 Lebih dari sebulan telah berlalu sejak organisasi nirlaba OpenAI Ilona Mask memperkenalkan middleware Universe untuk pelatihan dan pengajaran AI yang kuat. Secara teori, pelatihan dapat dilakukan pada semua informasi umat manusia, dapat diakses melalui Internet. Menggunakan platform perangkat lunak Universe, agen cerdas menggunakan komputer dengan cara yang persis sama dengan yang dilakukan orang: ia akan melihat piksel layar komputer dan berinteraksi menggunakan keyboard dan mouse virtual.Sekarang, ke lusinan permainan yang tersedia untuk pelatihan AI, permainan Grand Theft Auto V telah ditambahkan , yang dibedakan dengan realisme yang luar biasa.Anda dapat membuat agen AI kendaraan tak berawak pada kerangka pembelajaran mesin apa pun dan relatif mudah untuk terhubung ke game di komputer dengan GTA V yang diinstal.
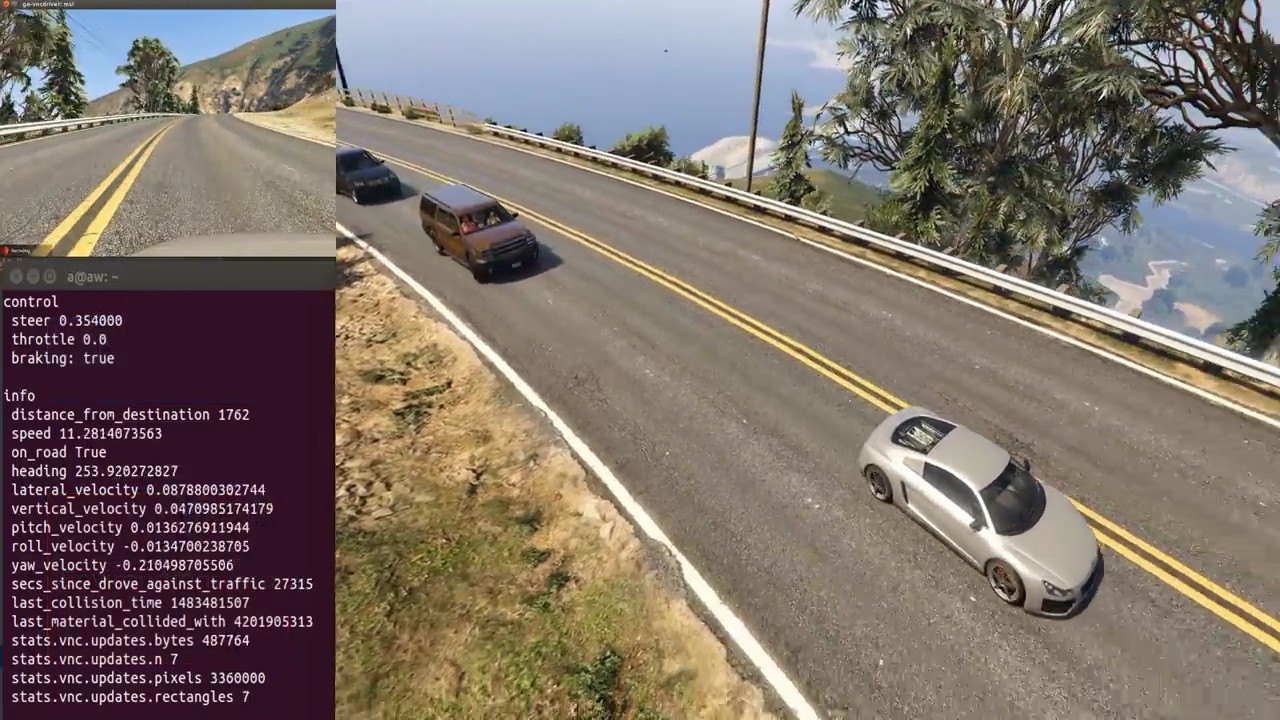
Lebih dari sebulan telah berlalu sejak organisasi nirlaba OpenAI Ilona Mask memperkenalkan middleware Universe untuk pelatihan dan pengajaran AI yang kuat. Secara teori, pelatihan dapat dilakukan pada semua informasi umat manusia, dapat diakses melalui Internet. Menggunakan platform perangkat lunak Universe, agen cerdas