Untuk beberapa alasan, beberapa orang di Rusia tahu tentang situasi sebenarnya dengan menggunakan berbagai robot di lokasi darurat PLTN Fukushima. Masyarakat umum memiliki stereotip yang jelas:

Bahkan, dalam berbagai karya selama likuidasi konsekuensi dari kecelakaan di PLTN Fukushima (saya mungkin akan menulis lebih banyak demi FAE), ratusan unit berbagai robot yang dikendalikan dari jarak jauh digunakan dan sedang digunakan. Skala penggunaan mobil yang dikendalikan dari jarak jauh jauh lebih besar daripada di pembangkit listrik tenaga nuklir Chernobyl, karena alasan sederhana bahwa semua peralatan ini telah berkembang pesat selama 30 tahun terakhir dan karena kecelakaan di pembangkit listrik tenaga nuklir Chernobyl lebih luas daripada di pembangkit listrik tenaga nuklir Chernobyl.
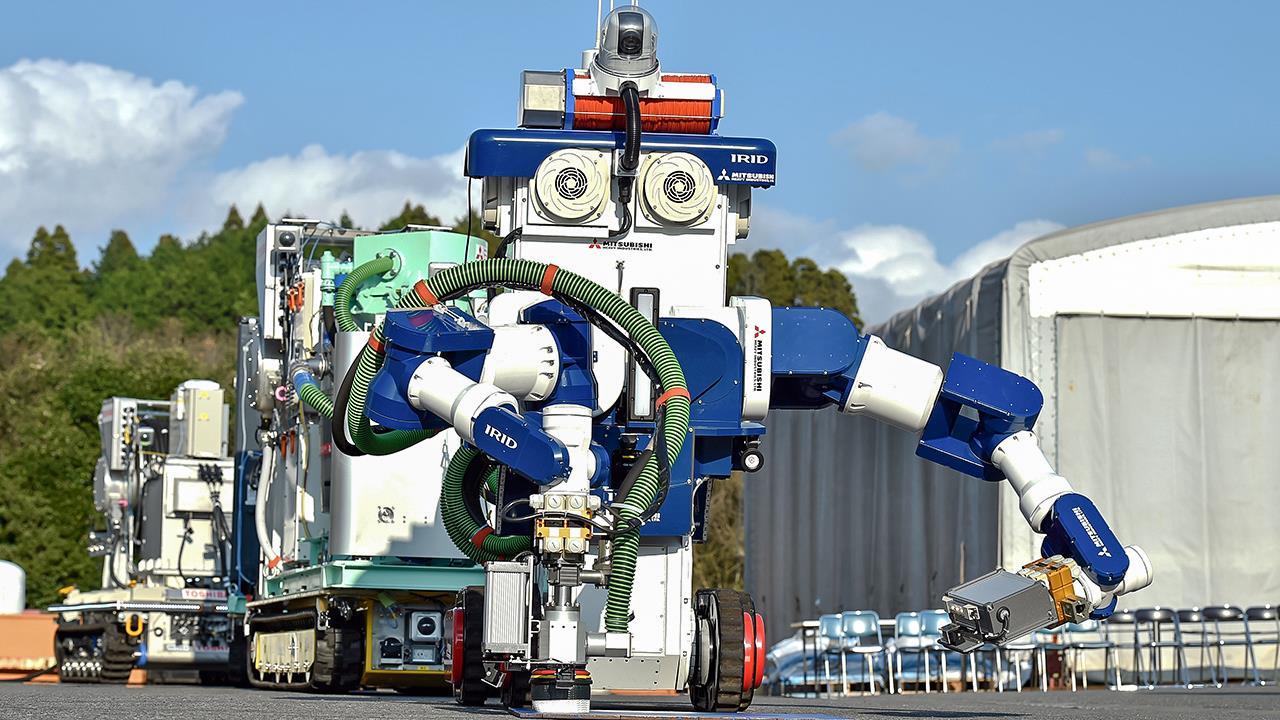 Penyedot debu robot, versi Jepang untuk Fukushima.
Penyedot debu robot, versi Jepang untuk Fukushima.Sebelum melihat robot, ada baiknya setidaknya secara umum untuk membayangkan bahwa pekerjaan itu dilakukan di FAES selama 6 tahun terakhir sejak kecelakaan itu.
