Para ilmuwan telah mengembangkan chip untuk perencanaan pergerakan robot real-time
 Jika Anda pernah melihat cara kerja robot versi demo, maka Anda mungkin memperhatikan bahwa robot dapat "membeku" untuk waktu yang lama sebelum terus bergerak. Anda mungkin berpikir bahwa dengan cara ini robot merenungkan pada titik apa dan di sepanjang jalur mana untuk bergerak. Asumsi ini tidak jauh dari kebenaran: pada saat ini, prosesor memproses operasi perencanaan gerak, yang seringkali membutuhkan banyak waktu.Para peneliti di Universitas Duke telah menemukan cara untuk mempercepat perencanaan gerakan robot tiga kali dengan menggunakan kekuatan satu-dua puluh yang dibutuhkan saat ini. Inti dari solusi mereka adalah prosesor khusus yang dapat melakukan bagian pekerjaan yang paling memakan waktu - memeriksa semua kemungkinan tabrakan di seluruh rentang pergerakan robot - dengan efisiensi tinggi.Perencanaan gerak, misalnya, untuk lengan robot terutama melibatkan pembuatan peta rute probabilistik. Ini adalah grafik yang terdiri dari titik-titik di ruang bebas hambatan dengan garis rusuk yang menghubungkan titik-titik ini sehingga setiap gerakan di antara mereka tidak mengarah ke tabrakan. Faktanya, perencana gerakan memilih titik awal dan akhir pada grafik, dan kemudian menentukan cara paling efektif untuk berpindah dari satu titik ke titik lainnya.
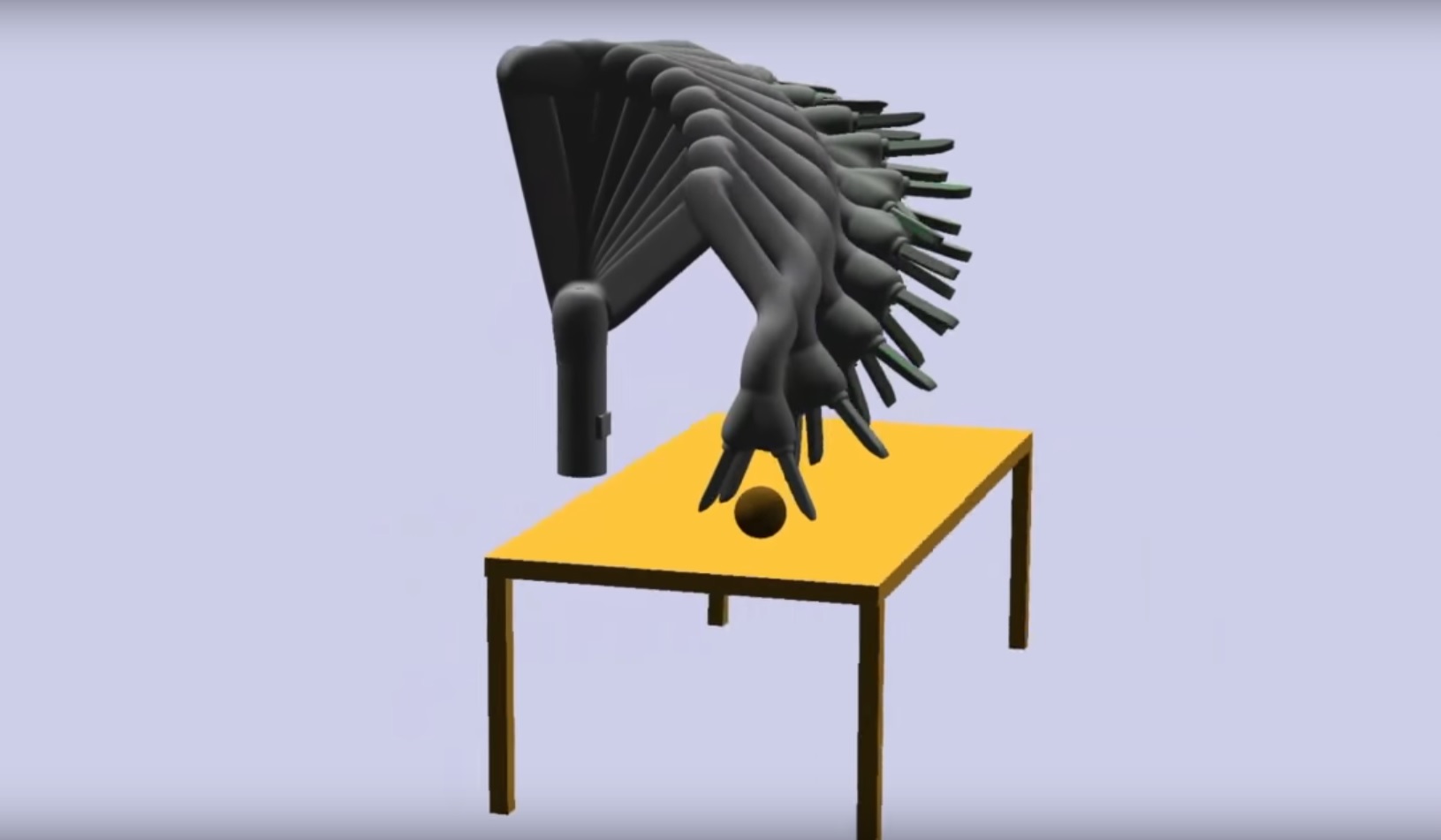
