
Dalam artikel tersebut, kami mempertimbangkan bagian elektronik dari Quadrocopter Pioneer Geoscan baru, yang dirancang untuk mengajarkan robotika. Kami akan berbicara tentang membuat copter, atau lebih tepatnya, pengalaman apa yang kami peroleh dan perubahan apa yang kami buat pada proyek. Pada akhirnya, bagikan rencana untuk masa depan.
1. Mengapa membuat quadrocopter untuk pelatihan di Geoscan
Untuk mengatasi banyak masalah yang diterapkan, kendaraan udara tak berawak (UAV), khususnya, sistem multi-rotor, semakin banyak digunakan. Kehadiran mereka dapat dilihat di banyak bidang, misalnya, dalam foto udara, pengiriman kargo, pengambilan video dari udara, pemantauan objek, serta dalam balapan (drone racing).
Namun, dalam industri yang berkembang pesat dari pesawat tak berawak ada kekurangan tenaga profesional. Staf teknis sebaiknya disiapkan mulai dari sekolah. Hanya semua tahapan masa lalu: dari desain hingga operasi dan modernisasi - dapat menjadi profesional sejati di bidangnya dan memberikan putaran lain dalam pengembangan industri, baik dalam hal teknologi maupun dalam hal melibatkan semakin banyak bidang terkait dalam industri dan memecahkan semakin banyak masalah yang diterapkan .
Dapat dikatakan bahwa penggunaan quadrocopter oleh anak sekolah, siswa dan amatir sebagai robot terbang untuk mempelajari dasar-dasar pengembangan, operasi, dan modernisasi UAV adalah topik yang menarik bagi kami. Sebagai akibatnya, ini dapat mengarah pada penciptaan dasar untuk standar pendidikan baru.
Kami percaya bahwa topik berikut ini adalah yang paling menarik untuk dipelajari:
Memprogram sistem kontrol, menciptakan orientasi dan algoritma navigasi di ruang angkasa, pengenalan lingkungan;
Elektronik - menghubungkan sensor dan mempelajari prinsip kerja mereka, mempelajari struktur sistem pesawat;
Desain rangka dan mekanik, serta studi tentang parameter elektro-mekanis dari helikopter untuk mengoptimalkan mode penerbangan saat memecahkan masalah yang berbeda;
Kontrol helikopter baik dalam mode pilot dan dalam mode operator UAV. Yaitu, secara manual atau otomatis.
Dengan demikian, banyak tugas menarik sedang dibentuk yang dapat dibiarkan dipecahkan untuk generasi muda dalam kerangka lingkaran pendidikan, kompetisi, dan olimpiade.
Berdasarkan hal tersebut di atas dan pengalaman yang ada dalam membuat UAV di Geoscan, kami memutuskan untuk menerapkan ide-ide ini dengan membuat platform perangkat lunak dan elektronik.
Perlu dicatat bahwa untuk sekadar memprogram robot terbang, Anda memerlukan sistem navigasi. Dan jika di jalan masalah ini diselesaikan dengan menggunakan navigasi satelit, maka di dalam ruangan masalah ini tidak memiliki solusi yang jelas. Mengingat bahwa jauh dari selalu mungkin untuk bekerja di jalan karena cuaca, medan sekitar atau keselamatan, navigasi dalam ruangan menjadi suatu keharusan. Sistem navigasi mana yang telah kami pilih akan dijelaskan di bawah ini.
2. Versi pertama elektronik dari copter "sekolah"
Untuk membuat helikopter kecil, perlu untuk mengurangi massa dan dimensi elektronik seminimal mungkin. Untuk melakukan ini, adalah logis untuk menerapkan solusi papan tunggal yang berisi autopilot (AP) dengan sensor, pengontrol motor, komunikasi radio, catu daya dan konektor yang diperlukan. "Single Board" menyederhanakan kombinasi elektronik dengan bingkai dan mengurangi jumlah kabel menjadi minimum.