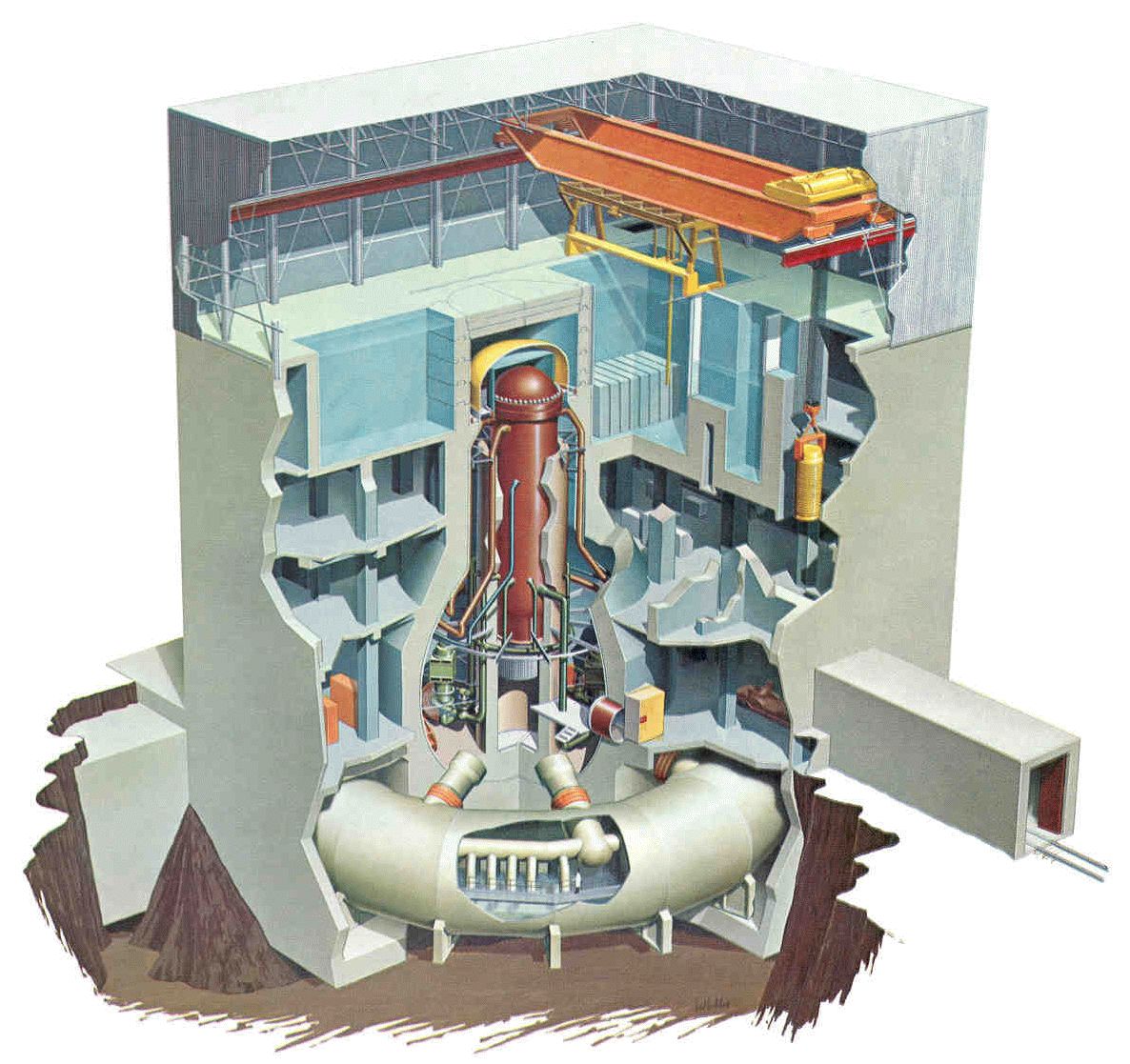 Gambar yang disederhanakan ini memberikan gambaran umum tentang desain blok-blok PLTN Fukushima: reaktor di sini di tengah (coklat) terletak di tengah wadah beton berbentuk buah pir, di dalamnya terdapat banyak peralatan. Di kanan atas reaktor ada kolam penampung, tepat di bawah reaktor ada ruang untuk aktuator batang kendali dan pelindung (tidak seperti PWR, mereka dimasukkan ke dalam AZ dari bawah di BWR ). Di bawah dan di sekitar reaktor terdapat kolam bubbler toroidal yang dirancang untuk mengembun uap jika terjadi pecahnya bejana reaktor utama.
