Bagaimana kami mempersiapkan UAV Challenge 2016
 Quad-pesawat Murena selama penerbangan ujiTantangan UAV adalah acara tahunan yang bertujuan memperluas kemampuan UAVdan, dalam kombinasi, salah satu kompetisi robot paling ambisius di dunia. Dampak peristiwa pada industri ini cukup besar: pada tahun 2014, misalnya, kontributor reguler dari proyek-proyek populer seperti Ardupilot, PX4 dan Paparazzi berpartisipasi dalam Tantangan UAV, sehingga banyak fitur dari pengontrol penerbangan yang ada saat ini dibentuk tepat di bawah pengaruh persyaratan kompetisi ini. Setiap dua tahun, kompetisi ini terbuka untuk tim dari seluruh dunia, dan pada saat yang sama misi untuk menyelamatkan seseorang menjadi tema. Tahun ini, kami juga berhasil masuk ke daftar sepuluh tim yang melewati tiga tahap awal Tantangan UAV, dan pergi ke acara-acara bagian terakhir, yang berlangsung dari 27 hingga 29 September di Dalby, Australia. Tantangan berakhir dua bulan lalu - sejak saat itu kesan kami telah tenang,kami telah menganalisis pengalaman dan sekarang siap untuk menggambarkan dua pesawat yang dengannya kami tiba di acara tersebut.Kami adalah MelAvio Avionics Club, sebuah asosiasi mahasiswa dari Universitas Teknologi Warsawa. Kami menangani pemrograman, elektronik, dan mekanik sebagai bagian dari aplikasi mereka untuk drone, dan hampir semua pekerjaan kami dipersiapkan untuk berbagai kompetisi, yang utamanya adalah Tantangan UAV. Faktanya, tahun ini MelAvio mengambil bagian dalam tantangan untuk kedua kalinya: sebelum itu, dua tahun yang lalu, tim kami telah pergi ke putaran final di Australia. Kemudian kami berhasil menunjukkan diri kami dengan baik dengan desain mekanik asli dan pengontrol penerbangan buatan sendiri, mengambil tempat kesepuluh di klasemen keseluruhan dan menerima penghargaan untuk keterampilan terbang, meskipun tidak sepenuhnya memenuhi misi kompetisi.
Quad-pesawat Murena selama penerbangan ujiTantangan UAV adalah acara tahunan yang bertujuan memperluas kemampuan UAVdan, dalam kombinasi, salah satu kompetisi robot paling ambisius di dunia. Dampak peristiwa pada industri ini cukup besar: pada tahun 2014, misalnya, kontributor reguler dari proyek-proyek populer seperti Ardupilot, PX4 dan Paparazzi berpartisipasi dalam Tantangan UAV, sehingga banyak fitur dari pengontrol penerbangan yang ada saat ini dibentuk tepat di bawah pengaruh persyaratan kompetisi ini. Setiap dua tahun, kompetisi ini terbuka untuk tim dari seluruh dunia, dan pada saat yang sama misi untuk menyelamatkan seseorang menjadi tema. Tahun ini, kami juga berhasil masuk ke daftar sepuluh tim yang melewati tiga tahap awal Tantangan UAV, dan pergi ke acara-acara bagian terakhir, yang berlangsung dari 27 hingga 29 September di Dalby, Australia. Tantangan berakhir dua bulan lalu - sejak saat itu kesan kami telah tenang,kami telah menganalisis pengalaman dan sekarang siap untuk menggambarkan dua pesawat yang dengannya kami tiba di acara tersebut.Kami adalah MelAvio Avionics Club, sebuah asosiasi mahasiswa dari Universitas Teknologi Warsawa. Kami menangani pemrograman, elektronik, dan mekanik sebagai bagian dari aplikasi mereka untuk drone, dan hampir semua pekerjaan kami dipersiapkan untuk berbagai kompetisi, yang utamanya adalah Tantangan UAV. Faktanya, tahun ini MelAvio mengambil bagian dalam tantangan untuk kedua kalinya: sebelum itu, dua tahun yang lalu, tim kami telah pergi ke putaran final di Australia. Kemudian kami berhasil menunjukkan diri kami dengan baik dengan desain mekanik asli dan pengontrol penerbangan buatan sendiri, mengambil tempat kesepuluh di klasemen keseluruhan dan menerima penghargaan untuk keterampilan terbang, meskipun tidak sepenuhnya memenuhi misi kompetisi. Barracuda, MelAvio drone, di UAV Challenge Outback Rescue 2014Tahun ini, kami mengubah pendekatan partisipasi sedikit dan menggunakan pengontrol penerbangan yang sudah jadi (Ardupilot on Pixhawk), menyelesaikannya untuk kebutuhan kita. Hal ini disebabkan oleh kenyataan bahwa kondisi tantangan menjadi lebih rumit dibandingkan dengan terakhir kali, dan pengembangan independen dari solusi yang memenuhi semua kondisi adalah tugas yang terlalu ambisius, itu lebih logis untuk menggunakan proyek open source yang ada.
Barracuda, MelAvio drone, di UAV Challenge Outback Rescue 2014Tahun ini, kami mengubah pendekatan partisipasi sedikit dan menggunakan pengontrol penerbangan yang sudah jadi (Ardupilot on Pixhawk), menyelesaikannya untuk kebutuhan kita. Hal ini disebabkan oleh kenyataan bahwa kondisi tantangan menjadi lebih rumit dibandingkan dengan terakhir kali, dan pengembangan independen dari solusi yang memenuhi semua kondisi adalah tugas yang terlalu ambisius, itu lebih logis untuk menggunakan proyek open source yang ada.Tantangan Tantangan
Untuk memperjelas ruang lingkup tugas, masuk akal untuk menjelaskan secara singkat misi yang disajikan untuk kompetisi. Tugas tim adalah untuk mengirimkan sampel darah dari Joe, seorang penduduk pedesaan, yang, menurut legenda, tiba-tiba merasa tidak enak ditemukan di rumahnya di luar kota. Rumah Joe terputus dari kota oleh banjir, jadi untuk mencapai itu dan terbang kembali, pesawat harus benar-benar mengatasi hingga 51 kilometer wilayah udara di sepanjang jalur tidak langsung. Selain itu, posisi Joe hanya diketahui dengan keakuratan seratus meter, dan untuk menutup lahan dan menghindari melukai orang itu, pesawat harus melokalkannya dengan lebih akurat yang sudah ada di tempatnya. Juga memperumit situasi adalah kenyataan bahwa hampir tidak ada jaminan tentang lanskap baik pada awal misi dan di sekitar Joe,sehingga drone harus memiliki kemampuan lepas landas atau mendarat secara vertikal atau vertikal, serta sistem yang memungkinkan dengan tingkat keandalan yang memadai untuk memilih tempat pendaratan yang sesuai. Penyelenggara tantangan mendorong perilaku otonom drone sebanyak mungkin, sehingga pendekatan terbaik adalah dengan sepenuhnya menghilangkan tindakan pilot dari misi, dari keberangkatan dari lokasi peluncuran ke pendaratan dengan sampel darah di tempat yang sama. Selain drone "pengiriman" utama, sebuah pesawat tambahan dapat mengambil bagian dalam misi. Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga.serta sistem yang memungkinkan dengan tingkat keandalan yang memadai untuk memilih tempat yang cocok untuk pendaratan. Penyelenggara tantangan mendorong perilaku otonom drone sebanyak mungkin, sehingga pendekatan terbaik adalah dengan sepenuhnya menghilangkan tindakan pilot dari misi, dari keberangkatan dari lokasi peluncuran ke pendaratan dengan sampel darah di tempat yang sama. Selain drone "pengiriman" utama, sebuah pesawat tambahan dapat mengambil bagian dalam misi. Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga.serta sistem yang memungkinkan dengan tingkat keandalan yang memadai untuk memilih tempat yang cocok untuk pendaratan. Penyelenggara tantangan mendorong perilaku otonom drone sebanyak mungkin, sehingga pendekatan terbaik adalah dengan sepenuhnya menghilangkan tindakan pilot dari misi, dari keberangkatan dari lokasi peluncuran ke pendaratan dengan sampel darah di tempat yang sama. Selain drone "pengiriman" utama, sebuah pesawat tambahan dapat mengambil bagian dalam misi. Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga.jadi pendekatan terbaik yang mungkin adalah dengan sepenuhnya menghilangkan tindakan pilot dari misi, dari keberangkatan dari lokasi peluncuran ke pendaratan dengan sampel darah di tempat yang sama. Selain drone "pengiriman" utama, sebuah pesawat tambahan dapat mengambil bagian dalam misi. Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga.jadi pendekatan terbaik yang mungkin adalah dengan sepenuhnya menghilangkan tindakan pilot dari misi, dari keberangkatan dari lokasi peluncuran ke pendaratan dengan sampel darah di tempat yang sama. Selain drone "pengiriman" utama, sebuah pesawat tambahan dapat mengambil bagian dalam misi. Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga.Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga.Kedua perangkat memiliki cukup banyak persyaratan untuk memastikan penerbangan yang aman dan perilaku yang benar dalam situasi yang tidak terduga. ,Sebagai pesawat tak berawak utama untuk misi, kami memutuskan untuk menggunakan quad-plane - kombinasi quadrocopter dan pesawat layout klasik. Kebutuhan untuk menyediakan lepas landas dan mendarat vertikal segera dihapus dari perhatian kami skema sayap tetap standar, sehingga alternatif utama untuk opsi yang dipilih adalah tiltrotor dan helikopter. Versi dengan convertiplane ditolak karena fakta bahwa dengan pitch tetap dari baling-baling, mesin convertiplane ditakdirkan untuk efisiensi rendah, yang tidak dapat diterima oleh kami karena kisaran yang diperlukan diasumsikan; konstruksi tiltrotor dengan penyangga pitch variabel menyiratkan tingkat kompleksitas mekanis, yang kami, sebagai organisasi ilmiah siswa, tidak dapat atasi karena keterbatasan sumber daya.Untuk opsi helikopter, kami juga memperkirakan akan menemui kesulitan dengan mekanik, tetapi mereka tidak terlihat terlalu tertekan, dan kami menolak opsi ini karena pesawat quad terlihat seperti platform yang lebih orisinal dan menarik.
,Sebagai pesawat tak berawak utama untuk misi, kami memutuskan untuk menggunakan quad-plane - kombinasi quadrocopter dan pesawat layout klasik. Kebutuhan untuk menyediakan lepas landas dan mendarat vertikal segera dihapus dari perhatian kami skema sayap tetap standar, sehingga alternatif utama untuk opsi yang dipilih adalah tiltrotor dan helikopter. Versi dengan convertiplane ditolak karena fakta bahwa dengan pitch tetap dari baling-baling, mesin convertiplane ditakdirkan untuk efisiensi rendah, yang tidak dapat diterima oleh kami karena kisaran yang diperlukan diasumsikan; konstruksi tiltrotor dengan penyangga pitch variabel menyiratkan tingkat kompleksitas mekanis, yang kami, sebagai organisasi ilmiah siswa, tidak dapat atasi karena keterbatasan sumber daya.Untuk opsi helikopter, kami juga memperkirakan akan menemui kesulitan dengan mekanik, tetapi mereka tidak terlihat terlalu tertekan, dan kami menolak opsi ini karena pesawat quad terlihat seperti platform yang lebih orisinal dan menarik.Konstruksi
Sebelum mendesain model quad-plane yang “serius”, kami mengumpulkan model uji - alat yang kami sebut “Freak”. Hibrida ini dibuat atas dasar pesawat model yang sudah jadi dan dirancang untuk menguji operabilitas gagasan pesawat quad, serta semua inovasi yang kami adaptasikan dalam pengontrol penerbangan. Setelah kami memastikan bahwa kami benar-benar dapat terbang dengan konfigurasi drone seperti itu, kami mulai mengembangkan model yang lebih besar. Pesawat ujiDari awal pengembangan, jelas bahwa baling-baling helikopter dan mesin akan menciptakan hambatan dan ketidakseimbangan tambahan dalam mode pesawat, jadi kami memutuskan untuk mencoba membuat desain pesawat itu sendiri sebagai "pengereman" mungkin dan sekestabil mungkin. Selain itu, persyaratan awal kami adalah untuk mempertahankan ruang maksimum di badan pesawat, sehingga ada peralatan sistem penglihatan komputer dan baterai lithium-polimer dengan kapasitas yang cukup untuk menjalankan seluruh misi (pesawat benar-benar listrik). Berdasarkan pertimbangan ini, kami memilih pesawat bersayap tinggi dengan sayap trapesium dengan pemanjangan sedang dan ekor-T; sudut sayap V melintang dipilih sama dengan satu setengah derajat.Dengan data awal yang ditunjukkan pada desain dan asumsi massa pesawat, kami memulai pengembangan. Pertama, dengan bantuan aplikasi Profili 2.0, opsi profil yang cocok untuk sayap utama pesawat dipilih, setelah itu dalam XFLR5 kami menentukan bentuk sayap dan bulu dalam volume. Selain itu, di ANSYS Fluent kami memverifikasi bahwa mesin helikopter dan baling-baling yang terletak di sekitar sayap tidak membuat perubahan kritis dalam sifat aliran udara di sayap. Untuk melaksanakan prosedur ini, kami melanjutkan ke studi yang lebih rinci dari seluruh struktur di SOLIDWORKS.