Motor brushless digunakan karena sejumlah keunggulan dibandingkan dengan motor brushless. Motor tersebut lebih efisien dan andal, dan torsi besar dengan bobot yang relatif ringan memungkinkan Anda untuk meninggalkan penggunaan gearbox pada sekrup. Kesulitan tertentu adalah pengembangan pengendali kecepatan untuk motor brushless. Namun berkat pengalaman dalam pengembangan UAV "dewasa", ini tidak menjadi masalah besar. Dari minus dari kelompok motor baling-baling yang dipilih, hanya biaya motor dan regulator yang dapat dicatat, tetapi dibenarkan oleh waktu penerbangan, karakteristik kecepatan yang baik dari helikopter, kemampuan untuk memindahkan muatan yang lebih besar, dan juga memiliki lebih sedikit kekhawatiran tentang membeli dan mengganti motor yang gagal.
Jadi, kami mendekati pembuatan papan prototipe untuk helikopter kecil. Kami tidak akan terlalu memperhatikan papan ini, tetapi hanya mencatat kekurangan utamanya, yang tidak sedikit, terutama karena waktu pengembangan yang sangat sederhana selama tiga minggu.
Pada desain awal, saya ingin mencoba fungsionalitas maksimum helikopter, sehingga magnetometer dan modul navigasi satelit ditempatkan di papan, yang ternyata tidak beroperasi karena kompatibilitas elektromagnetik yang tidak memadai dengan papan. Magnetometer terlalu dekat dengan konduktor daya dan ketika arus melewati konduktor, magnetometer memberikan informasi yang salah. Karena area layar antena keramik tidak mencukupi, penerima GPS menemukan jumlah satelit yang tidak cukup untuk navigasi.
Untuk kemudahan menghubungkan quadrocopter ke komputer, modem Wi-Fi digunakan. Menggunakan antarmuka ini untuk telemetri dan kontrol adalah masalah jika seharusnya bekerja di lingkungan yang bising, misalnya, di pameran atau acara publik lainnya di mana ada banyak perangkat pada 2,4 GHz. Selain itu, modul menunjukkan operasi jaringan yang tidak stabil.

Dari sudut pandang operasi, semuanya juga tidak berjalan dengan lancar. Pertama, kabel fase motor harus disolder ke papan, karena tidak ada konektor untuk mereka. Kesulitannya terletak pada kebutuhan untuk memiliki keterampilan dalam bekerja dengan besi solder dan kemampuan untuk mencampur urutan kabel, yang mengarah ke arah rotasi motor yang salah, dan juga mempersulit perakitan pembongkaran. Kedua, tidak mungkin membuat lubang pemasangan yang nyaman di papan, yang berdampak buruk pada keandalan dan kepraktisan pemasangan papan ke rangka. Ketiga, konektor antarmuka dalam bentuk "pin" standar dengan nada 2 mm tidak selalu nyaman digunakan saat menghubungkan beberapa perangkat.
Antara lain, dimensi papan ternyata lebih besar dari yang diharapkan karena pemasangan elemen satu sisi (dengan pengecualian sejumlah kecil elemen regulator di bagian bawah).

Namun demikian, helikopter itu ternyata adalah seorang pekerja. Autopilot dan regulator Firmware dipindahkan dari
copter "besar" kami . Setelah sedikit menyesuaikan koefisien loop kontrol, kami membuat helikopter melakukan pekerjaan yang sangat baik dengan tugas utamanya - untuk terbang. Dengan motor 1306 3100 kV, sekrup 5 "dan baterai LiPo 2s 1300 mAh, helikopter terbang selama 15-16 menit, dan dengan GoPro3 (80 g) - sekitar 10 menit.
Sebuah penerbangan diimplementasikan dalam sistem navigasi ultrasonik (AS) dari
Marvelmind . Sistem ini terdiri dari dua jenis suar ultrasonik: stasioner dan seluler. Pada saat yang sama, suar bergerak dari sistem yang dipasang pada copter memberikan 3 koordinat posisi ke autopilot dengan akurasi yang cukup rendah (± 5-10 cm) dan sistem kontrol yang kami buat menggabungkan data ini dengan data giroskop dan akselerometer, dan mengontrol posisi spasial dari copter.