Gambar yang disederhanakan ini memberikan gambaran umum tentang desain blok-blok PLTN Fukushima: reaktor di sini di tengah (coklat) terletak di tengah wadah beton berbentuk buah pir, di dalamnya terdapat banyak peralatan. Di kanan atas reaktor ada kolam penampung, tepat di bawah reaktor ada ruang untuk aktuator batang kendali dan pelindung (tidak seperti PWR, mereka dimasukkan ke dalam AZ dari bawah di BWR ). Di bawah dan di sekitar reaktor terdapat kolam bubbler toroidal yang dirancang untuk mengembun uap jika terjadi pecahnya bejana reaktor utama.Setelah membawa reaktor blok 1,2,3 ke keadaan "penghentian dingin" (yaitu, mendinginkan bahan bakar yang dihabiskan dalam reaktor hingga 100 C dan di bawah) pada akhir 11 tahun, tugas-tugas berikut
dirumuskan :
- Pengintaian situasi radiasi di tempat-tempat yang sulit dijangkau - kapal reaktor, wadah, torre bubbler, dan lainnya, di mana pada akhir 2011 situasinya belum diketahui (terutama dengan sisa-sisa bahan bakar cair)
- Mengurangi angin dan aliran air radioaktivitas dari reaktor - dengan menghilangkan kebocoran (termasuk dinding es yang terkenal), membuat panel bagian dinding bangunan, mengumpulkan sampah yang terkontaminasi dalam wadah di mana hal ini belum dilakukan
- Persiapan lokasi untuk pembongkaran SNF dari kolam penyimpanan semua 4 blok - pembersihan bangunan yang hancur, pemetaan puing-puing di kolam penyimpanan dan pembersihannya, pengaturan struktur sementara di atas kolam, dan akhirnya - SNF membongkar ke dalam wadah
- Dekontaminasi maksimum fasilitas (yaitu pembersihan kontaminan permukaan. Hal ini diperlukan terutama untuk kepentingan pekerjaan penghilangan SNF - untuk mengurangi tingkat dosis personel yang akan melaksanakan pekerjaan ini.
- Sealing wadah reaktor dan selanjutnya memompa air radioaktif dari gedung unit daya
- Membongkar residu bahan bakar yang sangat radioaktif (corium) dalam 1,2,3 blok
- Setelah pembebasan blok dari benda berbahaya nuklir dan radiasi - pembongkaran dan pengaturan "area hijau"
 Infografis per blok pada awal 2016.
Infografis per blok pada awal 2016.Seluruh rencana seharusnya dilaksanakan dalam 30-40 tahun, dan yang paling sulit di sini adalah pembongkaran bahan bakar nuklir bekas dari kolam penyimpanan yang dipenuhi puing-puing dan penghapusan corium dari sisa-sisa kapal reaktor. Pada saat ini, SNF benar-benar dibongkar dari blok 4 (di mana, untungnya, itu tidak di reaktor, tetapi hanya di kolam penampung - yaitu, blok 4 dapat segera berubah menjadi halaman hijau), dan pembangunan cangkang pelindung untuk tujuan bongkar SNF dari blok 3, direncanakan akan dimulai pada 2017.
Dengan blok 1,2, situasinya adalah yang paling sulit - di sini untuk pembangunan tempat penampungan untuk pembersihan SNF, pertama-tama perlu untuk membongkar puing-puing dan sebagian mendekontaminasi untuk mengurangi ladang, yang sekarang dilakukan oleh TEPCO (pemilik pembangkit listrik tenaga nuklir).
 Pandangan umum dari situs PLTN Fukushima pada tahun 2016. Ngomong-ngomong, ada rencana bagus untuk menjelaskan semua tank ini dan beberapa bangunan.
Pandangan umum dari situs PLTN Fukushima pada tahun 2016. Ngomong-ngomong, ada rencana bagus untuk menjelaskan semua tank ini dan beberapa bangunan.Jadi, robot berpartisipasi sepenuhnya dalam semua pekerjaan yang dijelaskan di atas. Ya, tentu saja, ini semua adalah mesin telecontrolled, terutama yang kabel, saya tidak akan menyelidiki debat terminologis di sini, menganggap peralatan seperti itu menjadi robot, atau hanya otonom, dan saya akan menyebutnya robot.
 iRobot Packbot 510 adalah yang pertama dari yang digunakan di FAES.
iRobot Packbot 510 adalah yang pertama dari yang digunakan di FAES.Dari hari-hari pertama kecelakaan, masih pada bagian aktifnya, muncul pertanyaan tentang kecerdasan radiasi. TEPCO memiliki beberapa armada robot iRobot Packbot - mesin skala besar, cukup nyaman untuk tujuan tersebut. Mereka meletakkan dosimeter pada pakbots (sepertinya ini umumnya salah satu opsi standar), kamera gamma, tekanan, suhu, sensor kelembaban, dan mengirimnya ke dan di sekitar blok yang hancur oleh ledakan. Sayangnya, semuanya buruk dengan pakbots saat bergerak di sekitar tangga, dan mereka melakukan pengintaian di lantai dasar dan di luar blok.