Jika Anda pernah melihat cara kerja robot versi demo, maka Anda mungkin memperhatikan bahwa robot dapat "membeku" untuk waktu yang lama sebelum terus bergerak. Anda mungkin berpikir bahwa dengan cara ini robot merenungkan pada titik apa dan di sepanjang jalur mana untuk bergerak. Asumsi ini tidak jauh dari kebenaran: pada saat ini, prosesor memproses operasi perencanaan gerak, yang seringkali membutuhkan banyak waktu.Para peneliti di Universitas Duke telah menemukan cara untuk mempercepat perencanaan gerakan robot tiga kali dengan menggunakan kekuatan satu-dua puluh yang dibutuhkan saat ini. Inti dari solusi mereka adalah prosesor khusus yang dapat melakukan bagian pekerjaan yang paling memakan waktu - memeriksa semua kemungkinan tabrakan di seluruh rentang pergerakan robot - dengan efisiensi tinggi.Perencanaan gerak, misalnya, untuk lengan robot terutama melibatkan pembuatan peta rute probabilistik. Ini adalah grafik yang terdiri dari titik-titik di ruang bebas hambatan dengan garis rusuk yang menghubungkan titik-titik ini sehingga setiap gerakan di antara mereka tidak mengarah ke tabrakan. Faktanya, perencana gerakan memilih titik awal dan akhir pada grafik, dan kemudian menentukan cara paling efektif untuk berpindah dari satu titik ke titik lainnya. Algoritme perencanaan gerak mencari jalur optimal dari satu titik ke titik lainnya, yang memungkinkan Anda menghindari rintangan (kiri). Peta rute probabilistik dengan tepi yang menghubungkan titik-titik di ruang kosong (kanan).Secara teori, ini terdengar sangat sederhana, tetapi dalam praktiknya, Anda perlu memperhitungkan fakta bahwa Anda bekerja dengan lengan robot. Dan ketika sikat bergerak dari satu titik ke titik lain, lengan bawah bisa bertabrakan dengan penghalang. Area di mana lengan robot bergerak disebut "volume kerja".