Pesawat ujiDari awal pengembangan, jelas bahwa baling-baling helikopter dan mesin akan menciptakan hambatan dan ketidakseimbangan tambahan dalam mode pesawat, jadi kami memutuskan untuk mencoba membuat desain pesawat itu sendiri sebagai "pengereman" mungkin dan sekestabil mungkin. Selain itu, persyaratan awal kami adalah untuk mempertahankan ruang maksimum di badan pesawat, sehingga ada peralatan sistem penglihatan komputer dan baterai lithium-polimer dengan kapasitas yang cukup untuk menjalankan seluruh misi (pesawat benar-benar listrik). Berdasarkan pertimbangan ini, kami memilih pesawat bersayap tinggi dengan sayap trapesium dengan pemanjangan sedang dan ekor-T; sudut sayap V melintang dipilih sama dengan satu setengah derajat.Dengan data awal yang ditunjukkan pada desain dan asumsi massa pesawat, kami memulai pengembangan. Pertama, dengan bantuan aplikasi Profili 2.0, opsi profil yang cocok untuk sayap utama pesawat dipilih, setelah itu dalam XFLR5 kami menentukan bentuk sayap dan bulu dalam volume. Selain itu, di ANSYS Fluent kami memverifikasi bahwa mesin helikopter dan baling-baling yang terletak di sekitar sayap tidak membuat perubahan kritis dalam sifat aliran udara di sayap. Untuk melaksanakan prosedur ini, kami melanjutkan ke studi yang lebih rinci dari seluruh struktur di SOLIDWORKS.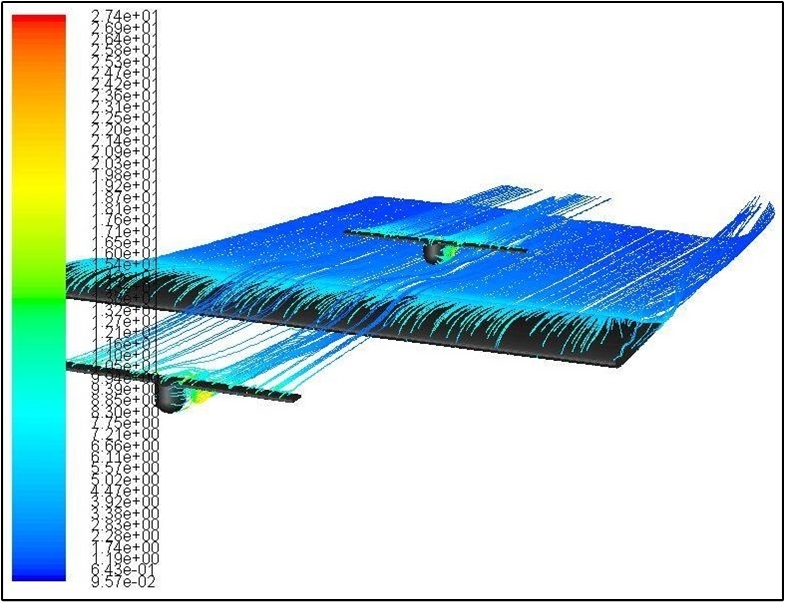 Tes Aliran Propeller Pesawat dalam ANSYS FasihKetika mengerjakan struktur, perhatian khusus harus diberikan pada badan dan sayap pesawat terbang, karena mereka memiliki jumlah suku cadang maksimum dan memiliki dampak terbesar pada daya dukung dan dinamika pesawat. Pendekatan khusus untuk elemen-elemen ini diperlukan tidak hanya selama pengembangan, tetapi juga selama perakitan, karena itu perlu untuk membuat mereka seringan mungkin, sambil mempertahankan kekuatan mereka yang cukup.Sayap pesawat terbuat dari tiga komponen: bagian tengah dan konsol kanan dan kiri. Dasar untuk pembangunan sayap adalah busa polystyrene diekstrusi. Bagian sayap dirancang agar permukaannya lurus, dan berkat ini, mesin kawat CNC dapat digunakan untuk memotong poliester dengan akurat. Setelah itu, poliester prefabrikasi menjadi sasaran pemrosesan tambahan untuk meningkatkan kekuatan mereka dan meningkatkan kinerja aerodinamis. Jadi, bagian tengah kosong dilaminasi dengan serat karbon dan resin poliester; untuk menjaga benda kerja tetap halus dan rata, selama periode laminasi dibungkus dengan plexiglass, ditempatkan dalam kantong vakum dan dipasang di busa polystyrene negatif.Itu tidak mungkin untuk menggunakan serat karbon untuk pembuatan konsol sayap, termasuk untuk alasan itu diperlukan untuk menempatkan peralatan transmisi radio di bagian ini (batubara menciptakan gangguan), sehingga konsol dilaminasi dengan lapisan fiberglass dan lapisan balsa. Ikat dibuat pada tepi elemen untuk perakitan mereka menjadi struktur sayap tunggal. Juga, sebuah tempat dipotong di sayap untuk menempatkan transceiver radio, drive untuk ailerons, kabel dan peralatan lainnya; di tempat-tempat yang diperlukan, potongan-potongan yang dicetak pada printer 3D melekat pada potongan-potongan untuk peralatan.Ikat dibuat pada tepi elemen untuk perakitan mereka menjadi struktur sayap tunggal. Juga, sebuah tempat dipotong di sayap untuk menempatkan transceiver radio, drive untuk ailerons, kabel dan peralatan lainnya; di tempat-tempat yang diperlukan, potongan-potongan yang dicetak pada printer 3D melekat pada potongan-potongan untuk peralatan.Ikat dibuat pada tepi elemen untuk perakitan mereka menjadi struktur sayap tunggal. Juga, sebuah tempat dipotong di sayap untuk menempatkan transceiver radio, drive untuk ailerons, kabel dan peralatan lainnya; di tempat-tempat yang diperlukan, potongan-potongan yang dicetak pada printer 3D melekat pada potongan-potongan untuk peralatan.Di tempat-tempat di mana konsol sayap terhubung ke sayap tengah, pengencang untuk balok longitudinal juga disediakan, di ujungnya terdapat mesin helikopter. Perlengkapan dari konsol sayap, balok helikopter dan bulu-bulu dicetak dengan nilon menggunakan teknologi SLS dengan peningkatan akurasi. Dudukan motor copter dipotong laser dari kayu lapis dan direkatkan dengan resin poliester.