Pelatihan April di situs FNPP dengan robot prajurit iRobot.Setelah beberapa waktu, mereka menambahkan beberapa robot (dari desain serupa) yang dikembangkan oleh pusat FuRO dan Universitas Chiba - Quince, Hibiscus, Sakura, dll., Menurut pengembang yang memiliki kecerdasan / mekanik terbaik ketika bergerak di sekitar medan yang sulit. Memang, robot-robot ini sudah pada April-Mei 2011 diizinkan untuk mencari lantai atas blok, dua di antaranya hilang karena kabel putus.
Quince on reconnaissance di dalam unit kedua PLTN Fukushima, April-Juli 2011.Selain itu, setidaknya satu pesawat tak berawak Honeywell T-HAWK yang disediakan oleh militer Jepang digunakan untuk pengintaian dan pengawasan udara. Militer dan beberapa robot perayap seperti Talon lainnya juga murah hati. Ini adalah versi yang lebih berat dan lebih aman dalam ideologi Packbot.

Selain pengintaian, hampir segera, pada minggu-minggu pertama, untuk menghilangkan puing-puing, penggunaan peralatan konstruksi telecontrolled dimulai - beberapa excavator, buldoser, truk, yang berhasil membersihkan lorong-lorong di antara blok-blok dari puing radioaktif.
 Robot yang digunakan untuk membersihkan limbah radioaktif di blok 3 pada Mei-Juni 2011. Termasuk dua tradisional untuk industri nuklir Brokk'a
Robot yang digunakan untuk membersihkan limbah radioaktif di blok 3 pada Mei-Juni 2011. Termasuk dua tradisional untuk industri nuklir Brokk'aSebuah aplikasi menarik ditemukan untuk pompa beton robot Putzmeister - menuangkan air dari atas blok dan mengamati situasi dari ledakan 70 meter. Manajemen mesin seperti itu dilakukan melalui udara dari ruang bergerak yang dilindungi timbal, yang dipasang di dekat tempat kerja.
 Putzmeister yang dikendalikan dari jarak jauh dengan ledakan 62 meter, awal April 2011, tugasnya adalah pengintaian dan pasokan air ke bagian atas blok yang hancur.
Putzmeister yang dikendalikan dari jarak jauh dengan ledakan 62 meter, awal April 2011, tugasnya adalah pengintaian dan pasokan air ke bagian atas blok yang hancur.Saya pikir bahwa penampilan instan peralatan seperti itu di situs FNPP adalah karena fakta bahwa selama 10 tahun terakhir ini telah menjadi populer untuk menambahkan kemungkinan kontrol eksternal dari kendali jarak jauh ke mesin konstruksi, mis. dasarnya kontrol elektronik sepenuhnya di dalam, yang sudah mudah dibawa ke setidaknya belahan bumi lain. Memiliki teknik seperti itu, cukup untuk menggantungnya dengan kamera dan melengkapi dengan saluran telekomunikasi yang benar, dan robot yang dikendalikan dari jarak jauh siap. Sayangnya, pada tahun 1986, untuk mencapai hasil seperti itu, perlu untuk menyiksa diri kita sendiri, dan sebenarnya masalahnya tidak terpecahkan - kecepatan dalam menghilangkan konsekuensi kecelakaan ternyata lebih penting daripada dosis dosis orang.

Akhirnya, sejak 2011, teknologi jarak jauh tahan radiasi, standar untuk industri nuklir, juga telah digunakan di situs FAES: robot BROKK dan manipulator gerobak mobil Walischmiller yang berat (lebih dari satu ton!) - pada dasarnya lagi pada pembongkaran limbah radioaktif, bekerja di bagian terpanas poin.
Anehnya, semua peralatan ini tidak memiliki masalah khusus yang terkait dengan radiasi - baik, atau entah bagaimana diam (yang diragukan). Namun, robotik tanpa kondom digunakan di medan rendah (tidak lebih tinggi dari 15 x-ray per jam), dan untuk kondisi yang lebih parah, kadang-kadang ditempatkan pelindung pada perangkat elektronik (misalnya, 3 pompa beton remote control Putzmeister, yang berdiri dekat dengan blok yang hancur oleh ledakan dan menuangkan air dari atas)
 Situasi radiasi pada 23/3/2011 - seminggu setelah akhir fase aktif kecelakaan. Angka terbesar 130 mSv adalah 13 R / jam, bandingkan dengan ~ 1000 R / jam di situs Chernobyl pada 6 Mei.