3. Gagasan untuk membuat versi baru
Ketika mendekati versi baru dewan, menjadi jelas bagi kami bahwa sejumlah perbaikan diperlukan. Kami memikirkan konsep proyek secara lebih rinci, ketika sebuah visi lengkap tentang area dan metode penggunaan helikopter muncul. Gagasan utama adalah keputusan untuk meninggalkan hanya komponen yang diperlukan di papan tulis dan membuat semacam "motherboard", di mana modul yang menentukan tujuan fungsional helikopter akan dihubungkan. Contoh dari modul tersebut adalah penerima satelit dengan kompas untuk navigasi jalan.
Sekarang papan baru berisi pengendali AP utama dengan sensor - accelerometer, giroskop dan barometer. Barometer diperlukan untuk mode tahan ketinggian, yang sangat menyederhanakan kontrol helikopter dengan kontrol manual. Untuk menyimpan log penerbangan dan parameter autopilot, kami menggunakan chip memori flash terpisah.
Semua komponen elektronik pada papan dan modul ekspansi diberi daya oleh tiga konverter tegangan: 5 V (untuk modul, LED, penerima PPM / SBUS), 3,3 V (untuk modul dan sirkuit mikro di papan), dan 3,3 V lainnya secara terpisah untuk sensor. Tegangan input dari 6 V hingga 14 V, yang sesuai dengan baterai lithium-polimer dengan dua "tiga bank" (2s-3s).

Komunikasi dengan PC adalah melalui saluran radio atau USB. Untuk mengurangi waktu pengembangan, kami menggunakan modul radio
Radiocraft 868 MHz yang siap pakai dengan daya 25 mW.
Modul radio dilengkapi dengan antena chip di papan, serta konektor untuk menghubungkan antena eksternal. Namun, untuk menggunakan konektor antena eksternal, Anda harus bekerja dengan setrika solder. Diasumsikan bahwa pengguna chip akan memiliki antena chip yang cukup. Untuk menghubungkan PC ke copter melalui radio, Anda harus menggunakan modem USB timbal balik yang disediakan dalam kit.

WS2812B LED yang dikontrol RGB bertindak sebagai indikator berbagai peristiwa. Dimungkinkan untuk menghubungkan LED tambahan, kecuali yang ada di papan tulis.

Pengontrol kecepatan motor mampu menahan arus 20 A dan memiliki kemampuan untuk rem aktif, yang secara positif mempengaruhi dinamika kontrol copter.
Tegangan suplai terletak pada baterai LiPo 2s-3s. Regulator terhubung ke AP melalui UART, dan bukan melalui sinyal PWM. Ini memiliki efek yang baik pada kekebalan kebisingan. Ukuran regulator berkurang, dibandingkan dengan versi pertama, karena casing komponen elektronik yang lebih kompak. Selain itu, kami melakukan pemasangan komponen dua arah, yang juga memungkinkan kami untuk mengurangi ukuran papan.

Sekarang ada lubang pemasangan “manusia” di papan untuk memudahkan pemasangan ke bingkai.
Ada konektor yang lebih bermanfaat. Sekarang Anda tidak perlu menyolder kabel motor ke papan. Modul ekspansi terhubung melalui dua konektor di bagian atas papan, dan Anda tidak dapat mengacaukan posisi modul karena perbedaan jumlah pin dan desain konektor itu sendiri.
Konektor Micro-MaTch TE dipilih untuk perlindungan terhadap kerusakan mekanis. Tidak seperti pin 2,54 mm, mereka tidak begitu mudah rusak jika terjatuh atau salah penanganan. Anda juga dapat menghubungkan modul melalui kabel ekstensi untuk memungkinkan modul dilakukan, misalnya, di bawah copter. Antarmuka berikut terhubung ke konektor ini: UART, SPI, I2C, beberapa GPIO, sinyal untuk menghubungkan LED terkontrol tambahan dan catu daya 3,3 V dan 5 V. Level logis antarmuka adalah 3,3 V secara default, tetapi dapat diubah menjadi 5 V. jika diinginkan.