Tes Aliran Propeller Pesawat dalam ANSYS FasihKetika mengerjakan struktur, perhatian khusus harus diberikan pada badan dan sayap pesawat terbang, karena mereka memiliki jumlah suku cadang maksimum dan memiliki dampak terbesar pada daya dukung dan dinamika pesawat. Pendekatan khusus untuk elemen-elemen ini diperlukan tidak hanya selama pengembangan, tetapi juga selama perakitan, karena itu perlu untuk membuat mereka seringan mungkin, sambil mempertahankan kekuatan mereka yang cukup.Sayap pesawat terbuat dari tiga komponen: bagian tengah dan konsol kanan dan kiri. Dasar untuk pembangunan sayap adalah busa polystyrene diekstrusi. Bagian sayap dirancang agar permukaannya lurus, dan berkat ini, mesin kawat CNC dapat digunakan untuk memotong poliester dengan akurat. Setelah itu, poliester prefabrikasi menjadi sasaran pemrosesan tambahan untuk meningkatkan kekuatan mereka dan meningkatkan kinerja aerodinamis. Jadi, bagian tengah kosong dilaminasi dengan serat karbon dan resin poliester; untuk menjaga benda kerja tetap halus dan rata, selama periode laminasi dibungkus dengan plexiglass, ditempatkan dalam kantong vakum dan dipasang di busa polystyrene negatif.Itu tidak mungkin untuk menggunakan serat karbon untuk pembuatan konsol sayap, termasuk untuk alasan itu diperlukan untuk menempatkan peralatan transmisi radio di bagian ini (batubara menciptakan gangguan), sehingga konsol dilaminasi dengan lapisan fiberglass dan lapisan balsa. Ikat dibuat pada tepi elemen untuk perakitan mereka menjadi struktur sayap tunggal. Juga, sebuah tempat dipotong di sayap untuk menempatkan transceiver radio, drive untuk ailerons, kabel dan peralatan lainnya; di tempat-tempat yang diperlukan, potongan-potongan yang dicetak pada printer 3D melekat pada potongan-potongan untuk peralatan.Ikat dibuat pada tepi elemen untuk perakitan mereka menjadi struktur sayap tunggal. Juga, sebuah tempat dipotong di sayap untuk menempatkan transceiver radio, drive untuk ailerons, kabel dan peralatan lainnya; di tempat-tempat yang diperlukan, potongan-potongan yang dicetak pada printer 3D melekat pada potongan-potongan untuk peralatan.Ikat dibuat pada tepi elemen untuk perakitan mereka menjadi struktur sayap tunggal. Juga, sebuah tempat dipotong di sayap untuk menempatkan transceiver radio, drive untuk ailerons, kabel dan peralatan lainnya; di tempat-tempat yang diperlukan, potongan-potongan yang dicetak pada printer 3D melekat pada potongan-potongan untuk peralatan.Di tempat-tempat di mana konsol sayap terhubung ke sayap tengah, pengencang untuk balok longitudinal juga disediakan, di ujungnya terdapat mesin helikopter. Perlengkapan dari konsol sayap, balok helikopter dan bulu-bulu dicetak dengan nilon menggunakan teknologi SLS dengan peningkatan akurasi. Dudukan motor copter dipotong laser dari kayu lapis dan direkatkan dengan resin poliester. Bagian tengah dalam proses pembuatanBingkai case juga terbuat dari triplek. Bagian-bagian yang diperlukan dipotong dari kayu lapis dengan laser, dan kemudian direkatkan ke dalam struktur tunggal menggunakan lem cyanoacrylate. Bingkai disisipkan dengan balsa, diperkuat pada hidung dan ditekuk dengan serat karbon, dan kemudian dilaminasi dengan fiberglass. Desain menyediakan ruang untuk kamera dengan stabilizer (depan lambung), baterai (belakang lambung), serta komputer on-board dan pengontrol penerbangan (tengah lambung). Selain itu, koneksi dikembangkan untuk boom sayap dan ekor, yang memungkinkan untuk dengan mudah memposisikan kabel daya dan sinyal di dalam struktur pesawat.Stabilizer dan elevator dibuat dengan metode yang mirip dengan pembuatan sayap pesawat terbang.
Bagian tengah dalam proses pembuatanBingkai case juga terbuat dari triplek. Bagian-bagian yang diperlukan dipotong dari kayu lapis dengan laser, dan kemudian direkatkan ke dalam struktur tunggal menggunakan lem cyanoacrylate. Bingkai disisipkan dengan balsa, diperkuat pada hidung dan ditekuk dengan serat karbon, dan kemudian dilaminasi dengan fiberglass. Desain menyediakan ruang untuk kamera dengan stabilizer (depan lambung), baterai (belakang lambung), serta komputer on-board dan pengontrol penerbangan (tengah lambung). Selain itu, koneksi dikembangkan untuk boom sayap dan ekor, yang memungkinkan untuk dengan mudah memposisikan kabel daya dan sinyal di dalam struktur pesawat.Stabilizer dan elevator dibuat dengan metode yang mirip dengan pembuatan sayap pesawat terbang.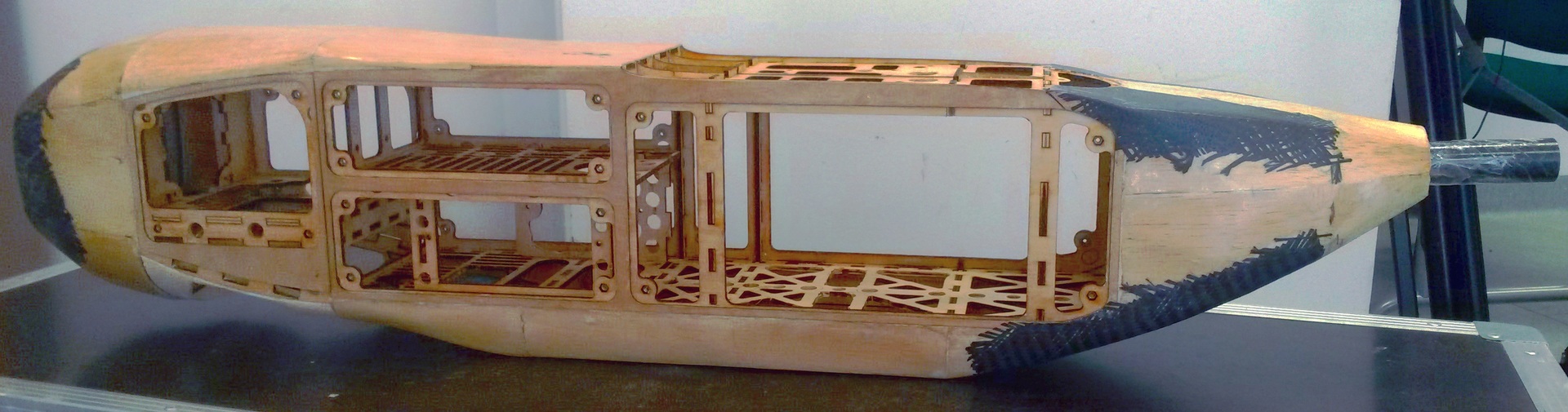 Bingkai UAV
Bingkai UAVBagian daya
