Multicopter belajar duduk di atap mobil yang bergerak
 Drone berada di atap mobil dengan kecepatan 50 km / jam. Kemampuan multicopters untuk menggantung secara statis di udara menjadikannya alat yang sangat baik untuk melakukan berbagai tugas, termasuk untuk pengawasan video, pengiriman paket atau partisipasi dalam operasi pencarian dan penyelamatan. Pada saat yang sama, mereka harus bertahan dengan daya tahan baterai yang terbatas dan jangkauan yang relatif kecil. Daya baterai tidak cukup untuk sampai ke tempat itu, jika terletak beberapa kilometer dari pangkalan. Para insinyur dari laboratorium robot mobile dan sistem otonom dari Polytechnic School of Montreal (Kanada) mengusulkan solusi orisinal untuk masalah tersebut: sebuah drone diajarkan untuk duduk di atap mobil yang melintas di sepanjang rutenya.bergerak dengan kecepatan hingga 50 km / jam. Mobil terkait benar-benar berubah menjadi kapal induk.Jika polisi memiliki hak untuk menggunakan kendaraan sipil untuk kebutuhan mereka, maka drone polisi juga dapat memberi mereka hak semacam itu. Orang dapat membayangkan bahwa bahkan untuk drone sipil, sistem "kemitraan komersial" akan diperkenalkan, sehingga pengemudi akan membayar sedikit biaya jika penumpang tak berawak terpasang di atap. Dengan kecepatan per kilometer. Multicopter akan mengenali mobil (dengan koordinat GPS dan visual) dan duduk di atap hanya mereka yang berpartisipasi dalam program afiliasi.Sebenarnya, dengan teknologi saat ini, drone tidak akan bisa mendarat di atap mobil yang sewenang-wenang, karena untuk membidiknya memerlukan landasan pendaratan atap dengan kode AprilTag hitam dan putih khusus.
Drone berada di atap mobil dengan kecepatan 50 km / jam. Kemampuan multicopters untuk menggantung secara statis di udara menjadikannya alat yang sangat baik untuk melakukan berbagai tugas, termasuk untuk pengawasan video, pengiriman paket atau partisipasi dalam operasi pencarian dan penyelamatan. Pada saat yang sama, mereka harus bertahan dengan daya tahan baterai yang terbatas dan jangkauan yang relatif kecil. Daya baterai tidak cukup untuk sampai ke tempat itu, jika terletak beberapa kilometer dari pangkalan. Para insinyur dari laboratorium robot mobile dan sistem otonom dari Polytechnic School of Montreal (Kanada) mengusulkan solusi orisinal untuk masalah tersebut: sebuah drone diajarkan untuk duduk di atap mobil yang melintas di sepanjang rutenya.bergerak dengan kecepatan hingga 50 km / jam. Mobil terkait benar-benar berubah menjadi kapal induk.Jika polisi memiliki hak untuk menggunakan kendaraan sipil untuk kebutuhan mereka, maka drone polisi juga dapat memberi mereka hak semacam itu. Orang dapat membayangkan bahwa bahkan untuk drone sipil, sistem "kemitraan komersial" akan diperkenalkan, sehingga pengemudi akan membayar sedikit biaya jika penumpang tak berawak terpasang di atap. Dengan kecepatan per kilometer. Multicopter akan mengenali mobil (dengan koordinat GPS dan visual) dan duduk di atap hanya mereka yang berpartisipasi dalam program afiliasi.Sebenarnya, dengan teknologi saat ini, drone tidak akan bisa mendarat di atap mobil yang sewenang-wenang, karena untuk membidiknya memerlukan landasan pendaratan atap dengan kode AprilTag hitam dan putih khusus. Atap mobil biasa sangat tidak cocok untuk peralatan seperti situs. Pengembang sistem percaya bahwa angkutan umum (bus), truk pos, dan layanan pengiriman cocok sebagai pembawa. Mobil-mobil ini secara aktif berkeliling kota, sehingga untuk sebuah drone tidak akan menjadi masalah "gratis" untuk melompat selusin kilometer ke tujuan mereka.Secara teori, adalah mungkin untuk melengkapi atap mobil dengan situs pendaratan tersebut. Selama penerbangan uji, para peneliti menunjukkan bahwa bahkan area yang relatif kecil pada "mobil penumpang" sudah cukup untuk mendarat.