Algoritme perencanaan gerak mencari jalur optimal dari satu titik ke titik lainnya, yang memungkinkan Anda menghindari rintangan (kiri). Peta rute probabilistik dengan tepi yang menghubungkan titik-titik di ruang kosong (kanan).Secara teori, ini terdengar sangat sederhana, tetapi dalam praktiknya, Anda perlu memperhitungkan fakta bahwa Anda bekerja dengan lengan robot. Dan ketika sikat bergerak dari satu titik ke titik lain, lengan bawah bisa bertabrakan dengan penghalang. Area di mana lengan robot bergerak disebut "volume kerja".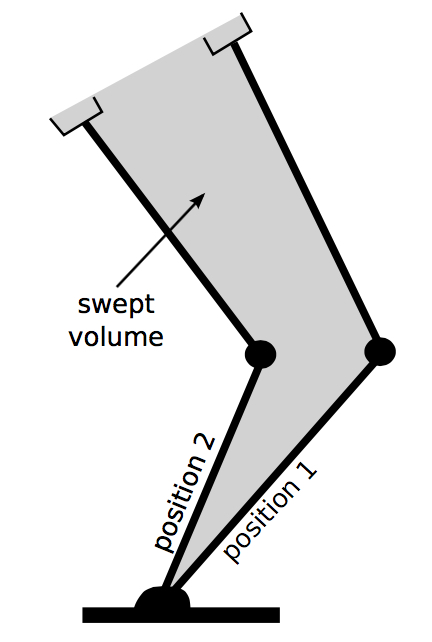 Volume kerja adalah ruang di mana robot mengubah posisinya dari satu posisi ke posisi lain.Hasil penelitian menunjukkan bahwa deteksi kendala membutuhkan lebih dari 99% dari waktu komputasi. Perhitungan pendahuluan dilakukan ketika robot dikonfigurasikan. Anda membuat satu peta, yang terdiri dari sekitar 150 ribu tepi, menggambarkan kemungkinan lintasan robot, sambil menghindari tabrakan diri dan tabrakan dengan hal-hal yang tidak mengubah posisi mereka, misalnya, gender.150 ribu iga terlalu banyak untuk prototipe sistem tim Universitas Duke. Jumlah yang lebih masuk akal mendekati 1000, sehingga para peneliti harus menemukan cara untuk mengurangi jumlah mereka.Untuk mempercepat dan menyederhanakan seluruh proses, para peneliti pertama-tama membuat model sekitar 10 ribu skenario dengan jumlah berbeda dari hambatan yang ditemukan secara acak dengan ukuran yang berbeda, dan kemudian memeriksa tepi mana pada peta yang digunakan oleh sistem untuk merencanakan pergerakan. Iga yang jarang digunakan dikeluarkan dari peta. Setelah beberapa iterasi mengurangi dan mengecek kembali hasilnya dalam satu contoh, jumlah tepi ternyata kurang dari seribu. Pada saat yang sama, pengurangan tidak mempengaruhi kemampuan untuk menyelesaikan dua masalah utama perencana gerak - kecepatan pemrosesan yang lambat dan konsumsi daya yang tinggi.Membatasi jumlah tepi pada peta ke beberapa nilai yang dapat diterima sangat penting, karena kemampuan prosesor yang memproses operasi perencanaan terbatas. Dalam hal ini, prosesor - programmable logic integrated circuit ( FPGA ) - diprogram dengan berbagai rangkaian pendeteksian tabrakan, yang masing-masing sesuai dengan satu sisi pada peta. Dengan demikian, ukuran kartu dibatasi oleh jumlah sirkuit seperti itu yang dapat ditampung pada FPGA - maksimum beberapa ribu.Teknologi para ilmuwan di Universitas Duke bekerja dengan memecah ruang kerja menjadi ribuan voxel. Algoritme kemudian menentukan apakah lintasan objek yang diprogram tertanam di salah satu voxels. Berkat FPGA, teknologi ini memeriksa ribuan rute secara bersamaan, dan kemudian menjahit jalur terpendek menggunakan opsi aman yang tersisa. Robot hanya bisa menjalankannya.Pada output, para ilmuwan menerima akselerasi yang signifikan: tidak peduli berapa banyak tepi pada kartu, kecepatan pemrosesan FPGA dari seluruh kartu adalah 50 nanodetik per piksel. Dalam satu contoh yang sangat kompleks, pemrosesan mengambil sedikit lebih dari 0,6 ms. Penjadwal, yang bekerja atas dasar prosesor Intel Xeon quad-core dengan frekuensi clock 3,5 gigahertz, diatasi dengan tugas ini dalam 2,738 ms. Prosesor konvensional mengkonsumsi sekitar 200-300 watt selama perencanaan pergerakan, dan pengembangan ilmuwan dari Duke University kurang dari 10 watt.Sekarang robot industri tidak menggunakan perencana gerak. Ketika datang ke, misalnya, perakitan jalur perakitan mobil menggunakan