang biayanya sekitar $ 70 + pengiriman.Sekrup
Poin yang sangat singkat namun penting. Mereka akan pecah terus-menerus, dengan hampir setiap kecelakaan, yang akan ada banyak. Untuk penerbangan pertama, saya hanya akan membeli lima set baling - baling termurah seharga $ 2,2.Total
Pada akhirnya, jika Anda tidak memiliki apa pun sebelumnya, investasi minimum adalah sekitar $ 175. Saya yakin ini adalah awal yang baik untuk mulai belajar tentang copters pada umumnya.Perakitan copter
Ini tidak rumit dan bahkan orang dengan keterampilan menyolder minimal akan mampu mengatasinya.Pada tahap pertama, frame dirakit, engine dan pengontrol kecepatan dipasang. Jadi, pada akhirnya, itu akan berubah: Yang paling penting yang terlihat dalam foto ini adalah bahwa mesin kiri depan dan belakang kanan harus berputar searah jarum jam (mereka akan ditunjukkan oleh mur penjepit sekrup hitam). Mesin depan kanan dan kiri belakang harus berputar berlawanan arah jarum jam dan mereka akan memiliki kacang perak. Dalam kacang-kacangan ini, omong-omong, arah benang mencegah kelonggarannya.Sekarang mari kita bicara lebih banyak tentang menghubungkan mesin.Semua ini dapat dilakukan dengan cara sederhana dengan menyolder kawat motor dan pengendali perjalanan (ESC), tetapi kami memutuskan untuk mempersingkat mereka. Untuk melakukan ini, psikiater pertama dihapus dari semua regulator.
Yang paling penting yang terlihat dalam foto ini adalah bahwa mesin kiri depan dan belakang kanan harus berputar searah jarum jam (mereka akan ditunjukkan oleh mur penjepit sekrup hitam). Mesin depan kanan dan kiri belakang harus berputar berlawanan arah jarum jam dan mereka akan memiliki kacang perak. Dalam kacang-kacangan ini, omong-omong, arah benang mencegah kelonggarannya.Sekarang mari kita bicara lebih banyak tentang menghubungkan mesin.Semua ini dapat dilakukan dengan cara sederhana dengan menyolder kawat motor dan pengendali perjalanan (ESC), tetapi kami memutuskan untuk mempersingkat mereka. Untuk melakukan ini, psikiater pertama dihapus dari semua regulator.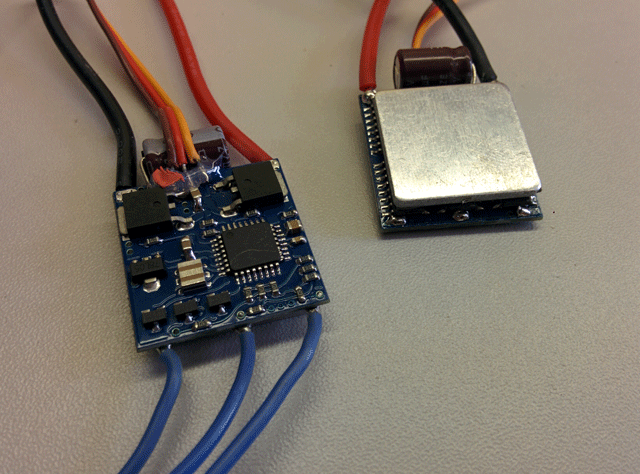 Di satu sisi adalah pengontrol itu sendiri, dan di sisi lain adalah kunci dengan radiator. Kami menyolder kabel standar, memotong kabel motor sampai panjang yang diinginkan dan kemudian menyoldernya ke papan.
Di satu sisi adalah pengontrol itu sendiri, dan di sisi lain adalah kunci dengan radiator. Kami menyolder kabel standar, memotong kabel motor sampai panjang yang diinginkan dan kemudian menyoldernya ke papan.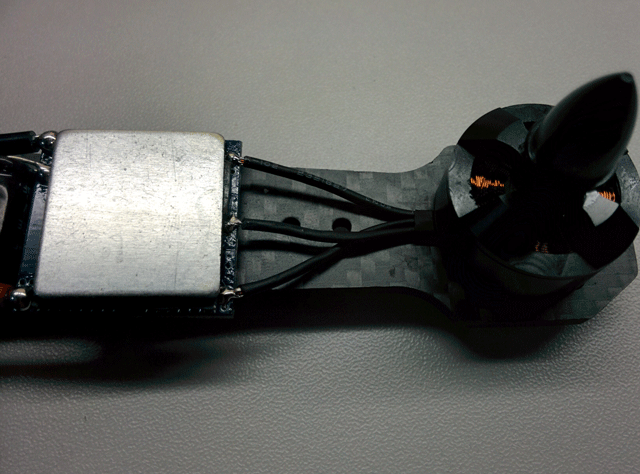 Pada titik ini, periksa apakah motor yang terhubung benar-benar berputar ke arah yang benar. Inilah cara melakukannya:
Pada titik ini, periksa apakah motor yang terhubung benar-benar berputar ke arah yang benar. Inilah cara melakukannya:- Lepaskan sekrup dari mesin, jika sudah terpasang!