Situasi radiasi pada 23/3/2011 - seminggu setelah akhir fase aktif kecelakaan. Angka terbesar 130 mSv adalah 13 R / jam, bandingkan dengan ~ 1000 R / jam di situs Chernobyl pada 6 Mei.Namun, satu poin penting harus diperhatikan di sini. Peralatan serial atau semi-serial tidak dikirim ke bejana reaktor atau ke dasar wadah, di mana ladang hingga 50.000 r / jam kemudian diukur. Untuk tugas-tugas seperti itu, dan yang spesifik lainnya, seperti dekontaminasi volume besar, pengintaian di bawah air, penghapusan puing-puing dari kolam penyimpanan bahan bakar bekas, perusahaan-perusahaan Jepang sejak 2011 memimpin pengembangan berbagai mekanisme, banyak di antaranya ditugaskan hanya hari ini. Mari kita lihat mereka:
 Pelari survei dan FRIGO-MA
Pelari survei dan FRIGO-MAMari kita mulai dengan kinematika Pakbot versi yang lebih ringkas - pelari Survei TOPY. Namun, bukan robot yang sangat menarik, merangkak ke lantai paling bawah blok pada tahun 2012. Versi yang lebih kecil dari skema ini yang disebut FRIGO-MA, serta robot berkaki empat aneh dari Toshiba yang dapat menghasilkan pengintaian datar terpisah, digunakan untuk mengontrol kebocoran dari perpipaan pipa reaktor (untuk sementara waktu tugas menemukan tempat kebocoran air pendingin sangat penting bagi likuidator).
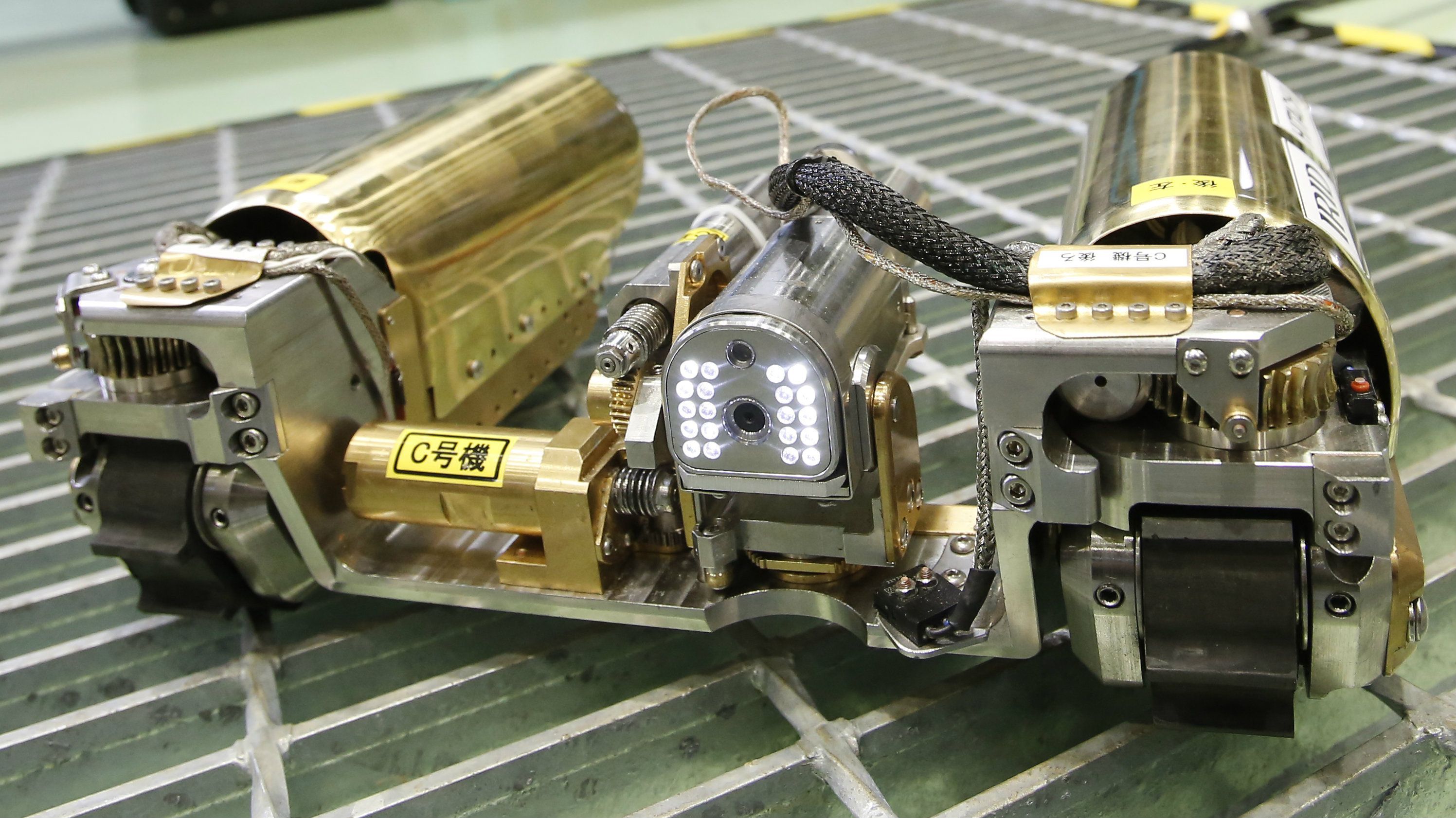
Scorpion, scout yang lebih kecil dan lebih kuat, dikembangkan Toshiba - dan robot ini berjalan ke dalam gelembung dan reaktor kontainer (dan tampaknya salah satu kalajengking menjadi robot pertama yang direplikasi oleh media).