robot, lingkungan direncanakan sedemikian rupa sehingga robot dapat secara membabi buta mengulangi gerakan yang sama berulang-ulang. Mereka sama sekali tidak memiliki kesempatan untuk membuat kesalahan: bagian-bagian mobil setiap kali menemukan diri mereka di tempat yang sama, dan robot disimpan di dalam kotak khusus yang melampirkannya dari orang-orang. Tetapi jika robot menggunakan algoritma perencanaan gerakan waktu-nyata, itu tidak akan dapat dihalangi oleh orang-orang yang berkeliaran di masa lalu atau tidak berfungsinya sabuk konveyor - robot akan melakukan pekerjaan mereka dengan akurasi yang biasa.Perencanaan lalu lintas waktu nyata menghemat waktu dan biaya untuk rekayasa lingkungan lingkungan robot. Para ilmuwan telah mempelajari teknologi perencanaan selama 30 tahun terakhir, dan kemajuan terbaru telah memungkinkan untuk membuat rencana gerakan yang ditingkatkan dalam hitungan detik. Pendekatan yang ada, dengan beberapa pengecualian, bergantung pada kemampuan prosesor pusat atau lebih cepat, tetapi juga lebih banyak GPU yang mengkonsumsi energi. Menurut para ilmuwan, prosesor pusat pandai memecahkan berbagai jenis tugas, tetapi tidak dapat bersaing dengan prosesor yang dirancang khusus hanya untuk satu tugas tertentu.Dinesh Manocha, profesor di University of North Carolina di Chapel Hill, yang bekerja pada perencana gerakan waktu-nyata pada GPU, setuju bahwa FPGA memiliki potensi untuk meningkatkan efisiensi perencanaan gerak. Dia yakin bahwa pengembangan ilmuwan akan menemukan aplikasi praktisnya dalam waktu dekat: robot semakin banyak digunakan dalam kondisi baru yang tidak pasti, peran perencanaan lalu lintas hanya akan meningkat seiring waktu.Startup Realtime Robotics akan mengkomersialkan para ilmuwan teknologi. Sebagai bagian dari proyek ini, FPGA akan diganti dengan sirkuit terintegrasi khusus ( ASIC ), yang dapat menggabungkan lebih dari 100 ribu sisi. Pembaruan semacam itu akan memungkinkan robot bekerja di berbagai lingkungan yang luas.
Volume kerja adalah ruang di mana robot mengubah posisinya dari satu posisi ke posisi lain.Hasil penelitian menunjukkan bahwa deteksi kendala membutuhkan lebih dari 99% dari waktu komputasi. Perhitungan pendahuluan dilakukan ketika robot dikonfigurasikan. Anda membuat satu peta, yang terdiri dari sekitar 150 ribu tepi, menggambarkan kemungkinan lintasan robot, sambil menghindari tabrakan diri dan tabrakan dengan hal-hal yang tidak mengubah posisi mereka, misalnya, gender.150 ribu iga terlalu banyak untuk prototipe sistem tim Universitas Duke. Jumlah yang lebih masuk akal mendekati 1000, sehingga para peneliti harus menemukan cara untuk mengurangi jumlah mereka.Untuk mempercepat dan menyederhanakan seluruh proses, para peneliti pertama-tama membuat model sekitar 10 ribu skenario dengan jumlah berbeda dari hambatan yang ditemukan secara acak dengan ukuran yang berbeda, dan kemudian memeriksa tepi mana pada peta yang digunakan oleh sistem untuk merencanakan pergerakan. Iga yang jarang digunakan dikeluarkan dari peta. Setelah beberapa iterasi mengurangi dan mengecek kembali hasilnya dalam satu contoh, jumlah tepi ternyata kurang dari seribu. Pada saat yang sama, pengurangan tidak mempengaruhi kemampuan untuk menyelesaikan dua masalah utama perencana gerak - kecepatan pemrosesan yang lambat dan konsumsi daya yang tinggi.Membatasi jumlah tepi pada peta ke beberapa nilai yang dapat diterima sangat penting, karena kemampuan prosesor yang memproses