Pengembangan kit elektrifikasi sepeda
Salam kepada semua yang menyukai elektronik! Nama saya Vasily Sukhoparov, saya direktur teknis Eczo.bike. Saya ingin berbicara tentang bagaimana kami mengembangkan kit kelistrikan sepeda, perangkap apa yang harus kami hadapi, dan trik teknik apa yang harus dilakukan. Di depan akan ada sedikit pemrograman STM32, sirkuit, seluk-beluk merancang papan daya dan beberapa kata tentang komponen mekanis CEM (Bicycle Electrification Kit). Kit elektrifikasi dengan daya maksimum 2600 W, komputer terpasang, pelacak, dan baterai yang dapat diganti.
Mengapa semua ini ditemukan?
Memiliki pengalaman perakitan mandiri sepeda listrik di bagian-bagian dan sejumlah besar kerucut dalam proses, membuat saya mengerti bahwa saat ini tidak ada penawaran di pasar yang memenuhi semua kebutuhan saya.Setiap detail harus disesuaikan, pertanian kolektif, menemukan sesuatu dari awal. Anda tidak bisa hanya mengambil dan menyambungkan elektronik ke sepeda, seperti kartu video baru ke komputer. Tidak ada sistem Plug and Play Ride.Sistemnya sendiri dapat menyediakan:- modularitas- antarmuka yang ramah pengguna- kemampuan untuk menyempurnakan sendiri- tidak perlu menyolder konektor dan umumnya pengetahuan elektronik- berat rendahSemua hal di atas adalah apa yang harus dihadapi oleh pengguna biasa ketika dia ingin melengkapi kembali komponen-komponen Cina yang hebat. Dengan pendekatan ini, konstruksi sepeda listrik akan tetap untuk waktu yang lama banyak Geeks dan insinyur elektronik, tidak dapat memasuki massa.Solusi industri tidak bersinar dengan kekuatan khusus (hingga 1000W) dan sering dibangun ke dalam kerangka sepeda mereka sendiri. Di penyedot debu rumah ada lebih banyak "kuda" :) Tidak perlu berbicara tentang konfigurasi dan menghubungkan fitur tambahan.Berangsur-angsur, mulai dari pengembangan komputer on-board di ruang bawah tanah rumah Anda (secara harfiah) dan diakhiri dengan inverter, sistem manajemen baterai, dan seluruh kit secara keseluruhan, mulai memahami bagaimana segala sesuatu harus dibangun untuk memastikan kenyamanan maksimal dari penggunaan perangkat ini. Pada saat yang sama, agar benda itu berfungsi untuk pengguna, dan bukan pengguna, ia harus meluangkan waktu untuk membuatnya berfungsi.Apa yang akhirnya Anda lakukan?
Prototipe dalam gambar sebelum kat dirakit sebagian besar oleh tenaga kerja manual, papan disolder langsung di kantor, dan mereka diprogram di sana. Kasing yang terbuat dari blok plastik padat digiling menggunakan CNC, rangka logam dibuat dalam produksi. Baterai dirakit oleh tenaga mereka sendiri, menggunakan teknologi ala Tesla, komponen dasar yang merupakan elemen dalam faktor bentuk 18650, sel-sel serupa ditemukan di sebagian besar laptop. Ya, secara resmi Tesla mengendarai baterai laptop :-) Komputer on-board tidak hanya menunjukkan tegangan baterai atau persentase muatan (yang kadang-kadang tidak informatif), tetapi juga konsumsi dalam W * h, konsumsi daya spesifik W * h / km, dan rentang, tiga parameter utama yang ingin Anda ketahui saat bepergian ke tempat yang jauh, dan Anda perlu merencanakan rute. Dengan meningkatnya kecepatan, hambatan udara juga meningkat, apalagi, dalam perkembangan, dan itu membuat kontribusi utama pada konsumsi energi selama pergerakan. Anda dapat menghemat lebih sedikit dengan menekan sandal di lantai, atau dengan memutar pedal.
Komputer on-board tidak hanya menunjukkan tegangan baterai atau persentase muatan (yang kadang-kadang tidak informatif), tetapi juga konsumsi dalam W * h, konsumsi daya spesifik W * h / km, dan rentang, tiga parameter utama yang ingin Anda ketahui saat bepergian ke tempat yang jauh, dan Anda perlu merencanakan rute. Dengan meningkatnya kecepatan, hambatan udara juga meningkat, apalagi, dalam perkembangan, dan itu membuat kontribusi utama pada konsumsi energi selama pergerakan. Anda dapat menghemat lebih sedikit dengan menekan sandal di lantai, atau dengan memutar pedal.