Sebagai motor pengangkat untuk perangkat, kami mengambil yang terbesar bagi kami di area akses operasional - T-MOTOR U8 Pro 170KV dengan baling-baling kayu berdiameter 20 inci yang direkomendasikan oleh T-MOTOR untuk motor-motor ini. ESC'i T-MOTOR FLAME 80A dipilih untuk mengontrol kecepatan motor. Didukung oleh dua baterai lithium-polimer enam sel Tattu 22000mah yang terhubung secara seri, pembangkit listrik semacam itu memungkinkan kami untuk mendapatkan traksi vertikal maksimum 20 kilogram.Untuk tenaga penggerak, kami memilih motor Scorpion HKIII 4035 500KV dengan ESC FOXY XR-120 OPTO yang ditenagai oleh baterai yang sama dengan yang digunakan oleh motor copter.Berat lepas landas terakhir dari pesawat dengan semua peralatan di dalamnya keluar sama dengan 14 kilogram. Kecepatan maksimum pesawat adalah 40 m / s, kecepatan jelajah adalah 25 m / s, kecepatan kios aliran adalah 18 m / s, durasi penerbangan dalam mode pesawat lebih dari satu jam, jangkauan penerbangan hingga 100 km, yang seharusnya memungkinkan kami untuk melakukan misi bahkan dalam kondisi cuaca buruk.Sistem visi komputer
Bagian penting dari pesawat utama bagi kami adalah sistem visi komputer on-board, yang tanpanya mustahil menemukan Joe dan menyelesaikan misi. Elemen utama sistem ini adalah kamera JAI GO 2400 RGB dengan transfer full-frame dan resolusi Full HD, dan komputer mini GIGABYTE BXi7-5775 yang kuat. Kamera dipasang pada suspensi menstabilkan desain mekanik asli kami di bawah kendali controller Alexmos - ini memungkinkan kami untuk mendapatkan gambar dengan tingkat kemiringan yang konstan terhadap tanah, sehingga siluet seseorang pada mereka jelas dapat dibedakan. Komputer terhubung ke pengontrol penerbangan untuk memberikan data dan perintah telemetri. Selain itu, menggunakan modem 4G, komputer diberikan akses ke server FTP,melalui mana komunikasi dibuat dengan stasiun operator sistem visi komputer. Algoritma dari program yang kami luncurkan di papan dijelaskan secara singkat di paragraf berikutnya.Setelah menerima gambar dari kamera, paket data telemetri terakhir yang diterima dari pengontrol penerbangan segera dilampirkan, jadi untuk setiap piksel dalam gambar, Anda dapat secara kasar menghitung koordinat geografisnya. Setelah ini, bidang yang diminati dicari: untuk ini, histogram gambar dibangun, dan level dipilih di dalamnya, jumlah piksel yang lebih besar dari nilai ambang batas tertentu - ini adalah tingkat wilayah "tidak menarik", dan piksel yang sesuai tidak dipertimbangkan lebih lanjut. Pixel "menarik" yang tersisa menjalani operasi erosi morfologis, sehingga hanya piksel yang digabungkan ke dalam grup yang tersisa - grup ini diurutkan berdasarkan konsentrasi, ukuran, dan warna, dan sebagai hasilnya kami mendapatkan kelompok peringkat area pada gambar yang setidaknya mungkin terlihat serupa per orang.Setelah itu, untuk masing-masing bidang ini, kami menghitungDeskriptor HOG dan menggunakan vektor vektor dukungan, kami mengklasifikasikannya sebagai orang atau bukan. Jika suatu wilayah diklasifikasikan sebagai seseorang, ini tidak berarti bahwa kami segera benar-benar mempertimbangkannya - ia hanya menerima nilai tambah yang signifikan dalam peringkat. Setelah itu, gambar dari semua bidang yang ditemukan menarik dikirim ke server FTP dalam urutan yang sesuai dengan peringkat mereka. File dari masing-masing gambar tersebut mencakup informasi tentang geolokasi wilayah dan pengidentifikasi gambar penuh dari mana wilayah tersebut diambil.Aplikasi di stasiun operator memungkinkan Anda untuk melihat gambar bidang yang diunggah oleh mesin ke server FTP bersama-sama dengan peta area tempat perangkat tersebut terbang, dan mengurutkannya berdasarkan peringkat dan waktu. Jika suatu bidang tertentu menyebabkan operator mencurigai, maka ia, lagi-lagi melalui server FTP, dapat mengirim permintaan ke pesawat, sehingga ia mengunggah ke server foto lengkap yang sesuai dengan bidang minat yang dipilih. Selain itu, jika dalam salah satu bidang yang diperlihatkan minat operator mengenali orang yang ia cari, ia dapat mengirim koordinat pendaratan yang diinginkannya ke komputer, dan komputer akan meneruskannya ke pengontrol penerbangan.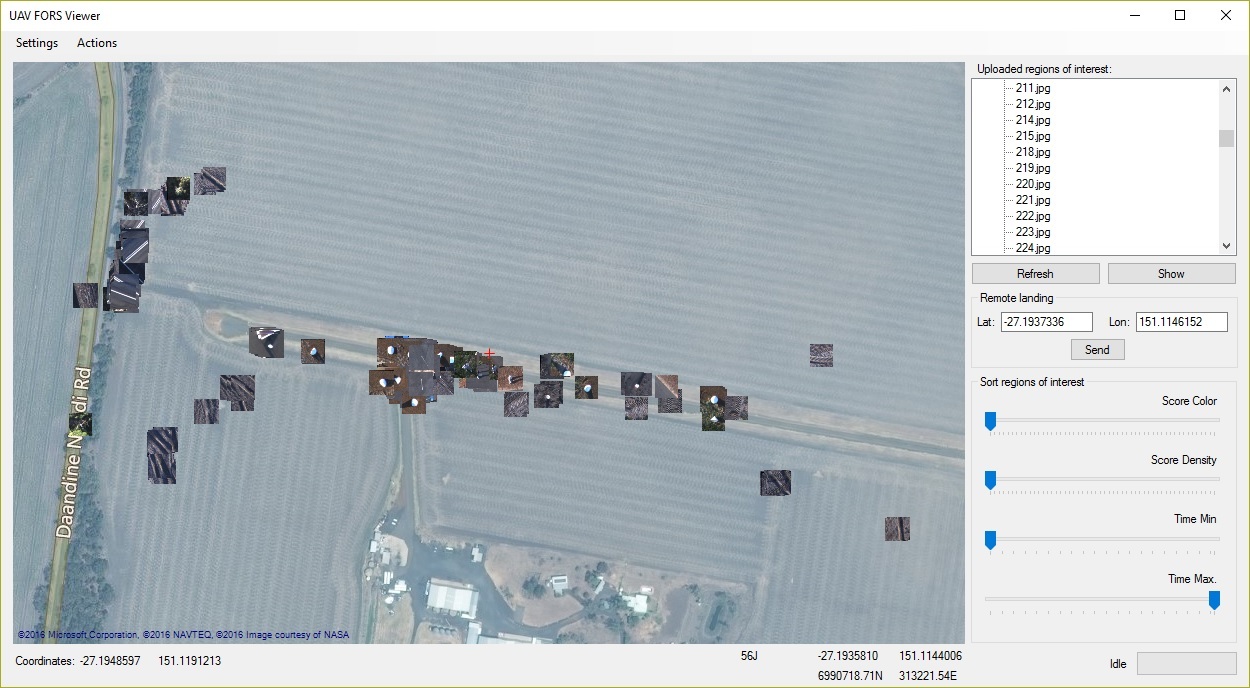 Aplikasi di ruang operatorMesin vektor pendukung untuk mengklasifikasikan seseorang dilatih oleh kami pada contoh foto yang diambil selama penerbangan uji. Sebelum menghitung deskriptor HOG dari masing-masing bidang yang diminati, kami melakukan beberapa transformasi geometris pada area tersebut sehingga membawa orang yang berpotensi dalam gambar ke posisi vertikal, karena HOG tradisional berfungsi dengan baik untuk mengklasifikasikan seseorang hanya dalam posisi berdiri.Klasifikasi wilayah yang diminati di atas drone: garis merah - wilayah tersebut diklasifikasikan sebagai bukan-orang; garis hijau - wilayah diklasifikasikan sebagai orang.Karena tugasnya bukan hanya untuk menemukan seseorang, tetapi juga untuk memilih tempat yang cocok untuk mendarat, di samping operasi di atas, sistem visi komputer pada pesawat utama diprogram untuk mengklasifikasikan wilayah tempat pesawat terbang. Di antara kelas yang mungkin diidentifikasi: tanah, aspal, rumput, semak-semak dan pohon, hambatan yang tidak ditentukan; Klasifikasi didasarkan pada informasi tentang warna dan heterogenitas gambar di suatu tempat. Ketika operator stasiun kerja perlu membuat keputusan tentang lokasi pendaratan, ia dapat meminta informasi dari pesawat tentang klasifikasi bagian peta yang menarik.