operasi perencanaan terbatas. Dalam hal ini, prosesor - programmable logic integrated circuit ( FPGA ) - diprogram dengan berbagai rangkaian pendeteksian tabrakan, yang masing-masing sesuai dengan satu sisi pada peta. Dengan demikian, ukuran kartu dibatasi oleh jumlah sirkuit seperti itu yang dapat ditampung pada FPGA - maksimum beberapa ribu.Teknologi para ilmuwan di Universitas Duke bekerja dengan memecah ruang kerja menjadi ribuan voxel. Algoritme kemudian menentukan apakah lintasan objek yang diprogram tertanam di salah satu voxels. Berkat FPGA, teknologi ini memeriksa ribuan rute secara bersamaan, dan kemudian menjahit jalur terpendek menggunakan opsi aman yang tersisa. Robot hanya bisa menjalankannya.Pada output, para ilmuwan menerima akselerasi yang signifikan: tidak peduli berapa banyak tepi pada kartu, kecepatan pemrosesan FPGA dari seluruh kartu adalah 50 nanodetik per piksel. Dalam satu contoh yang sangat kompleks, pemrosesan mengambil sedikit lebih dari 0,6 ms. Penjadwal, yang bekerja atas dasar prosesor Intel Xeon quad-core dengan frekuensi clock 3,5 gigahertz, diatasi dengan tugas ini dalam 2,738 ms. Prosesor konvensional mengkonsumsi sekitar 200-300 watt selama perencanaan pergerakan, dan pengembangan ilmuwan dari Duke University kurang dari 10 watt.Sekarang robot industri tidak menggunakan perencana gerak. Ketika datang ke, misalnya, perakitan jalur perakitan mobil menggunakan robot, lingkungan direncanakan sedemikian rupa sehingga robot dapat secara membabi buta mengulangi gerakan yang sama berulang-ulang. Mereka sama sekali tidak memiliki kesempatan untuk membuat kesalahan: bagian-bagian mobil setiap kali menemukan diri mereka di tempat yang sama, dan robot disimpan di dalam kotak khusus yang melampirkannya dari orang-orang. Tetapi jika robot menggunakan algoritma perencanaan gerakan waktu-nyata, itu tidak akan dapat dihalangi oleh orang-orang yang berkeliaran di masa lalu atau tidak berfungsinya sabuk konveyor - robot akan melakukan pekerjaan mereka dengan akurasi yang biasa.Perencanaan lalu lintas waktu nyata menghemat waktu dan biaya untuk rekayasa lingkungan lingkungan robot. Para ilmuwan telah mempelajari teknologi perencanaan selama 30 tahun terakhir, dan kemajuan terbaru telah memungkinkan untuk membuat rencana gerakan yang ditingkatkan dalam hitungan detik. Pendekatan yang ada, dengan beberapa pengecualian, bergantung pada kemampuan prosesor pusat atau lebih cepat, tetapi juga lebih banyak GPU yang mengkonsumsi energi. Menurut para ilmuwan, prosesor pusat pandai memecahkan berbagai jenis tugas, tetapi tidak dapat bersaing dengan prosesor yang dirancang khusus hanya untuk satu tugas tertentu.Dinesh Manocha, profesor di University of North Carolina di Chapel Hill, yang bekerja pada perencana gerakan waktu-nyata pada GPU, setuju bahwa FPGA memiliki potensi untuk meningkatkan efisiensi perencanaan gerak. Dia yakin bahwa pengembangan ilmuwan akan menemukan aplikasi praktisnya dalam waktu dekat: robot semakin banyak digunakan dalam kondisi baru yang tidak pasti, peran perencanaan lalu lintas hanya akan meningkat seiring waktu.Startup Realtime Robotics akan mengkomersialkan para ilmuwan teknologi. Sebagai bagian dari proyek ini, FPGA akan diganti dengan sirkuit terintegrasi khusus ( ASIC ), yang dapat menggabungkan lebih dari 100 ribu sisi. Pembaruan semacam itu akan memungkinkan robot bekerja di berbagai lingkungan yang luas.Source: https://habr.com/ru/post/id400079/
All Articles