Pembuatan dan pengujian motor tanpa sikat
Pada artikel ini, kami ingin berbicara tentang bagaimana kami menciptakan motor listrik dari awal: dari ide dan prototipe pertama hingga motor penuh yang lulus semua tes. Jika artikel ini tampaknya menarik bagi Anda, kami akan secara terpisah, lebih detail, memberi tahu Anda tentang tahapan paling menarik dari pekerjaan kami. Pada gambar dari kiri ke kanan: rotor, stator, rakitan motor parsial, rakitan motor
Pada gambar dari kiri ke kanan: rotor, stator, rakitan motor parsial, rakitan motorEntri
Motor listrik muncul lebih dari 150 tahun yang lalu, tetapi selama ini desain mereka tidak mengalami perubahan khusus: rotor berputar, gulungan stator tembaga, bantalan. Selama bertahun-tahun, hanya ada penurunan berat motor listrik, peningkatan efisiensi, dan juga akurasi kontrol kecepatan.Hari ini, berkat pengembangan elektronik modern dan kemunculan magnet yang kuat berdasarkan logam tanah jarang, dimungkinkan untuk membuat motor listrik yang kuat dan sekaligus kompak dan “ Brushless ” yang ringan . Pada saat yang sama, karena kesederhanaan desain mereka, mereka adalah yang paling dapat diandalkan di antara motor listrik yang pernah dibuat. Penciptaan motor seperti itu akan dibahas dalam artikel ini.Deskripsi motorik
Dalam "Brushless motor" tidak ada elemen "Brush", yang akrab bagi semua orang dalam membongkar alat listrik, yang perannya adalah untuk mentransfer arus ke belitan rotor yang berputar. Dalam motor brushless, arus disuplai ke belitan stator yang tidak bergerak, yang, menciptakan medan magnet secara bergantian di kutub masing-masing, memutar rotor di mana magnet dipasang.Motor tersebut pertama kali dicetak oleh kami sebagai printer 3D sebagai percobaan. Alih-alih piring khusus yang terbuat dari baja listrik, kami menggunakan plastik biasa untuk bodi rotor dan inti stator, tempat gulungan tembaga terluka. Magnet neodymium persegi panjang dipasang pada rotor. Secara alami, motor seperti itu tidak mampu menghasilkan daya maksimum. Namun, ini sudah cukup bagi motor untuk berputar hingga 20 k rpm, setelah itu plastik tidak tahan dan rotor motor terkoyak, dan magnet tersebar. Eksperimen ini mendorong kami untuk membuat motor yang lengkap.Beberapa prototipe pertama
Setelah mempelajari pendapat para pecinta model yang dikendalikan radio, sebagai tugas, kami memilih motor untuk mobil balap ukuran "540", sebagai yang paling populer. Motor ini memiliki dimensi panjang 54mm dan diameter 36mm. Kami membuatrotor motor baru dari magnet berbentuk silinder neodymium tunggal. Magnet epoksi direkatkan ke poros yang dikerjakan dari baja perkakas dalam produksi pilot. Kami memotong stator dengan laser dari satu set pelat baja transformator setebal 0,5 mm. Setiap piring kemudian dipernis dengan hati-hati dan kemudian stator yang sudah selesai dilem dari sekitar 50 piring. Pelat dipernis untuk menghindari sirkuit pendek di antara mereka dan untuk mengecualikan kehilangan energi pada arus Foucault yang dapat terjadi di stator.
stator dengan laser dari satu set pelat baja transformator setebal 0,5 mm. Setiap piring kemudian dipernis dengan hati-hati dan kemudian stator yang sudah selesai dilem dari sekitar 50 piring. Pelat dipernis untuk menghindari sirkuit pendek di antara mereka dan untuk mengecualikan kehilangan energi pada arus Foucault yang dapat terjadi di stator. Rumah motor terbuat dari dua bagian aluminium dalam bentuk wadah. Stator sangat cocok dengan rumah aluminium dan cocok dengan dinding. Desain ini memberikan pendinginan engine yang baik.
Rumah motor terbuat dari dua bagian aluminium dalam bentuk wadah. Stator sangat cocok dengan rumah aluminium dan cocok dengan dinding. Desain ini memberikan pendinginan engine yang baik.