menggunakan komputer dengan cara yang persis sama dengan yang dilakukan orang: ia akan melihat piksel layar komputer dan berinteraksi menggunakan keyboard dan mouse virtual.Sekarang, ke lusinan permainan yang tersedia untuk pelatihan AI, permainan Grand Theft Auto V telah ditambahkan , yang dibedakan dengan realisme yang luar biasa.Anda dapat membuat agen AI kendaraan tak berawak pada kerangka pembelajaran mesin apa pun dan relatif mudah untuk terhubung ke game di komputer dengan GTA V yang diinstal.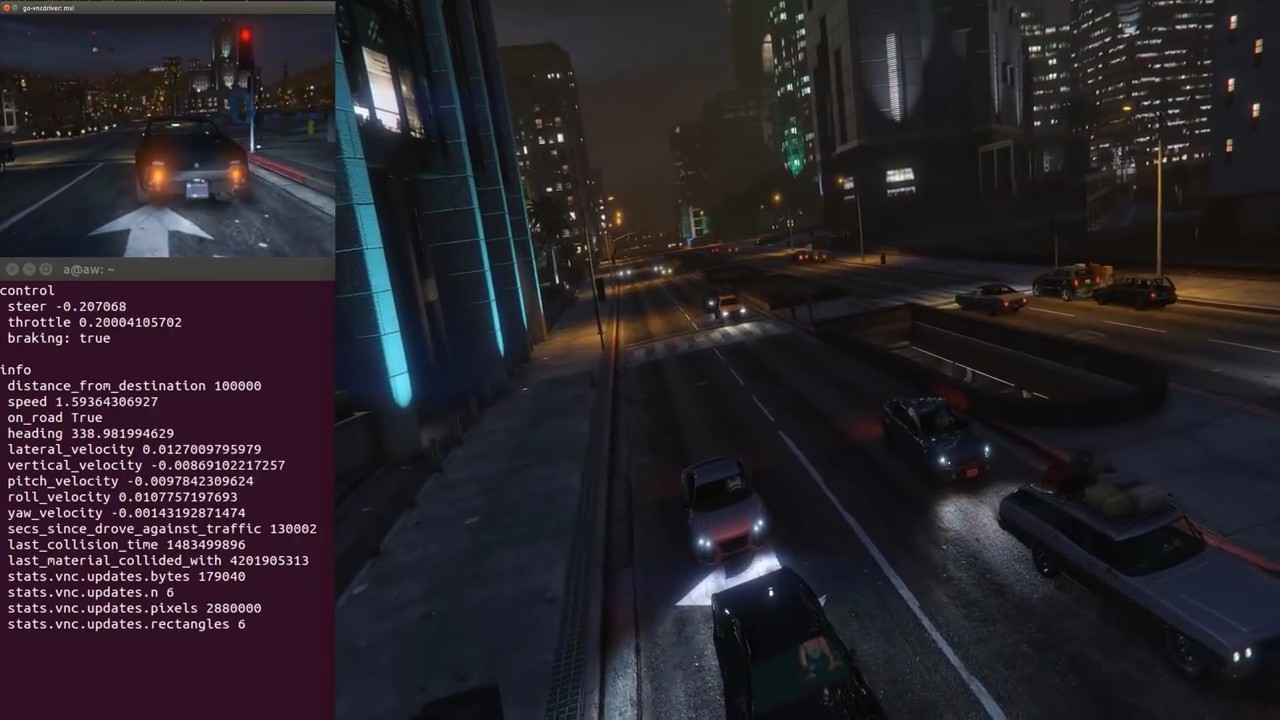 Agen AI berada di persimpangan jalan. Dalam diagnosa konsol, status menekan pedal rem (benar) dan parameter autopilot lainnya saat ini ditampilkan di sebelah kiri.Game GTA V, bahkan dengan kekerasan yang dinonaktifkan, memberikan peluang yang kaya untuk melatih AI untuk kendaraan tak berawak. Ini adalah salah satu dunia terbuka terbesar dan terkaya. Aksi permainan berlangsung di wilayah Pulau San Andreas dengan luas hampir 20% dari Los Angeles ini. Di sini Anda dapat menjalankan berbagai skenario untuk menguji AI. Agen memiliki akses ke 257 jenis mobil yang berbeda, 7 jenis sepeda, 14 jenis cuaca, dan lingkungan dapat diubah tepat selama simulasi.