 BMS (Sistem manajemen baterai) - sistem manajemen baterai. Ini menghitung biaya / pengosongan, mengontrol proses pengisian elemen dan menyeimbangkannya, jika perlu. Perbedaan dari BMS konvensional sekali lagi dalam hal keandalan, paling sering BMS Cina terbakar selama hubungan pendek dengan nyala api. Anda dapat melihat tegangan pada setiap elemen baterai, di bawah beban, Anda dapat mengontrol resistansi internal mereka. Cacat utama baterai adalah peningkatan self-discharge dan kerusakan ext. resistensi, yang dapat merusak seluruh baterai jika tidak diperhatikan dalam waktu.Pemantauan termal internal. Menambahkan modul ini ke sistem memungkinkan Anda untuk menggunakan daya baterai semaksimal mungkin tanpa mengorbankan kesehatannya, misalnya, mengurangi daya saat baterai hampir sepenuhnya kosong atau pada suhu yang sangat dingin / panas, dan mempercepat proses pengisian menggunakan algoritma balancing sendiri.
BMS (Sistem manajemen baterai) - sistem manajemen baterai. Ini menghitung biaya / pengosongan, mengontrol proses pengisian elemen dan menyeimbangkannya, jika perlu. Perbedaan dari BMS konvensional sekali lagi dalam hal keandalan, paling sering BMS Cina terbakar selama hubungan pendek dengan nyala api. Anda dapat melihat tegangan pada setiap elemen baterai, di bawah beban, Anda dapat mengontrol resistansi internal mereka. Cacat utama baterai adalah peningkatan self-discharge dan kerusakan ext. resistensi, yang dapat merusak seluruh baterai jika tidak diperhatikan dalam waktu.Pemantauan termal internal. Menambahkan modul ini ke sistem memungkinkan Anda untuk menggunakan daya baterai semaksimal mungkin tanpa mengorbankan kesehatannya, misalnya, mengurangi daya saat baterai hampir sepenuhnya kosong atau pada suhu yang sangat dingin / panas, dan mempercepat proses pengisian menggunakan algoritma balancing sendiri. Motor tempel dipilih untuk konversi sepeda, sebagai hanya itu memungkinkan Anda untuk mendapatkan momen yang baik di atas kemudi dan lebih banyak tenaga dengan bobot lebih sedikit. Motor ini memiliki berat 3kg. Sebagai perbandingan, motor roda dapat terdiri dari dua jenis: Penggerak langsung - “penggerak langsung” - datang dalam 1000W atau lebih, tetapi bobotnya dari 6 kg hingga 23 kg hanya per motor. Geared - gear - hingga berat 500W dari 2 kg, dan secara harfiah beberapa motor 1000W hingga 4,5 kg. Dalam kasus pertama, perlu untuk memasang pelek diperkuat pada sepeda, dan perlu untuk menimbun besi pada titik perlekatan sumbu motor, sehingga bingkai tidak runtuh. Tetapi tidak satu roda motor pun dalam kategori bobot serupa memungkinkan Anda untuk mendapatkan momen urutan 160 Nm di roda belakang.