Atap mobil biasa sangat tidak cocok untuk peralatan seperti situs. Pengembang sistem percaya bahwa angkutan umum (bus), truk pos, dan layanan pengiriman cocok sebagai pembawa. Mobil-mobil ini secara aktif berkeliling kota, sehingga untuk sebuah drone tidak akan menjadi masalah "gratis" untuk melompat selusin kilometer ke tujuan mereka.Secara teori, adalah mungkin untuk melengkapi atap mobil dengan situs pendaratan tersebut. Selama penerbangan uji, para peneliti menunjukkan bahwa bahkan area yang relatif kecil pada "mobil penumpang" sudah cukup untuk mendarat. Drone berada di atap mobil penumpang dengan kecepatan 40 km / jam.Keuntungan dari metode pergerakan ini adalah drone di atap dapat mengisi baterainya. Dengan demikian, dua masalah UAV yang ada diselesaikan sekaligus - daya baterai tidak memadai dan jarak pendek.Sistem pendaratan tak berawak yang dikembangkan oleh insinyur Kanada menggunakan koordinat GPS dari ponsel untuk mencari kendaraan, dan selama pendaratan tidak memerlukan koordinasi manuver antara UAV dan mobil. Artinya, tidak ada bantuan yang diperlukan dari pengemudi sama sekali, kecuali untuk menginstal platform pendaratan di atap dengan spidol visual dan ponsel. Secara teoritis, pengemudi selama perjalanan bahkan mungkin tidak memperhatikan bahwa seseorang menggunakan mobilnya di jalan.Elemen kunci ketika mendaratkan drone di atap mobil adalah penanda visual hitam dan putih AprilTag , yang akhir-akhir ini semakin banyak digunakan dalam robotika. Dikembangkan oleh Olson pada 2011, spidol tersebut memainkan peran identifikasi visual dan posisi 3D yang akurat dari objek relatif terhadap kamera.
Drone berada di atap mobil penumpang dengan kecepatan 40 km / jam.Keuntungan dari metode pergerakan ini adalah drone di atap dapat mengisi baterainya. Dengan demikian, dua masalah UAV yang ada diselesaikan sekaligus - daya baterai tidak memadai dan jarak pendek.Sistem pendaratan tak berawak yang dikembangkan oleh insinyur Kanada menggunakan koordinat GPS dari ponsel untuk mencari kendaraan, dan selama pendaratan tidak memerlukan koordinasi manuver antara UAV dan mobil. Artinya, tidak ada bantuan yang diperlukan dari pengemudi sama sekali, kecuali untuk menginstal platform pendaratan di atap dengan spidol visual dan ponsel. Secara teoritis, pengemudi selama perjalanan bahkan mungkin tidak memperhatikan bahwa seseorang menggunakan mobilnya di jalan.Elemen kunci ketika mendaratkan drone di atap mobil adalah penanda visual hitam dan putih AprilTag , yang akhir-akhir ini semakin banyak digunakan dalam robotika. Dikembangkan oleh Olson pada 2011, spidol tersebut memainkan peran identifikasi visual dan posisi 3D yang akurat dari objek relatif terhadap kamera. Marker 30 × 30 cm digunakan untuk mengarahkan drone dan berkoordinasi dengan platform dalam enam derajat kebebasan.Sebagai informasi tambahan, perkiraan perkiraan koordinat dan kecepatan kendaraan, yang berasal dari modul GPS dan IMU (Inertial Measurement Unit) pada ponsel, sudah cukup.Quadrocopter dilengkapi dengan sistem navigasi inersia (INS), kamera gimbal tiga sumbu (dengan IMU terpisah) untuk melacak target, dan kamera tetap sudut lebar ke bawah yang melacak penanda AprilTag dari jarak dekat di detik-detik terakhir manuver. Para pengembang mencatat bahwa pada tahap mendekati kendaraan, UAV juga dapat menggunakan sensor kecepatan, yang diletakkan pada banyak quadrocopters modern. Sensor tersebut menghitung kecepatan dari urutan bingkai foto.