Agen AI berada di persimpangan jalan. Dalam diagnosa konsol, status menekan pedal rem (benar) dan parameter autopilot lainnya saat ini ditampilkan di sebelah kiri.Game GTA V, bahkan dengan kekerasan yang dinonaktifkan, memberikan peluang yang kaya untuk melatih AI untuk kendaraan tak berawak. Ini adalah salah satu dunia terbuka terbesar dan terkaya. Aksi permainan berlangsung di wilayah Pulau San Andreas dengan luas hampir 20% dari Los Angeles ini. Di sini Anda dapat menjalankan berbagai skenario untuk menguji AI. Agen memiliki akses ke 257 jenis mobil yang berbeda, 7 jenis sepeda, 14 jenis cuaca, dan lingkungan dapat diubah tepat selama simulasi. Pulau San AndreasBerkat banyak mod , GTA V dapat memuat bangunan dari kota-kota nyata, mobil nyata, rambu jalan nyata, dan objek lainnya. Karenanya, agen AI Anda akan dilatih mengemudi dalam kondisi jalan nyata.
Pulau San AndreasBerkat banyak mod , GTA V dapat memuat bangunan dari kota-kota nyata, mobil nyata, rambu jalan nyata, dan objek lainnya. Karenanya, agen AI Anda akan dilatih mengemudi dalam kondisi jalan nyata.Platform Universe
Pembukaan platform universal universal Universe adalah kelanjutan dari tindakan yang direncanakan OpenAI untuk menciptakan AI universal terbuka di seluruh dunia. Pada bulan April tahun ini, organisasi ini merilis versi beta publik dari perangkat OpenAI Gym untuk mengembangkan dan membandingkan algoritma pembelajaran penguatan. OpenAI Gym "gym" terdiri dari sejumlah besar lingkungan (dari simulator robot humanoid hingga game Atari ). Ada situs untuk membandingkan dan mereproduksi hasil .OpenAI percaya penguatan pembelajaran adalah cara penting pembelajaran mesin yang akan sangat meningkatkan AI. Dalam proses pembelajaran dengan metode ini, sistem uji (agen) belajar dengan berinteraksi dengan lingkungan tertentu. Tidak seperti pengajaran tradisional dengan guru, respons terhadap keputusan AI yang dibuat adalah sinyal penguatan, sementara beberapa aturan penguatan dibentuk secara dinamis dan sulit dipahami, yaitu, berdasarkan aktivitas simultan neuron formal.Menjalankan agen AI di komputer Anda dengan GTA V
Integrasi Universe dengan Grand Theft Auto V telah dibuat dan didukung oleh proyek DeepDrive , yang kini telah beralih ke open source. Proyek ini memberikan kemampuan untuk menjalankan agen Universe di komputer Anda sendiri dengan salinan permainan yang diinstal.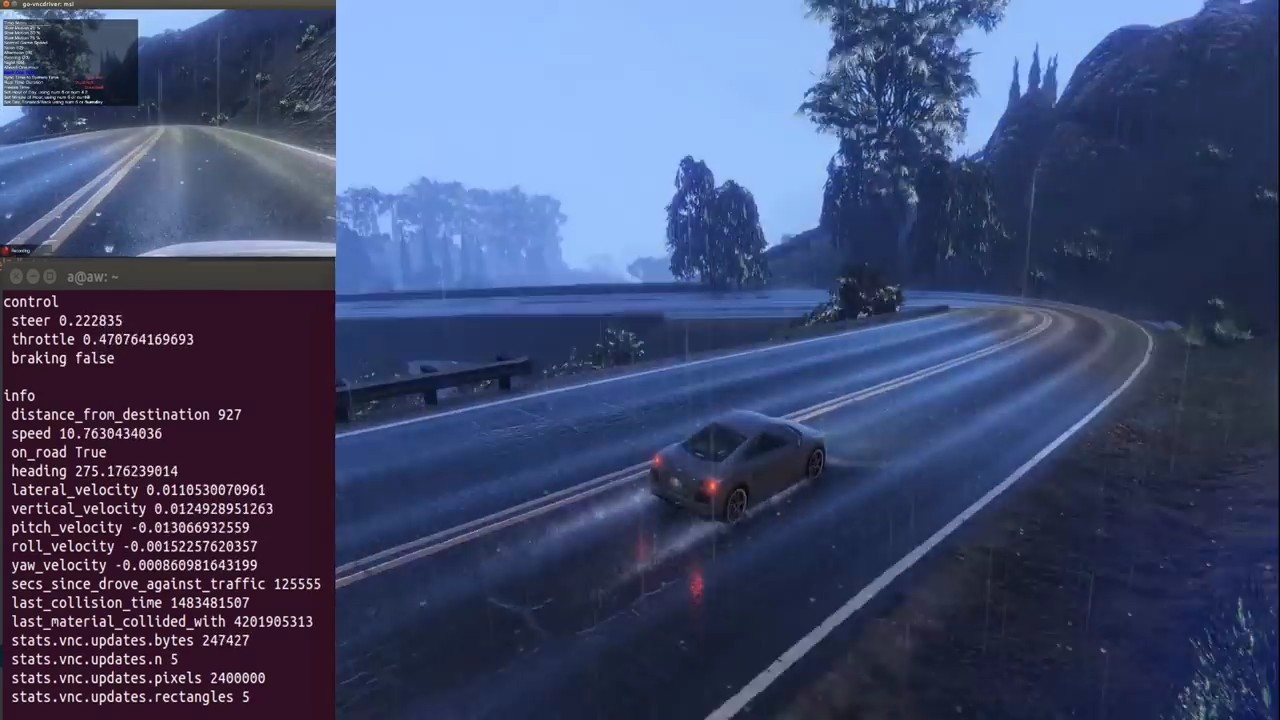 Melalui Universe, agen kecerdasan buatan mendapatkan akses ke dunia game tiga dimensi realistis GTA V. Video berikutnya menunjukkan bingkai dari game yang ditransfer ke agen AI untuk diproses (secara artifisial melambat menjadi 8 FPS, kiri atas), informasi diagnostik dari agen dan lingkungan (kiri bawah) , serta tampilan yang ramah manusia dari kamera (kanan).Integrasi AI ke dalam game melarang tindakan kekerasan di GTA V.Untuk di mulai komputernya agen yang bekerja diperlukan untuk menjalankan proses server GTA V . Anda harus terlebih dahulu menginstal semesta pustaka python , dan kemudian menghubungkan agen menggunakan kode berikut.