Motor tempel dipilih untuk konversi sepeda, sebagai hanya itu memungkinkan Anda untuk mendapatkan momen yang baik di atas kemudi dan lebih banyak tenaga dengan bobot lebih sedikit. Motor ini memiliki berat 3kg. Sebagai perbandingan, motor roda dapat terdiri dari dua jenis: Penggerak langsung - “penggerak langsung” - datang dalam 1000W atau lebih, tetapi bobotnya dari 6 kg hingga 23 kg hanya per motor. Geared - gear - hingga berat 500W dari 2 kg, dan secara harfiah beberapa motor 1000W hingga 4,5 kg. Dalam kasus pertama, perlu untuk memasang pelek diperkuat pada sepeda, dan perlu untuk menimbun besi pada titik perlekatan sumbu motor, sehingga bingkai tidak runtuh. Tetapi tidak satu roda motor pun dalam kategori bobot serupa memungkinkan Anda untuk mendapatkan momen urutan 160 Nm di roda belakang.Karakteristik KEV
2600
70
50
36,4~54.6V
1C (~1 )
CAN
DC-DC OUT: 13V 13W + 10W
FSTN 240x128 2.8"
Bluetooth 4,0 BMS
Untuk memastikan universalitas dalam koneksi, bus CAN dengan tegangan on-board 13V dan bus daya terpisah dengan tegangan baterai dipilih.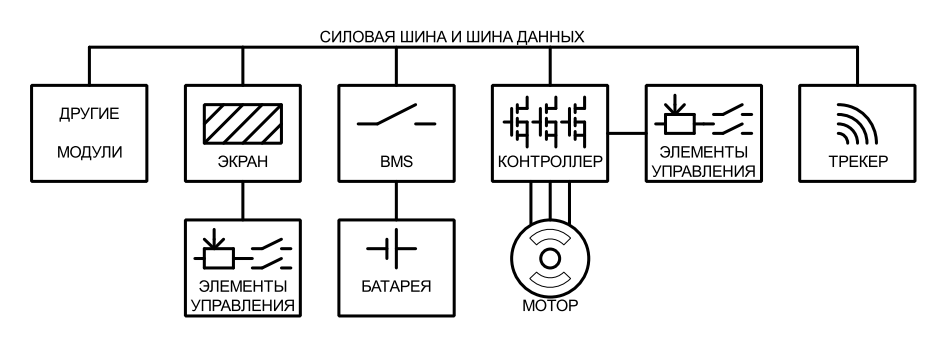 Jantung dari seluruh sistem adalah pengontrol yang mengendalikan motor. Ini mengubah tegangan langsung dari baterai ke tegangan alternatif dengan frekuensi hingga 1500 Hz. (Frekuensi PWM lebih tinggi - hingga 20 kHz) Sinyal kontrol diterima baik secara langsung atau dari komputer on-board (layar) melalui bus CAN. Ini juga memiliki konverter built-in Ubat. di 13V untuk memastikan pengoperasian modul.Baterai terhubung ke jaringan publik melalui BMS, seperti yang disebutkan di atas, ia memonitor baterai untuk memastikan umur panjang. Juga memiliki konverter 13V untuk pengoperasian modul.Komputer on-board terhubung melalui bus CAN dengan tegangan on-board, menampilkan informasi yang diterima dari modul, dan juga dapat merekam data ke kartu SD.Pelacak juga terhubung melalui CAN + 13V dan memiliki baterai kecil untuk melindungi terhadap pencurian sepeda ketika baterai utama hilang.Sistem mendukung penyambungan hingga 4 baterai dan pengontrol pada saat yang bersamaan, misalnya untuk mengendalikan kendaraan roda empat.
Jantung dari seluruh sistem adalah pengontrol yang mengendalikan motor. Ini mengubah tegangan langsung dari baterai ke tegangan alternatif dengan frekuensi hingga 1500 Hz. (Frekuensi PWM lebih tinggi - hingga 20 kHz) Sinyal kontrol diterima baik secara langsung atau dari komputer on-board (layar) melalui bus CAN. Ini juga memiliki konverter built-in Ubat. di 13V untuk memastikan pengoperasian modul.Baterai terhubung ke jaringan publik melalui BMS, seperti yang disebutkan di atas, ia memonitor baterai untuk memastikan umur panjang. Juga memiliki konverter 13V untuk pengoperasian modul.Komputer on-board terhubung melalui bus CAN dengan tegangan on-board, menampilkan informasi yang diterima dari modul, dan juga dapat merekam data ke kartu SD.Pelacak juga terhubung melalui CAN + 13V dan memiliki baterai kecil untuk melindungi terhadap pencurian sepeda ketika baterai utama hilang.Sistem mendukung penyambungan hingga 4 baterai dan pengontrol pada saat yang bersamaan, misalnya untuk mengendalikan kendaraan roda empat.Kesimpulannya
Dalam artikel berikut ini saya akan memberi tahu Anda lebih lanjut tentang pengembangan komputer, pengontrol, sistem manajemen baterai, dan cara kami memasang baterai dari sel. Jika ini menarik, saya akan menulis artikel terpisah tentang menguji drive pada dudukan dyno atau bagaimana mengukur efisiensi bundel pengontrol motor + di rumah. Source: https://habr.com/ru/post/id399029/
All Articles