Marker 30 × 30 cm digunakan untuk mengarahkan drone dan berkoordinasi dengan platform dalam enam derajat kebebasan.Sebagai informasi tambahan, perkiraan perkiraan koordinat dan kecepatan kendaraan, yang berasal dari modul GPS dan IMU (Inertial Measurement Unit) pada ponsel, sudah cukup.Quadrocopter dilengkapi dengan sistem navigasi inersia (INS), kamera gimbal tiga sumbu (dengan IMU terpisah) untuk melacak target, dan kamera tetap sudut lebar ke bawah yang melacak penanda AprilTag dari jarak dekat di detik-detik terakhir manuver. Para pengembang mencatat bahwa pada tahap mendekati kendaraan, UAV juga dapat menggunakan sensor kecepatan, yang diletakkan pada banyak quadrocopters modern. Sensor tersebut menghitung kecepatan dari urutan bingkai foto. Perkiraan lokasi relatif, kecepatan, dan akselerasi dihitung di komputer menggunakan filter Kalmanpada frekuensi 100 Hz. Ini adalah filter rekursif yang efektif yang mengevaluasi vektor keadaan sistem dinamis menggunakan serangkaian pengukuran tidak lengkap dan berisik.
Perkiraan lokasi relatif, kecepatan, dan akselerasi dihitung di komputer menggunakan filter Kalmanpada frekuensi 100 Hz. Ini adalah filter rekursif yang efektif yang mengevaluasi vektor keadaan sistem dinamis menggunakan serangkaian pengukuran tidak lengkap dan berisik. Eksperimen menunjukkan bahwa multicopter berhasil mendarat di mobil dengan kecepatan hingga 50 km / jam. Dengan meningkatnya kecepatan, risiko terhenti dari tepi platform meningkat. Mungkin masalah ini dapat diatasi dengan meningkatkan kecepatan pemrosesan informasi dari kamera drone.
Eksperimen menunjukkan bahwa multicopter berhasil mendarat di mobil dengan kecepatan hingga 50 km / jam. Dengan meningkatnya kecepatan, risiko terhenti dari tepi platform meningkat. Mungkin masalah ini dapat diatasi dengan meningkatkan kecepatan pemrosesan informasi dari kamera drone.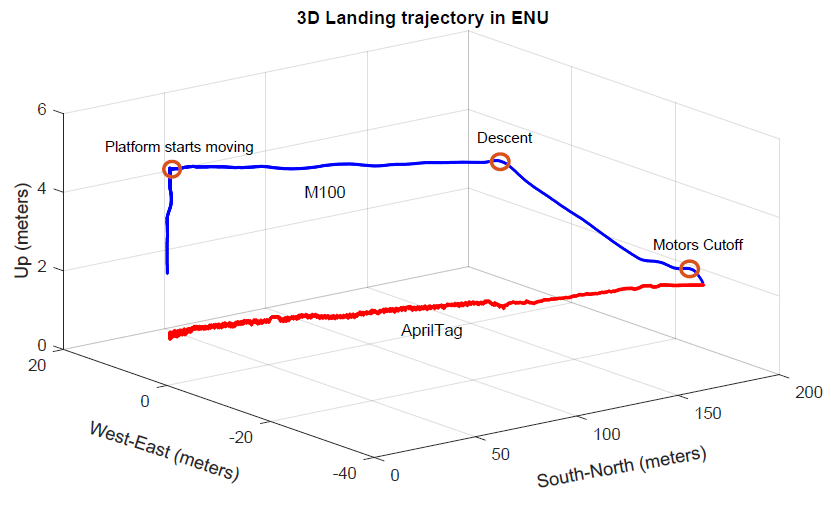 Lintasan pendaratan dengan kecepatan 50 km / jam.Artikel ilmiah disiapkan untuk Kongres Dunia IFAC 2017 dan diterbitkan pada 22 November 2016 di arXiv.org (arXiv: 1611.07329).
Lintasan pendaratan dengan kecepatan 50 km / jam.Artikel ilmiah disiapkan untuk Kongres Dunia IFAC 2017 dan diterbitkan pada 22 November 2016 di arXiv.org (arXiv: 1611.07329).Source: https://habr.com/ru/post/id399463/
All Articles