- Frame melakukan arus, jadi lindungi ESC dari frame
- Hubungkan kontrol kecepatan ke saluran gas penerima sistem RU dan nyalakan kendali jarak jauh.
Turunkan tongkat gas ke posisi yang lebih rendah. - Hubungkan kekuatan ESC, amati polaritas
- Tambahkan sedikit gas sampai mesin mulai berputar.
- Jika mesin berputar ke arah yang salah, maka perlu untuk menukar dua kabel mesin
Setelah mesin diperiksa efisiensi, tabung heat shrink dapat dipasang pada kontrol kecepatan.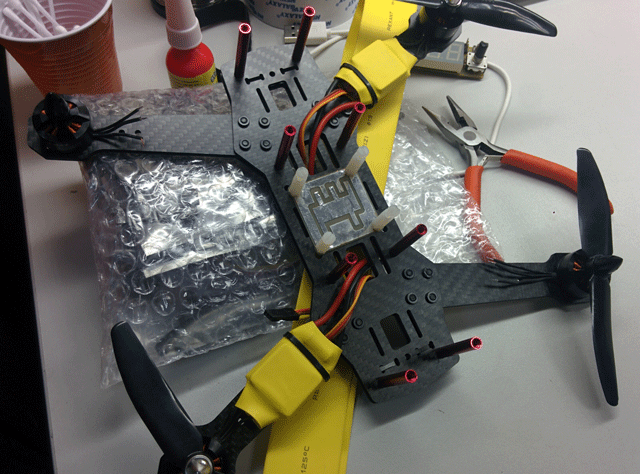 Harap dicatat bahwa kami tidak menggunakan papan distribusi daya dari kit. Kami memiliki stok fiberglass tipis berlapis-foil, yang darinya kami membuat papan tambalan sederhana.
Harap dicatat bahwa kami tidak menggunakan papan distribusi daya dari kit. Kami memiliki stok fiberglass tipis berlapis-foil, yang darinya kami membuat papan tambalan sederhana. Pada board ini, semua kabel plus dan minus pada pengontrol kecepatan harus dihubungkan dengan kabel plus dan minus pada konektor baterai. Papan ini perlu diisolasi dan kami melakukannya dengan cat kuku biasa:
Pada board ini, semua kabel plus dan minus pada pengontrol kecepatan harus dihubungkan dengan kabel plus dan minus pada konektor baterai. Papan ini perlu diisolasi dan kami melakukannya dengan cat kuku biasa: Penerima peralatan kami cukup besar:
Penerima peralatan kami cukup besar: Kami memutuskan untuk melepas kasingnya, menyolder kabel lama dari itu dan menyolder kabel dari motor langsung ke papan. Pada langkah pertama, lebih mudah untuk tidak melakukan ini untuk mencegah kesalahan yang tidak perlu. Sekarang kita siap untuk menginstal pengendali penerbangan dan menghubungkan pengendali kecepatan dengan penerima ke sana. Saat menginstalnya, perhatikan panah yang menunjukkan arah "maju".