Menguji "Scorpion" pada tata letak blok konten 2. Sangat menarik bahwa banyak berbagai model dibangun untuk mengirim robot, yang cukup andal mereproduksi banyak elemen desain pembangkit listrik tenaga nuklir.By the way, untuk pertanyaan pengintai kecil. Saya menyukai foto robot ini - tebak apa yang digunakan sebagai kamera

Saingan Toshiba Scorpion adalah Shape-changer milik Hitachi, desain yang cukup memukau dengan kinematika yang menarik. Dua robot versi ini dikirim ke bagian bawah wadah, dilakukan pengintaian di ladang ~ 500 r / jam (5 Sv / jam), dan ditemukan ada semprotan corium.

Merekalah yang menjadi pahlawan berita tahun lalu “TEPCO mengirim robot ke reaktor, dan mereka mati karena radiasi” - pada kenyataannya, robot pertama baru saja terjebak, tetapi robot kedua benar-benar menemukan sepotong SNF dengan bidang 5000-8000 r / jam dan elektronik menolak (Ironi nasib di sini adalah bahwa istilah "tetap sadar" dalam mobil ternyata sangat mirip dengan seseorang). Ngomong-ngomong, meskipun sudah mati, robot-robot ini telah menemukan hal yang agak penting - dalam wadah kontainer unit 1, air berada pada level yang cukup tinggi, yang artinya ketat.
Video difilmkan oleh salah satu pengintai ini.Namun, tidak seperti seseorang, insinyur memiliki kesempatan, dihadapkan dengan masalah, mencoba menyelesaikannya dengan menciptakan opsi baru. Sekarang Toshiba sedang menguji versi scout Scorpio kecil yang sama, dilengkapi dengan microbranch dan pisau mikro untuk mendorong potongan corium. Secara umum, mobil baru semakin dekat dan dekat ke area utama yang belum dijelajahi - tempat-tempat penetrasi bejana reaktor dan corium kontainer, dan memetakan lokasi corium di bawah reaktor di blok 1,2,3.
Saat ini, dari metode non-jauh, TEPCO hanya berhasil menurunkan kamera tahan radiasi di blok No. 2 ke corium dan mengukur DER pada 530 Sv / jam (mis. 53000 r / jam). Tingkat dosis seperti itu tidak memungkinkan kita untuk berharap bahwa tugas pengintaian / pemetaan akan sederhana - elektronik yang ada, bahkan tahan radiasi menjadi terlalu tidak dapat diandalkan dalam kondisi seperti itu, dan tidak mungkin untuk melindunginya dalam robot kecil.
Ngomong-ngomong, dalam kerangka ITER, garis sirkuit mikro tahan radiasi (ADC, DAC, antarmuka digital, logika) sedang dikembangkan di Eropa untuk kondisi kerja yang kira-kira demikian. Contoh lain tentang bagaimana proyek “tidak berharga” membawa hasil nyata.
Menyelesaikan topik pengintaian, harus disebutkan bahwa TEPCO menggunakan beberapa robot bawah air otonom seri dan satu perahu kecil yang dikendalikan dari jarak jauh untuk pengintaian dari basement yang dipenuhi air.
Tugas utama kedua untuk pasukan robot TEPCO adalah dan adalah analisis penyumbatan, terutama dalam rangka penghapusan SNF. Seperti yang saya tulis di atas, pada mulanya FAEC menggunakan produk standar BROKK dan Walischmiller untuk industri nuklir dan peralatan konstruksi yang dikendalikan secara telecontrolled. Namun, Hitachi dengan cepat mengembangkan robot khusus yang dilacak seperti BROKK (mis. Robot berat dengan tenaga otonom dari mesin pembakaran internal) robot ASTACO-SoRa.