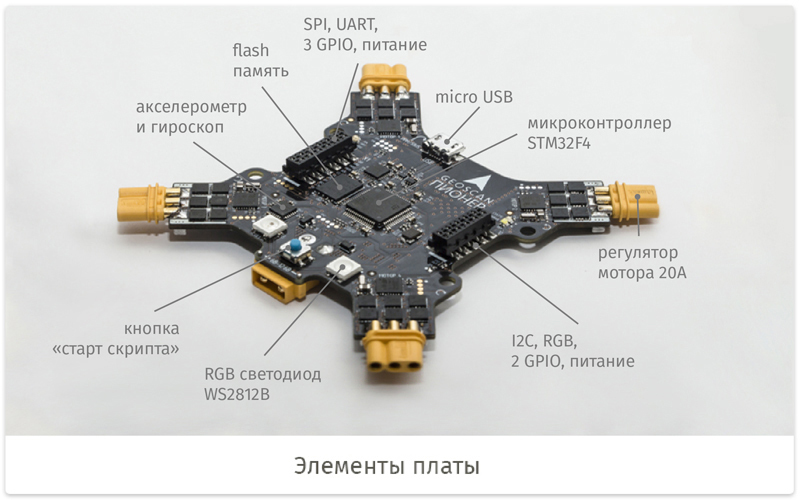
Tombol ini diprogram oleh pengguna atau digunakan secara default untuk menjalankan skrip.
Sedikit tentang komponen perangkat lunak platform. Firmware mikrokontroler autopilot STM32F4 ditulis dalam C ++ dan berjalan pada RTOS
NuttX . Firmware ditutup, tetapi pengguna dapat menulis kodenya dalam bahasa skrip
Lua .
Secara umum, kami memilih dari beberapa bahasa skrip: Python, JavaScript (
IoT.js ), dan Lua. Implementasi standar Python sulit digunakan di bawah MK, karena ukurannya yang terlalu besar. Kami mempertimbangkan opsi dengan MicroPython, tetapi tidak berhasil karena kemungkinan akses langsung ke instruksi assembler. Dan kami tidak ingin memberikan akses kepada mereka untuk pengguna rata-rata. JavaScript memiliki fungsi yang berlebihan dan, untuk menghapus kelebihannya, harus berfungsi. Lua adalah bahasa yang sangat populer, mudah diperluas menggunakan C ++, dan memiliki implementasi yang cocok untuk kita.
Script dapat berisi algoritma kontrol atau hanya serangkaian tindakan, menerima dan memproses data dari sensor, manajemen muatan, dll. Secara umum, berbagai fungsi interaksi dengan robot terbang disediakan, yang dapat digunakan untuk penelitian, tugas kompetitif atau tugas amatir. Script dapat ditulis dan diunggah ke copter menggunakan aplikasi khusus, tetapi Anda juga dapat membuat kode menggunakan
Google Blockly .
Anda dapat mengunduh skrip melalui kabel USB atau saluran radio. Aplikasi pada PC menampilkan informasi telemetri, yang memungkinkan Anda menilai status copter. Dan, tentu saja, ada kontrol dan pengaturan untuk robot.