Kami memutuskan untuk melepas kasingnya, menyolder kabel lama dari itu dan menyolder kabel dari motor langsung ke papan. Pada langkah pertama, lebih mudah untuk tidak melakukan ini untuk mencegah kesalahan yang tidak perlu. Sekarang kita siap untuk menginstal pengendali penerbangan dan menghubungkan pengendali kecepatan dengan penerima ke sana. Saat menginstalnya, perhatikan panah yang menunjukkan arah "maju". Urutan menghubungkan saluran ke penerima tidak masalah, itu dapat (dan harus) ditentukan kemudian, selama konfigurasi. Penting untuk menghubungkan daya dengan benar ke penerima. Termasuk dalam pengontrol penerbangan adalah kabel dengan konektor untuk penerima. Pada kabel ini, kabel pertama harus berwarna hitam dan harus terhubung ke negatif daya receiver. Kabel kedua berwarna merah dan harus dihubungkan dengan kekuatan plus penerima. Kabel yang tersisa hanya terhubung untuk semua saluran penerima (setidaknya empat yang pertama).Sebelum menghubungkan regulator, satu hal lagi perlu dilakukan. Regulator ini dilengkapi dengan stabilisator untuk menyalakan pengendali penerbangan dan Anda tidak perlu menghubungkan semuanya sekaligus. Penting untuk memilih satu dan membiarkan konektornya terhubung ke pengontrol tidak berubah, dan pada yang lainnya, lepaskan kabel tengah dan mengisolasi itu. Lihat bagaimana ini dilakukan pada foto di atas.Pengontrol kecepatan terhubung sangat sederhana. Kiri depan ke saluran pertama (konektor paling kiri di foto), lalu searah jarum jam: kanan depan ke yang kedua, kanan belakang ke yang ketiga dan kiri belakang ke yang keempat.Sekarang semua elemen yang diperlukan dikumpulkan bersama:
Urutan menghubungkan saluran ke penerima tidak masalah, itu dapat (dan harus) ditentukan kemudian, selama konfigurasi. Penting untuk menghubungkan daya dengan benar ke penerima. Termasuk dalam pengontrol penerbangan adalah kabel dengan konektor untuk penerima. Pada kabel ini, kabel pertama harus berwarna hitam dan harus terhubung ke negatif daya receiver. Kabel kedua berwarna merah dan harus dihubungkan dengan kekuatan plus penerima. Kabel yang tersisa hanya terhubung untuk semua saluran penerima (setidaknya empat yang pertama).Sebelum menghubungkan regulator, satu hal lagi perlu dilakukan. Regulator ini dilengkapi dengan stabilisator untuk menyalakan pengendali penerbangan dan Anda tidak perlu menghubungkan semuanya sekaligus. Penting untuk memilih satu dan membiarkan konektornya terhubung ke pengontrol tidak berubah, dan pada yang lainnya, lepaskan kabel tengah dan mengisolasi itu. Lihat bagaimana ini dilakukan pada foto di atas.Pengontrol kecepatan terhubung sangat sederhana. Kiri depan ke saluran pertama (konektor paling kiri di foto), lalu searah jarum jam: kanan depan ke yang kedua, kanan belakang ke yang ketiga dan kiri belakang ke yang keempat.Sekarang semua elemen yang diperlukan dikumpulkan bersama: Tetap hanya untuk memakai penutup atas. Kami segera mencetak dudukan kamera untuk SJ4000 kami. Peredam silikon harus diduplikasi dengan klem, jika tidak, kamera akan terbang dari copter ketika jatuh.