Dengan kedok ASTACO-SoRa, ada sesuatu dari gambar anime Jepang.Tugasnya adalah membongkar puing-puing kabel - sebuah objek kompleks untuk pembongkaran senjata robot standar, yang sering ditemukan di pembangkit listrik tenaga nuklir. Seiring dengan ASTACO-SoRa khusus dan BROKK tahan radiasi, robot pembongkaran Husqvarna DXR-140, DX-250 dan DX-310 digunakan. Bagaimana, Anda tidak tahu bahwa husqvarna menghasilkan perusak?
 Penerimaan Husqvarn pada tahun 2012 di pembangkit listrik tenaga nuklir Fukushima.
Penerimaan Husqvarn pada tahun 2012 di pembangkit listrik tenaga nuklir Fukushima.Mengapa Anda membutuhkan perangkat seperti itu? Biarkan saya mengingatkan Anda bahwa dalam rangka acara utama untuk hari ini, yaitu, ekstraksi bahan bakar nuklir bekas dari kolam penyimpanan, perlu untuk membongkar puing-puing di sekitar kolam, membangun tempat penampungan, dan umumnya mempersiapkan. Dan tidak di mana-mana lingkungan radiasi memungkinkan orang untuk melakukan hal ini, sehingga pergeseran tugas-tugas yang banyak ini ke pembongkaran robot dapat dipahami, meskipun laju pekerjaan menurun cukup kuat.
 Sekali lagi, dalam tugas ini, bersama dengan semua jenis robot yang kikuk dan lambat, peralatan konstruksi yang dikontrol secara telekontraktor
Sekali lagi, dalam tugas ini, bersama dengan semua jenis robot yang kikuk dan lambat, peralatan konstruksi yang dikontrol secara telekontraktorNgomong-ngomong, soal langkahnya, sedikit penyimpangan. Pada tahun 1986, robot bergerak lebih lambat, bahkan kurang akurat dan dapat diandalkan, dan setiap hari penundaan dengan penguburan SNF dari atap Chernobyl NPP unit 4 menyebabkan penghapusan tambahan radionuklida - oleh angin dan air. Itulah sebabnya, mencoba melakukan tugas pembersihan dengan robot, dan memastikan bahwa itu terlalu lambat, para likuidator kecelakaan Chernobyl kembali ke realisasi tugas ini oleh orang-orang. Lambatnya dan tidak dapat diandalkannya robotika menjadi alasan utama penggunaannya yang kecil, dan bukan radiasi dan “kondisi mengerikan”, seperti yang dikatakan para pengembang robot tersebut. Sebagai buktinya, saya akan memberikan sepotong video dokumenter:
Tapi kembali ke Fukushima. Bersamaan dengan membongkar puing-puing dan mengirimkan limbah radioaktif padat ke dalam wadah di blok yang terkontaminasi, ada (dan) tugas lain yang tidak menyenangkan - dekontaminasi dinding, lantai, langit-langit, dan sebagainya - semua elemen struktural yang tidak dapat dengan mudah dihilangkan dari tempat pekerjaan di masa depan. Radionuklida terlempar keluar selama fase aktif dari kecelakaan yang terjadi pada permukaan ini - di suatu tempat mereka dapat dibersihkan, dan di suatu tempat itu perlu dilepaskan. Pilihan yang baik adalah peledakan es - membombardir permukaan dengan partikel-partikel es kering (dari CO2), diikuti dengan pengisapan pada filter dari semua yang terjadi. Namun, sistem itu sendiri untuk pembersihan semacam itu agak rumit - awalnya, mereka mencoba untuk menginstalnya pada Husqvarna DXR-140 yang sama dengan berat 985 kg, tetapi hasilnya tidak terlalu baik. Tapi kita ada di Jepang! Tanah air robot aneh! Dan hasilnya melebihi semua harapan.
Kereta robot terdiri dari empat kereta, yang pertama dilengkapi dengan manipulator dekontaminasi, sedangkan sisanya membawa sistem penghasil es kering, penyedot debu, filter, berbagai cairan pembersih, dll.Secara umum, sekitar selusin mekanisme khusus diciptakan untuk tugas dekontaminasi, termasuk paling mudah untuk membersihkan lantai dan paling aneh untuk membersihkan langit-langit. Pada saat yang sama, sejauh yang Anda mengerti, hasil bukan tes, tetapi kerja nyata pada blok masih agak sederhana dan lebih seperti tes yang sama, hanya di dunia nyata. Termasuk, kereta megarobo yang ditunjukkan di atas belum diluncurkan ke blok (tampaknya).
Teknologi dekontaminasi - manipulator yang dipasang di ujung tangga yang dapat ditarik dari jarak jauh?
Contoh lain dari mesin dekontaminasi yang aneh.