Aplikasi di ruang operatorMesin vektor pendukung untuk mengklasifikasikan seseorang dilatih oleh kami pada contoh foto yang diambil selama penerbangan uji. Sebelum menghitung deskriptor HOG dari masing-masing bidang yang diminati, kami melakukan beberapa transformasi geometris pada area tersebut sehingga membawa orang yang berpotensi dalam gambar ke posisi vertikal, karena HOG tradisional berfungsi dengan baik untuk mengklasifikasikan seseorang hanya dalam posisi berdiri.Klasifikasi wilayah yang diminati di atas drone: garis merah - wilayah tersebut diklasifikasikan sebagai bukan-orang; garis hijau - wilayah diklasifikasikan sebagai orang.Karena tugasnya bukan hanya untuk menemukan seseorang, tetapi juga untuk memilih tempat yang cocok untuk mendarat, di samping operasi di atas, sistem visi komputer pada pesawat utama diprogram untuk mengklasifikasikan wilayah tempat pesawat terbang. Di antara kelas yang mungkin diidentifikasi: tanah, aspal, rumput, semak-semak dan pohon, hambatan yang tidak ditentukan; Klasifikasi didasarkan pada informasi tentang warna dan heterogenitas gambar di suatu tempat. Ketika operator stasiun kerja perlu membuat keputusan tentang lokasi pendaratan, ia dapat meminta informasi dari pesawat tentang klasifikasi bagian peta yang menarik.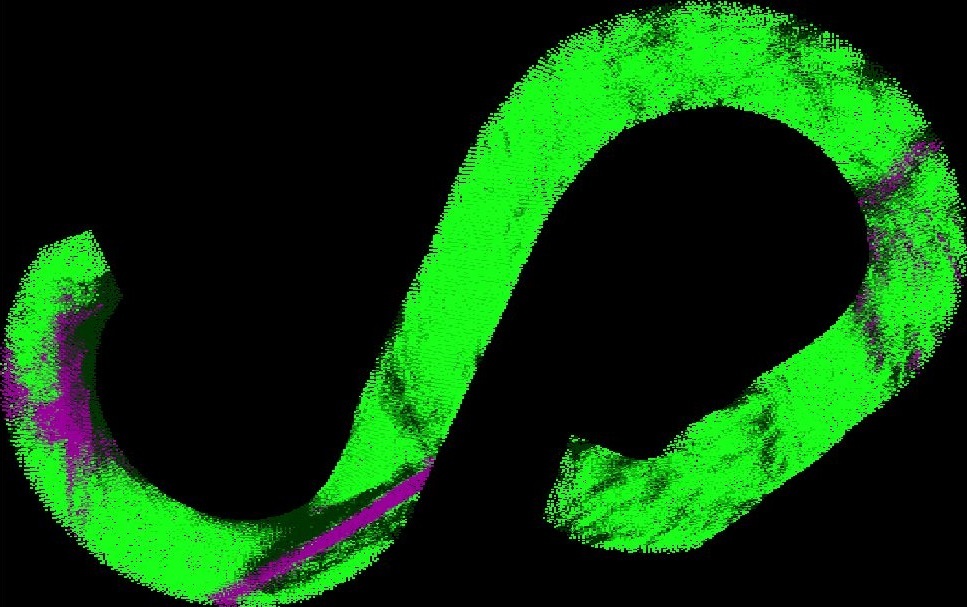 : - — , - — , —Selain drone utama yang dijelaskan, kami memutuskan untuk menggunakan drone tambahan, yang akan bertanggung jawab untuk menyampaikan dalam saluran komunikasi antara stasiun darat operator dan pesawat utama. Memang, jika pesawat tak berawak utama kami berjarak beberapa kilometer dari stasiun bumi, maka mempertahankan komunikasi radio langsung untuk menerima data telemetri dan perintah transmisi menjadi bermasalah, baik karena penurunan daya sinyal dengan meningkatnya jarak, dan karena munculnya hambatan pada garis pandang antara antena di tanah dan di papan perangkat. Tidak selalu mungkin untuk mengatasi kesulitan membangun komunikasi radio langsung dengan meningkatkan daya sinyal, karena, pertama, ada pembatasan negara yang menentukan daya sinyal radio maksimum yang diizinkan, dan kedua,peningkatan daya mungkin tidak membawa hasil positif, terutama ketika pesawat berada di ketinggian rendah pada jarak yang sangat jauh. Kami memecahkan masalah ini dengan menambahkan repeater, yang terletak di ketinggian tinggi, di garis pandang baik dari stasiun operator dan dari pesawat "bekerja".Untuk mentransfer peralatan relai, kami menggunakan sayap terbang, dibuat berdasarkan platform Skywalker X8 yang agak populer. Dalam hal ini, sayap terbang cocok dengan pembatasan yang disebabkan oleh lanskap yang tidak diketahui dari landasan peluncuran, karena dapat diluncurkan dari ketapel ringan atau dari bungee, dan dapat mendarat secara otomatis, tanpa memerlukan ruang terbuka yang signifikan untuk ini. Agar pesawat dapat mendarat tanpa roda pendaratan, tanpa menerima kerusakan signifikan, kami melapisi bagian bawah lambung dengan Kevlar dan fiberglass. Selain itu, untuk meningkatkan kekuatan struktural dan memberikan kemungkinan terbang dengan kecepatan yang lebih tinggi, ujung depan sayap juga dilaminasi dengan fiberglass. X8 dilengkapi dengan mesin 710 KV yang diperingkat untuk baterai polimer lithium lima sel,dan baterai untuk mesin ini selama 16 jam enam sel. Karena kami menggunakan baterai dengan voltase lebih tinggi dari voltase pengenal mesin, kami harus menyediakan asupan udara tambahan untuk pendinginan dalam desain. Untuk mesin, pengatur kecepatan 70 A dan baling-baling lipat 9,5x8 digunakan. Di elevons, kami memberikan servo HS-5625MG berkualitas tinggi dari Hitec; server memiliki margin yang signifikan dalam kinerja, yang harus meminimalkan kemungkinan kehilangan permukaan kontrol, yang masing-masing sangat penting dalam kasus sayap terbang. Selain itu, ada juga tambahan baterai kecil untuk avionik dan sistem terminasi penerbangan darurat, serta pengontrol penerbangan (Pixhawk). Akibatnya, karakteristik perangkat adalah sebagai berikut: berat - 3,5 kilogram,kecepatan maksimum - 35 m / s, kecepatan jelajah - 25 m / s, waktu penerbangan - hingga 55 menit, jarak tempuh - lebih dari 80 km.