Tetap hanya untuk memakai penutup atas. Kami segera mencetak dudukan kamera untuk SJ4000 kami. Peredam silikon harus diduplikasi dengan klem, jika tidak, kamera akan terbang dari copter ketika jatuh.
Kustomisasi
Untuk mengkonfigurasi CC3D, gunakan program Libre Pilot ( unduh ). Secara umum, menyiapkan proses yang benar-benar kompleks dan panjang, yang di masa depan akan membutuhkan banyak waktu dan ini akan berlanjut seiring dengan pertumbuhan keterampilan Anda.Di sisi lain, pada tahap awal, ketika Anda tidak memiliki keterampilan apa pun, cukup ikuti langkah-langkah dari Setup Wizard dan Anda sudah bisa terbang! Saya tidak akan memberikan di sini seluruh komik dengan windows, tetapi jika Anda mau, Anda bisa menemukannya di sini .Penerbangan
Saya harus mengatakan bahwa terbang itu sangat sulit dan itu akan memakan waktu berjam-jam pelatihan. Waktu penerbangan sangat singkat, sangat sulit untuk tetap di tempat, tetapi tidak merusak perasaan kontrol! Bahkan helikopter murah seperti itu sangat cepat dan tajam. Selain itu, jauh lebih mudah untuk membawa Anda, misalnya, ke alam.FPV dan peningkatannya
Saya harus mengakui bahwa setelah beberapa penerbangan pertama menjadi jelas bahwa itu paling cocok untuk penerbangan orang pertama. Sistem FPV akan memungkinkan Anda untuk tidak terbatas pada rentang visibilitas dan sangat menambah kepedihan pada penerbangan Anda. Tapi kesenangan itu mahal.Ini membutuhkan transmisi ke jarak yang layak dengan penundaan minimal. Pada saat yang sama, resolusi tidak terlalu penting, karena copter dapat dengan mudah membawa kamera rekaman utama. Sistem semacam itu terdiri dari kamera, OSD (modul yang mencampur telemetri menjadi sinyal video), pemancar, penerima, dan monitor. Blok mana yang bisa, tentu saja, digabungkan. Saya membeli kit yang harganya sekitar $ 100. Tapi saya pikir itu tidak ada gunanya untuk segera membeli sistem FPV pada tahap pertama.Copters kelas ini umumnya pengalaman yang sangat menarik, baik dalam hal penerbangan dan dalam hal konstruksi. Terus-menerus harus menyelesaikan masalah kecil sederhana yang terkait dengan pemilihan komponen, pengurangan berat badan, penyetelan, dll. Cara yang bagus untuk menghabiskan malam panjang di rumah dan alasan bagus untuk keluar ke pedesaan!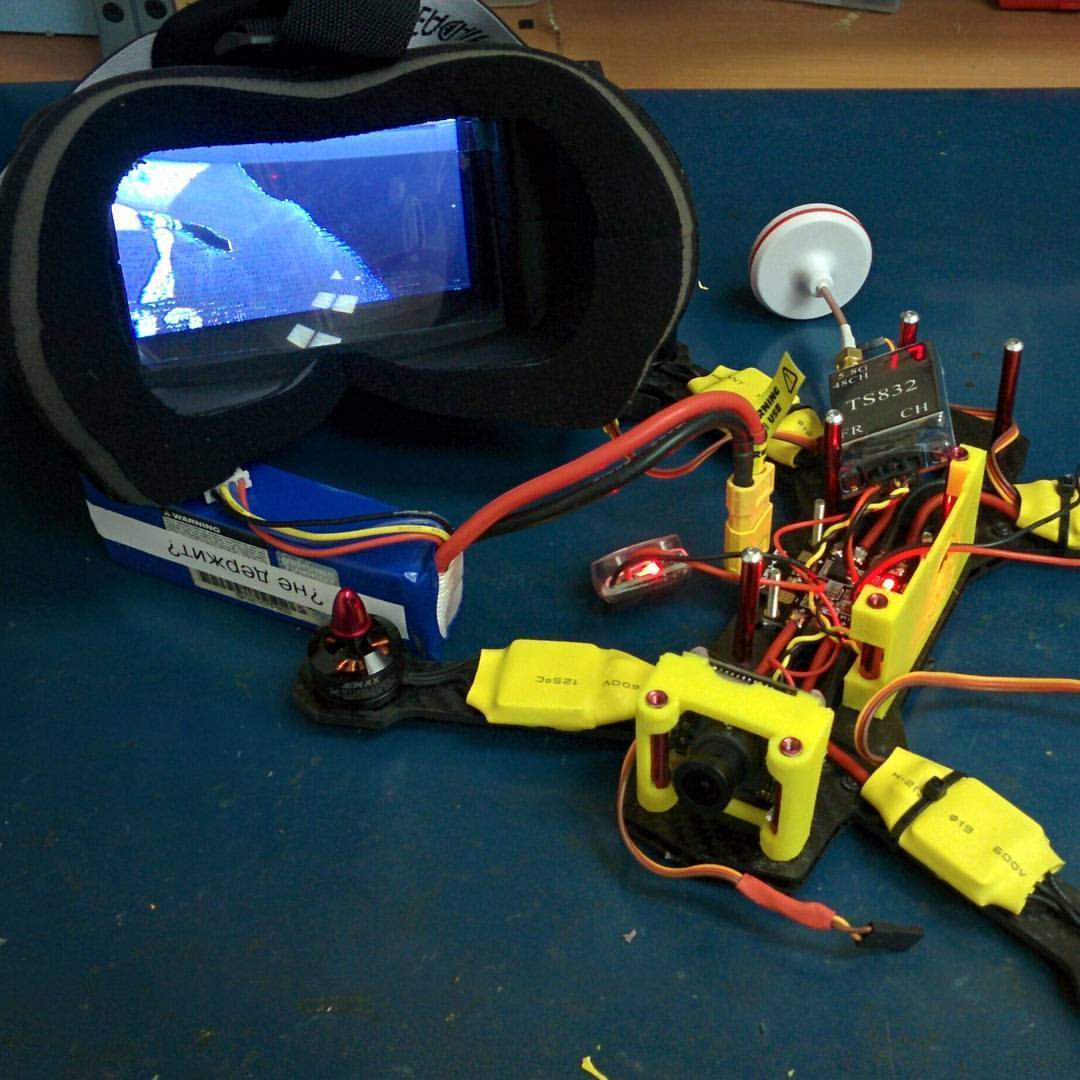 PS: Sejauh yang saya tahu, di kota saya Yekaterinburg hanya saya dan satu orang yang punya alat itu. Akan sangat menarik bagi saya untuk menemukan orang yang berpikiran sama untuk terbang bersama!)
PS: Sejauh yang saya tahu, di kota saya Yekaterinburg hanya saya dan satu orang yang punya alat itu. Akan sangat menarik bagi saya untuk menemukan orang yang berpikiran sama untuk terbang bersama!) Source: https://habr.com/ru/post/id398997/
All Articles