Pengukuran kinerja
Untuk mencapai karakteristik maksimum perkembangannya, perlu dilakukan penilaian yang memadai dan pengukuran karakteristik yang akurat. Untuk melakukan ini, kami merancang dan mengumpulkan dinostend khusus.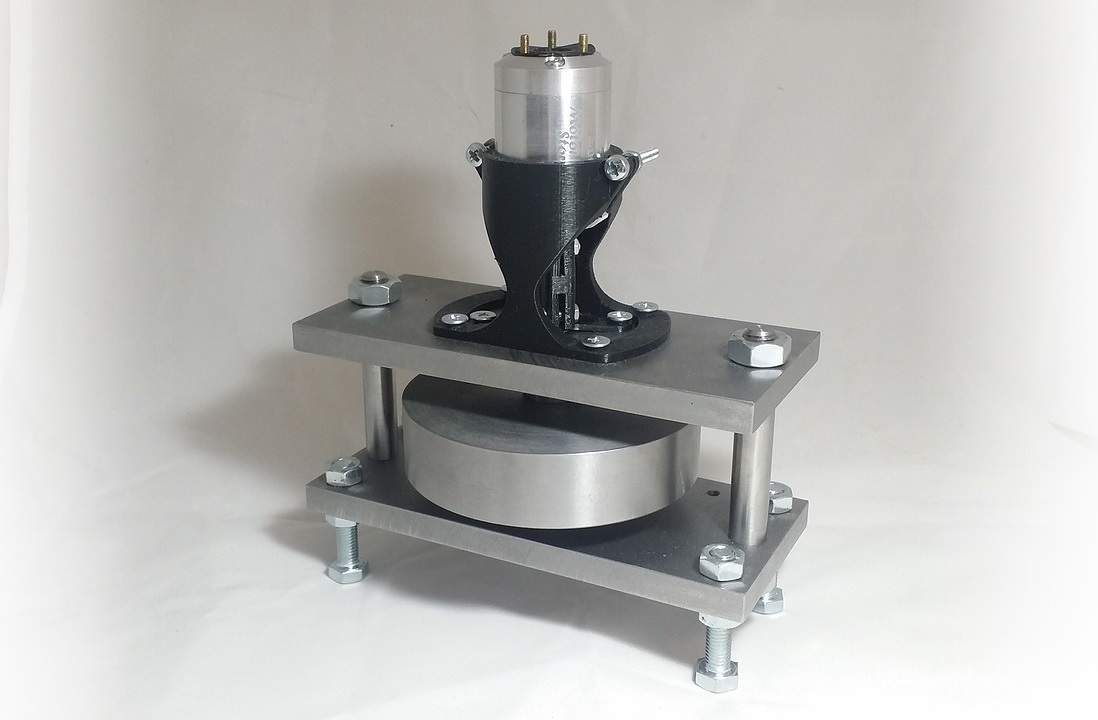 Elemen utama dudukan adalah beban berat dalam bentuk mesin cuci. Selama pengukuran, motor memutar beban yang diberikan dan daya output dan torsi motor dihitung dengan kecepatan dan percepatan sudut.Untuk mengukur kecepatan rotasi beban, sepasang magnet pada poros dan sensor digital magnetik A3144 berdasarkan efek hall digunakan. Tentu saja, dimungkinkan untuk mengukur putaran dengan impuls langsung dari belitan motor, karena motor ini sinkron. Namun, versi dengan sensor lebih dapat diandalkan dan akan bekerja bahkan pada kecepatan yang sangat rendah, di mana pulsa akan terbaca.Selain revolusi, stand kami dapat mengukur beberapa parameter yang lebih penting:
Elemen utama dudukan adalah beban berat dalam bentuk mesin cuci. Selama pengukuran, motor memutar beban yang diberikan dan daya output dan torsi motor dihitung dengan kecepatan dan percepatan sudut.Untuk mengukur kecepatan rotasi beban, sepasang magnet pada poros dan sensor digital magnetik A3144 berdasarkan efek hall digunakan. Tentu saja, dimungkinkan untuk mengukur putaran dengan impuls langsung dari belitan motor, karena motor ini sinkron. Namun, versi dengan sensor lebih dapat diandalkan dan akan bekerja bahkan pada kecepatan yang sangat rendah, di mana pulsa akan terbaca.Selain revolusi, stand kami dapat mengukur beberapa parameter yang lebih penting:- arus suplai (hingga 30A) menggunakan sensor arus berdasarkan pada efek hall ACS712;
- tegangan suplai. Diukur langsung melalui ADC mikrokontroler, melalui pembagi tegangan;