: - — , - — , —Selain drone utama yang dijelaskan, kami memutuskan untuk menggunakan drone tambahan, yang akan bertanggung jawab untuk menyampaikan dalam saluran komunikasi antara stasiun darat operator dan pesawat utama. Memang, jika pesawat tak berawak utama kami berjarak beberapa kilometer dari stasiun bumi, maka mempertahankan komunikasi radio langsung untuk menerima data telemetri dan perintah transmisi menjadi bermasalah, baik karena penurunan daya sinyal dengan meningkatnya jarak, dan karena munculnya hambatan pada garis pandang antara antena di tanah dan di papan perangkat. Tidak selalu mungkin untuk mengatasi kesulitan membangun komunikasi radio langsung dengan meningkatkan daya sinyal, karena, pertama, ada pembatasan negara yang menentukan daya sinyal radio maksimum yang diizinkan, dan kedua,peningkatan daya mungkin tidak membawa hasil positif, terutama ketika pesawat berada di ketinggian rendah pada jarak yang sangat jauh. Kami memecahkan masalah ini dengan menambahkan repeater, yang terletak di ketinggian tinggi, di garis pandang baik dari stasiun operator dan dari pesawat "bekerja".Untuk mentransfer peralatan relai, kami menggunakan sayap terbang, dibuat berdasarkan platform Skywalker X8 yang agak populer. Dalam hal ini, sayap terbang cocok dengan pembatasan yang disebabkan oleh lanskap yang tidak diketahui dari landasan peluncuran, karena dapat diluncurkan dari ketapel ringan atau dari bungee, dan dapat mendarat secara otomatis, tanpa memerlukan ruang terbuka yang signifikan untuk ini. Agar pesawat dapat mendarat tanpa roda pendaratan, tanpa menerima kerusakan signifikan, kami melapisi bagian bawah lambung dengan Kevlar dan fiberglass. Selain itu, untuk meningkatkan kekuatan struktural dan memberikan kemungkinan terbang dengan kecepatan yang lebih tinggi, ujung depan sayap juga dilaminasi dengan fiberglass. X8 dilengkapi dengan mesin 710 KV yang diperingkat untuk baterai polimer lithium lima sel,dan baterai untuk mesin ini selama 16 jam enam sel. Karena kami menggunakan baterai dengan voltase lebih tinggi dari voltase pengenal mesin, kami harus menyediakan asupan udara tambahan untuk pendinginan dalam desain. Untuk mesin, pengatur kecepatan 70 A dan baling-baling lipat 9,5x8 digunakan. Di elevons, kami memberikan servo HS-5625MG berkualitas tinggi dari Hitec; server memiliki margin yang signifikan dalam kinerja, yang harus meminimalkan kemungkinan kehilangan permukaan kontrol, yang masing-masing sangat penting dalam kasus sayap terbang. Selain itu, ada juga tambahan baterai kecil untuk avionik dan sistem terminasi penerbangan darurat, serta pengontrol penerbangan (Pixhawk). Akibatnya, karakteristik perangkat adalah sebagai berikut: berat - 3,5 kilogram,kecepatan maksimum - 35 m / s, kecepatan jelajah - 25 m / s, waktu penerbangan - hingga 55 menit, jarak tempuh - lebih dari 80 km. Perlu dicatat bahwa menambahkan pesawat tambahan ke sistem untuk meningkatkan area jangkauan komunikasi mengarah ke masalah pengorganisasian komunikasi itu sendiri, karena dalam kasus ini, selain menganalisis telemetri dari drone utama dan mengirimkan perintah kepadanya, stasiun pangkalan harus mendukung komunikasi skala penuh dengan pesawat tambahan aparatur. Tentu saja, komunikasi ini dapat diatur dengan menambahkan dua modem radio tambahan (satu untuk drone tambahan, lainnya untuk stasiun bumi) yang beroperasi di saluran yang tidak mengganggu peralatan yang sudah ada dalam sistem. Opsi ini, bagaimanapun, tidak optimal karena biaya tambahan dan kurangnya skalabilitas ketika menambahkan drone baru ke sistem.Pilihan terbaik adalah menggunakan transceiver radio yang ada di atasnya untuk berkomunikasi dengan pesawat tambahan. Dalam hal ini, skema komunikasi dalam sistem terlihat seperti yang ditunjukkan pada diagram di bawah ini.Skema komunikasi antara pesawat dan stasiun operatorSeperti dijelaskan di atas, sistem hanya memiliki tiga modem radio yang bertanggung jawab untuk menyelesaikan konflik transmisi ketika mengakses satu-satunya saluran radio yang mereka gunakan. Dua stasiun pangkalan yang digunakan untuk memantau dan mengontrol setiap pesawat menerima dan mengirimkan melalui modem radio yang sama, akses yang dikendalikan oleh aplikasi sakelar yang dipasang pada salah satu stasiun (dalam kasus kami, aplikasi ini adalah mavproxy). Pertukaran paket antara aplikasi pemantauan / manajemen dan aplikasi sakelar dilakukan menggunakan UDP.Catatan khusus adalah peran modul "Router" dalam skema komunikasi di atas. Modul ini hanya melewatkan paket yang berasal dari pengendali penerbangan atau stasiun pangkalan yang terhubung dengannya, dan membuat salah satu keputusan berikut tentang paket yang berasal dari modem radio yang terhubung: abaikan paket, kirim paket kembali ke modem radio, kirim paket ke pengendali penerbangan atau stasiun pangkalan yang terhubung . Router mengabaikan paket jika telah ditemui oleh router ini sebelumnya. Jika paket belum pernah ditemukan sebelumnya, tetapi tidak ditujukan untuk perangkat yang terhubung dengan router, maka paket tersebut dikirim kembali ke modem radio. Dalam kasus lain, paket dikirim ke perangkat yang terhubung ke router. Selama tes terakhir kami,karena asumsi tentang posisi relatif pesawat, pada router di drone utama dan stasiun pangkalan, kami menonaktifkan opsi pengiriman paket kembali ke modem radio untuk mengurangi beban pada saluran radio.Mengenai masalah penentuan oleh router apakah paket yang diterima ditujukan untuk perangkat ini, solusinya tidak sepenuhnya sepele. Faktanya adalah bahwa untuk komunikasi dengan pesawat kita menggunakan protokol mavlink, yang merupakan standar de facto untuk drone khusus. Header mavlink tidak mengandung informasi tentang penerima paket, meskipun ada sub-sistem pengidentifikasi dan pengirim. Dalam kasus kami, hanya pengendali penerbangan dari peralatan bantu yang harus berurusan dengan interpretasi perintah dari "Base Station 1", dan hanya pengendali penerbangan dari peralatan utama dari "Base Station 2", sehingga kami dapat mengurutkan paket hanya dengan ID pengirim. Solusi ini bekerja dengan cukup andal, tetapi, sekali lagi, berskala kecil dan perlu diproses lebih lanjut.Paket penyaringan router yang berasal darimodem radio Kami menggunakan RFD 868+ sebagai modem radio. Router dibuat oleh kami berdasarkan STM32 Nucleo, yang kami tambahkan perisai untuk menyederhanakan catu daya ke papan, untuk memperluas kemungkinan komunikasi dan indikasi.