Melalui Universe, agen kecerdasan buatan mendapatkan akses ke dunia game tiga dimensi realistis GTA V. Video berikutnya menunjukkan bingkai dari game yang ditransfer ke agen AI untuk diproses (secara artifisial melambat menjadi 8 FPS, kiri atas), informasi diagnostik dari agen dan lingkungan (kiri bawah) , serta tampilan yang ramah manusia dari kamera (kanan).Integrasi AI ke dalam game melarang tindakan kekerasan di GTA V.Untuk di mulai komputernya agen yang bekerja diperlukan untuk menjalankan proses server GTA V . Anda harus terlebih dahulu menginstal semesta pustaka python , dan kemudian menghubungkan agen menggunakan kode berikut.import gym
import universe
from universe.spaces import joystick_event
env = gym.make('gtav.SaneDriving-v0')
env.configure(remotes='vnc://$host:$port')
observation_n = env.reset()
while True:
steer = joystick_event.JoystickAxisXEvent(-1)
throttle = joystick_event.JoystickAxisZEvent(-1)
action_n = [[steer, throttle] for _ in observation_n]
observation_n, reward_n, done_n, info = env.step(action_n)
env.render()
Seperti biasa untuk agen Universe, AI menggunakan keyboard virtual, tetapi dalam hal ini, joystick virtual juga tersedia untuk itu. AI menunjukkan hasil terbaik dengan joystick.Drive yang dalam
DeepDrive adalah platform pengembangan AI khusus untuk kendaraan tak berawak open source. Ini menggunakan kerangka modding dan teknik khusus untuk mengubah GTA V menjadi simulator mobil normal. Agen pra-terlatih dengan kemampuan manajemen transportasi dan set data yang mereka latih tersedia.Meskipun platform DeepDrive muncul lebih awal dari Semesta, tetapi sekarang pengembangnya memutuskan bahwa akan lebih bijaksana untuk mentransfer pekerjaannya ke platform terbuka universal ini. Itu langkah yang tepat. Sebelumnya, untuk menjalankan agen, komputer Windows dan beberapa jam pengaturan lingkungan diperlukan ( intersepsi DirectX digunakan di sanauntuk menangkap layar, dan untuk menulis agen, Anda harus menggunakan antarmuka C ++ untuk Caffe di Windows). Sekarang DeepDrive menginstal dalam 20 menit, berjalan di Linux dan OS X, dan agen dapat ditulis pada kerangka pembelajaran mesin apa pun. Kode sumber yangditerbitkan sumber terbuka dan AMI untuk GTA V, driver-driver pra-terlatih . Pelatihannya berlangsung 21 jam (600 ribu gambar). Agen memiliki keterampilan mengemudi dasar dan merupakan awal yang baik untuk eksperimen Anda sendiri.Bersama-sama, ribuan agen AI dapat membuat pengemudi yang benar-benar canggih - sebuah program yang dapat menggerakkan kendaraan tanpa awak yang nyata di dunia nyata.