- suhu di dalam / di luar motor. Suhu diukur dengan hambatan termal semikonduktor;
Untuk mengumpulkan semua parameter dari sensor dan mentransfernya ke komputer, mikrokontroler seri mega AVR digunakan pada papan Arduino nano. Mikrokontroler berkomunikasi dengan komputer melalui port COM. Untuk memproses pembacaan, sebuah program khusus ditulis, mencatat, rata-rata dan menunjukkan hasil pengukuran.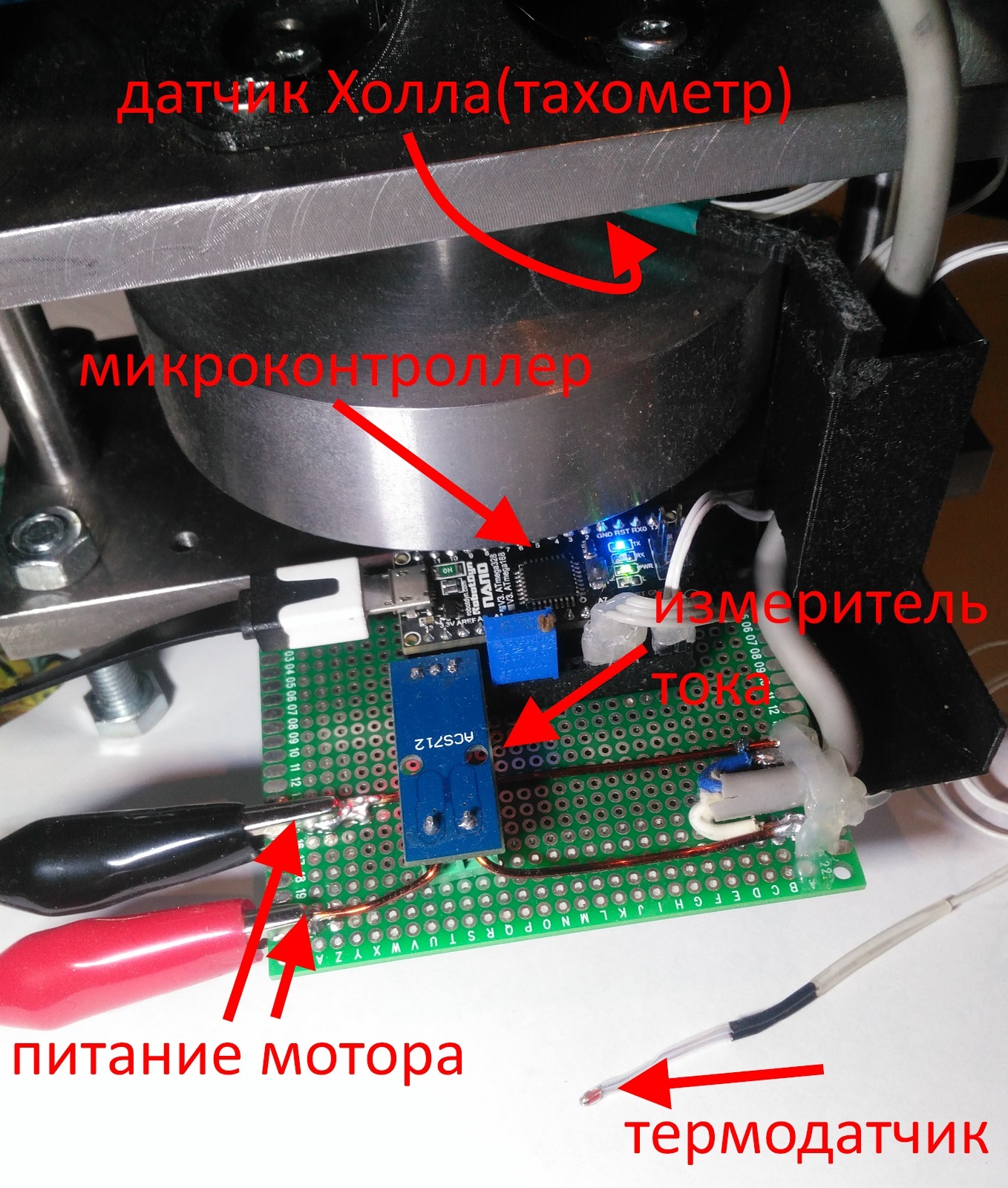 Hasilnya, stand kami dapat mengukur karakteristik motor berikut kapan saja:
Hasilnya, stand kami dapat mengukur karakteristik motor berikut kapan saja:- konsumsi saat ini;
- konsumsi daya;
- konsumsi daya;
- daya output;
- revolusi poros;
- saat di poros;
- Efisiensi
- daya akan memanas;
- suhu di dalam motor.
Video yang menunjukkan hasil kerja stan:Hasil tes
Untuk menguji kinerja dudukan, pertama-tama kami mengujinya pada motor komutator R540-6022 konvensional. Ada beberapa parameter yang diketahui untuk motor ini, tetapi ini cukup untuk mengevaluasi hasil pengukuran, yang ternyata cukup dekat dengan yang ada di pabrik.Kemudian motor kami sudah diuji. Secara alami, ia mampu menunjukkan efisiensi yang lebih baik (65% berbanding 45%) dan pada saat yang sama memiliki momen yang lebih besar (1200 berbanding 250 g per cm) daripada motor biasa. Pengukuran suhu juga memberikan hasil yang cukup baik, selama pengujian motor tidak memanas di atas 80 derajat.Tetapi saat ini pengukurannya belum final. Kami tidak dapat mengukur motor dalam kisaran kecepatan penuh karena daya sumber daya yang terbatas. Kami juga harus membandingkan motor kami dengan motor pesaing yang sama dan mengujinya "dalam pertempuran", menaruhnya di mobil yang dikendalikan radio dan berbicara di kompetisi. Source: https://habr.com/ru/post/id400337/
All Articles