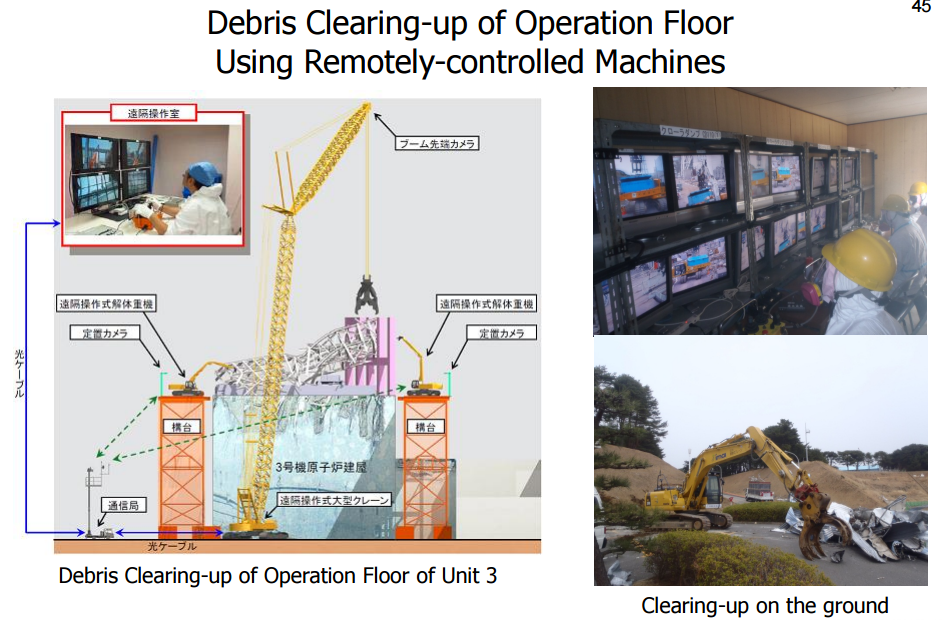
Akhirnya, tugas paling penting terakhir di mana orang Jepang merancang robot yang dikendalikan dari jarak jauh adalah membersihkan kolam pemaparan. Tugas ini paling sulit karena di sini, di samping struktur yang tidak stabil di air berlumpur, kita harus berurusan dengan medan radiasi besar (terutama mengambil sampah dari rak dengan bahan bakar nuklir bekas) dan bahaya pecahnya reaksi berantai - misalnya, jika Anda menjatuhkan satu rakitan bahan bakar pada yang lain, sangat mungkin.
Pengambilan video oleh kendaraan bawah air di kolam paparan blok ketiga. Di bawah sampah ini ada beberapa ratus ton bahan bakar bekas!Untuk mengatasi masalah ini, sebuah kompleks yang agak besar dibuat dari robot telecontrolled bawah laut dengan dua manipulator yang tergantung pada overhead crane dan berbagai alat pengangkat. TEPCO berencana untuk mulai menggunakan kompleks ini pada tahun 2017 ketika membersihkan bahan bakar bekas di unit ketiga, di mana pembongkaran SNF akan dimulai pada 2018.
Untuk meringkas, saya ingin mencatat yang berikut:
1. Likuidasi konsekuensi dari kecelakaan di PLTN Fukushima telah menjadi tempat untuk penggunaan besar-besaran peralatan yang dikontrol secara telekontrol, terutama dalam tugas-tugas pengintaian dan pemetaan.
2. Robot seri yang ada tidak dapat mengatasi tugas likuidasi itu sendiri (dan pengintaian di tempat-tempat sulit).
Selama dua atau tiga tahun setelah kecelakaan itu, banyak varian peralatan baru dikembangkan - jelas bahwa pencarian sedang dilakukan untuk bentuk yang berhasil dan efektif untuk bekerja dalam kondisi kecelakaan radiasi di fasilitas industri. Secara total, omong-omong, saya menghitung 43 jenis mobil yang dikendalikan dari jarak jauh yang jatuh ke dalam bingkai laporan TEPCO.3. Pekerjaan mesin yang dikendalikan dari jauh jauh lebih lambat daripada dengan bantuan orang. Ini adalah masalah yang terkenal, dan itu terkait dengan baik kinematika cacat dan mobilitas robot itu sendiri, dan kesulitan dalam memahami situasi oleh operator melalui kamera terpisah: hari ini mereka mencoba untuk menyelesaikan masalah kedua dengan bantuan augmented dan realitas virtual, tetapi lonceng dan peluit modis belum mencapai FAES ( tetapi secara aktif digunakan dalam pengembangan di universitas).PS Untuk beberapa alasan saya tidak mengerti, beberapa video tidak diambil, jika seseorang dapat menyarankan sesuatu - saran.