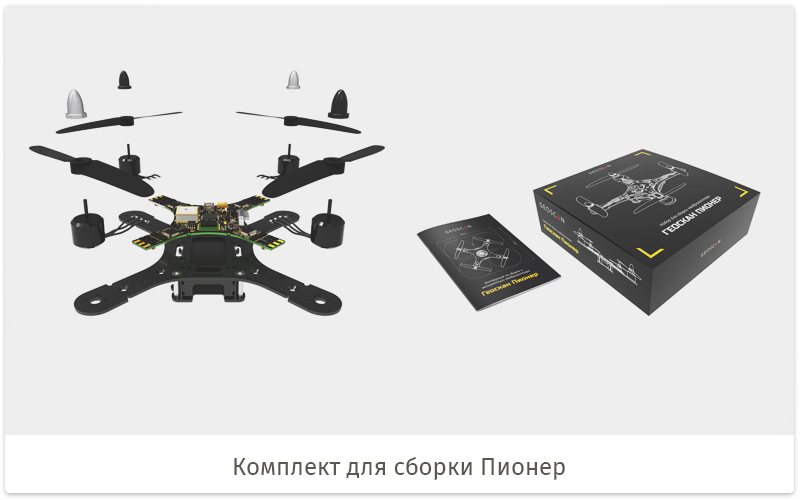
Bingkai, saat ini, terbuat dari serat karbon atau fiberglass dengan menggiling pelat. Itu dirakit dari sejumlah kecil bagian dan memiliki kompartemen baterai.
Secara opsional, Anda dapat menempatkan perlindungan sasis dan sekrup. Sekarang dalam pengembangan bingkai yang terbuat dari plastik, yang akan diproduksi menggunakan teknologi injeksi.

4. Kami memperluas fungsionalitas dengan modul
Seperti disebutkan di atas, dewan memiliki kemampuan untuk memperluas menggunakan plug-in. Modul utama adalah sebagai berikut:
Modul Navigasi adalah penerima untuk sistem pemosisiannya sendiri untuk ultrasound dalam ruangan.
 Modul GPS
Modul GPS - posisi satelit di jalan. Ini juga memiliki magnetometer di papan untuk orientasi kursus.
 Modul ToF
Modul ToF - menerima informasi dari beberapa sensor jarak
ToF yang diarahkan ke berbagai arah, yang memungkinkan untuk mendeteksi rintangan.
 Modul
Modul muat - dilengkapi dengan penangkapan beban elektromagnetik dan LED untuk efek indikasi dan pencahayaan.
 Modul Marvelmind
Modul Marvelmind adalah adaptor untuk sistem penentuan posisi Marvelmind.
 Modul OpenMV
Modul OpenMV adalah adaptor untuk kamera untuk
OpenMV visi komputer.
Modul Sonar - memberikan kemampuan untuk mendapatkan ketinggian menggunakan sensor ultrasonik.
Modul WiFi - menambahkan antarmuka WiFi.
Modul Bluetooth - menambahkan antarmuka Bluetooth.
Tentu saja, banyak modul lain yang kami rencanakan untuk dibuat di masa depan dimungkinkan.
5. Aplikasi praktis dan rencana masa depan
Video promo Geoscan PioneerKami membuat beberapa pengiriman Pelopor ke berbagai lembaga pendidikan. Mereka dibuat berdasarkan versi pertama dari dewan, sehingga pengiriman lebih bersifat percobaan. Namun demikian, helikopter itu cukup cocok sebagai perancang perakitan dan untuk mengajarkan keterampilan piloting.
Kompetisi percontohan diadakan dengan partisipasi Perintis di Alferievo selama konferensi
Aeronet 2016 .
Bagaimana robot terbang Pioneer menarik perhatian di festival robotik
Robofiniste . Ada tes dengan penerbangan delapan, yang, pada kenyataannya, helikopter berhasil diatasi. Sistem bekerja berdasarkan navigasi melalui ultrasound.

Sebuah platform dibuat dengan ruang yang aman dalam bentuk bingkai dengan kisi, di mana semua pengunjung festival memiliki kesempatan untuk mengendalikan helikopter. Dalam hal ini, sistem kontrol tidak memungkinkan untuk mengeluarkan helikopter dari zona yang diizinkan.
Hari ini kami sedang mengerjakan produksi batch Perintis pertama, kami sedang mengembangkan modul ekspansi baru, kami merancang bingkai plastik untuk pencetakan dan kami sedang menyelesaikan pembuatan sistem navigasi ultrasound kami. Presentasi Perintis kita juga direncanakan. Anda dapat mencari tahu tentang tempat dan waktu di situs web Geoscan.