Perlu dicatat bahwa menambahkan pesawat tambahan ke sistem untuk meningkatkan area jangkauan komunikasi mengarah ke masalah pengorganisasian komunikasi itu sendiri, karena dalam kasus ini, selain menganalisis telemetri dari drone utama dan mengirimkan perintah kepadanya, stasiun pangkalan harus mendukung komunikasi skala penuh dengan pesawat tambahan aparatur. Tentu saja, komunikasi ini dapat diatur dengan menambahkan dua modem radio tambahan (satu untuk drone tambahan, lainnya untuk stasiun bumi) yang beroperasi di saluran yang tidak mengganggu peralatan yang sudah ada dalam sistem. Opsi ini, bagaimanapun, tidak optimal karena biaya tambahan dan kurangnya skalabilitas ketika menambahkan drone baru ke sistem.Pilihan terbaik adalah menggunakan transceiver radio yang ada di atasnya untuk berkomunikasi dengan pesawat tambahan. Dalam hal ini, skema komunikasi dalam sistem terlihat seperti yang ditunjukkan pada diagram di bawah ini.Skema komunikasi antara pesawat dan stasiun operatorSeperti dijelaskan di atas, sistem hanya memiliki tiga modem radio yang bertanggung jawab untuk menyelesaikan konflik transmisi ketika mengakses satu-satunya saluran radio yang mereka gunakan. Dua stasiun pangkalan yang digunakan untuk memantau dan mengontrol setiap pesawat menerima dan mengirimkan melalui modem radio yang sama, akses yang dikendalikan oleh aplikasi sakelar yang dipasang pada salah satu stasiun (dalam kasus kami, aplikasi ini adalah mavproxy). Pertukaran paket antara aplikasi pemantauan / manajemen dan aplikasi sakelar dilakukan menggunakan UDP.Catatan khusus adalah peran modul "Router" dalam skema komunikasi di atas. Modul ini hanya melewatkan paket yang berasal dari pengendali penerbangan atau stasiun pangkalan yang terhubung dengannya, dan membuat salah satu keputusan berikut tentang paket yang berasal dari modem radio yang terhubung: abaikan paket, kirim paket kembali ke modem radio, kirim paket ke pengendali penerbangan atau stasiun pangkalan yang terhubung . Router mengabaikan paket jika telah ditemui oleh router ini sebelumnya. Jika paket belum pernah ditemukan sebelumnya, tetapi tidak ditujukan untuk perangkat yang terhubung dengan router, maka paket tersebut dikirim kembali ke modem radio. Dalam kasus lain, paket dikirim ke perangkat yang terhubung ke router. Selama tes terakhir kami,karena asumsi tentang posisi relatif pesawat, pada router di drone utama dan stasiun pangkalan, kami menonaktifkan opsi pengiriman paket kembali ke modem radio untuk mengurangi beban pada saluran radio.Mengenai masalah penentuan oleh router apakah paket yang diterima ditujukan untuk perangkat ini, solusinya tidak sepenuhnya sepele. Faktanya adalah bahwa untuk komunikasi dengan pesawat kita menggunakan protokol mavlink, yang merupakan standar de facto untuk drone khusus. Header mavlink tidak mengandung informasi tentang penerima paket, meskipun ada sub-sistem pengidentifikasi dan pengirim. Dalam kasus kami, hanya pengendali penerbangan dari peralatan bantu yang harus berurusan dengan interpretasi perintah dari "Base Station 1", dan hanya pengendali penerbangan dari peralatan utama dari "Base Station 2", sehingga kami dapat mengurutkan paket hanya dengan ID pengirim. Solusi ini bekerja dengan cukup andal, tetapi, sekali lagi, berskala kecil dan perlu diproses lebih lanjut.Paket penyaringan router yang berasal darimodem radio Kami menggunakan RFD 868+ sebagai modem radio. Router dibuat oleh kami berdasarkan STM32 Nucleo, yang kami tambahkan perisai untuk menyederhanakan catu daya ke papan, untuk memperluas kemungkinan komunikasi dan indikasi.Kesimpulan
Menurut persyaratan kompetisi, untuk perjalanan ke bagian akhir, masing-masing pesawat yang dijelaskan terbang lebih dari lima jam; Selama penerbangan uji ini, kami telah mengidentifikasi dan memperbaiki banyak masalah dan kesalahan kecil dan signifikan. Laporan video kami untuk tahap ini terlihat seperti ini:Salah satu kesalahan paling tidak menyenangkan dalam desain mekanik yang kami perhatikan selama penerbangan persiapan adalah asimetri yang signifikan dari beban pada motor helikopter selama konversi dari mode pesawat ke helikopter. Faktanya adalah bahwa sudut positif serangan sayap pesawat pada kecepatan rendah mengalihkan balok dengan helikopter kembali, sehingga dua motor lebih dekat ke ekor pesawat menerima beban besar selama konversi. Selain itu, momen reaktif dari baling-baling pesawat menciptakan beban tambahan pada motor di sisi kiri, sehingga motor belakang kiri adalah yang paling kuat. Dalam kasus kami, ketidakrataan tersebut beberapa kali menyebabkan kegagalan fungsi pembangkit listrik dan perilaku pesawat yang tidak stabil, yang pernah berakhir dengan musim gugur dengan kerusakan parah pada lambung kapal. Pada saat ituketika kami mengidentifikasi alasan perilaku perangkat yang salah (tiga bulan sebelum kompetisi), sudah terlambat untuk membuat perubahan pada mekanik atau mencoba menyesuaikan program konversi, jadi kami mengambil risiko untuk terus berpartisipasi dalam tantangan, mengetahui bahwa desain kami tidak memiliki redundansi jika terjadi kecelakaan. . Namun demikian, kami mencoba dengan segala cara yang mungkin untuk meminimalkan kemungkinan kerusakan, sebanyak mungkin mengendalikan kemudahan servis semua elemen, koneksi, dan perlengkapan sebelum setiap penerbangan.kami mencoba dengan segala cara yang mungkin untuk meminimalkan kemungkinan kerusakan, sambil secara maksimal mengendalikan kemudahan servis semua elemen, koneksi, dan perlengkapan sebelum setiap penerbangan.kami mencoba dengan segala cara yang mungkin untuk meminimalkan kemungkinan kerusakan, sambil secara maksimal mengendalikan kemudahan servis semua elemen, koneksi, dan perlengkapan sebelum setiap penerbangan.Sayangnya, tindakan pencegahan yang kami ambil tidak cukup, dan quad-pesawat kami jatuh pada salah satu uji penerbangan yang kami lakukan di Australia untuk memeriksa integritas struktural setelah memasang perangkat di lokasi kompetisi. Jika terjadi tabrakan, seluruh struktur mengalami kerusakan yang signifikan, sehingga tidak mungkin untuk memperbaiki peralatan dan mencoba untuk menyelesaikan setidaknya sebagian dari misi. Penyelenggara, bagaimanapun, bersimpati dengan situasi kami dan memberi kami izin untuk terbang dengan perangkat tambahan untuk memeriksa jangkauan komunikasi radio kami dan kemampuan untuk mengontrol perangkat di luar garis pandang.Pada akhirnya, perlu dikatakan bahwa tidak ada satu pun tim tahun ini yang dapat sepenuhnya memenuhi misi kompetisi, yang dikaitkan dengan hilangnya pesawat karena berbagai alasan: kecelakaan, kebakaran, penerbangan di luar ruang penerbangan yang ditentukan dan, sebagai aturan, melayang di atas pohon. Selama tantangan, tim dari TU Delft (desain mekanik asli dan model uji sistem penglihatan komputer dari Parrot, sebuah video tentang drone di sini ) dan Canberra UAV (mengirimkan sampel darah, tetapi menabrak helikopter bantu, video tentang drone di sini ) paling banyak dicatat .Bagi kami, seperti untuk tim lain, tantangan berfungsi sebagai platform yang sangat baik untuk mencoba tangan kami dan berkomunikasi dengan profesional drone dari seluruh dunia. Kami memperoleh pengalaman hebat dan mengumpulkan banyak materi yang akan membantu kami lebih jauh dalam proyek pribadi kami dan dalam persiapan untuk kompetisi berikutnya.Material
" Peraturan UAV Challenge Medical Express 2016." Sebuah artikel dari penyelenggara tantangan tentang statistik dan sejarah kompetisi.» Deskripsi keberhasilan Canberra UAV oleh Andrew Trijell, pemimpin ideologis tim.Source: https://habr.com/ru/post/id399699/
All Articles