 Ketiga robot ini adalah pendahulu dari Astrobee. Mereka lulus beberapa tes pada ISS, tetapi mereka tidak membantu seseorang.
Ketiga robot ini adalah pendahulu dari Astrobee. Mereka lulus beberapa tes pada ISS, tetapi mereka tidak membantu seseorang.NASA telah menggunakan robot di Stasiun Luar Angkasa Internasional sejak 2006. Selama lebih dari 10 tahun, berbagai sistem telah diuji di ISS. Salah satu proyek yang paling tidak lazim disebut SPHERES (Hold Posisi Sinkron, Terlibat, Berorientasi Ulang, Satelit Eksperimental). Sebagai bagian dari proyek ini, NASA menguji trio robot yang menghabiskan lebih dari 600 jam di stasiun. Selama masa ini, para insinyur dan ilmuwan dapat melakukan sejumlah besar percobaan, termasuk interaksi robot dalam operasi, pemetaan, dan navigasi yang berdiri sendiri. Pada saat yang sama, robot-robot ini tidak dirancang untuk melakukan pekerjaan praktis yang dapat membantu astronot.
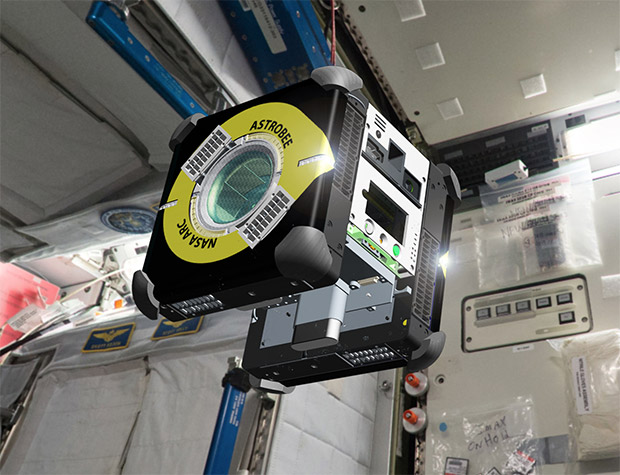
Sekarang saatnya untuk generasi robot baru yang sudah dapat memberikan bantuan langsung kepada orang-orang di atas ISS. Robot seperti itu adalah
Astrobee . Dia dapat mengambil bagian dari tugas rutin dari para astronot, termasuk menganalisis kualitas udara, menentukan tingkat kebisingan dan menyampaikan suara dari stasiun melalui mikrofon dan kamera. Selain itu, robot dilengkapi dengan pemindai RFID, dapat menggunakan beberapa alat, bekerja dengannya menggunakan manipulator kecil.
Pada musim gugur, NASA menunjukkan kemampuan robotnya di salah satu
pusat penelitian NASA . Itu tidak terlihat terlalu mengesankan untuk kemampuannya. Padahal, robot itu berupa kubus dengan panjang muka 32 sentimeter. Tubuh terbuat dari bahan elastis. Di dalam adalah sistem reaktif miniatur yang memungkinkan robot untuk bergerak. Selain itu, sejumlah besar sensor, sistem kontrol, layar sentuh dan beberapa konektor gratis tambahan untuk menambahkan berbagai perangkat keras, termasuk lengan manipulator yang disebutkan di atas, ditempatkan dalam kasing.
Untuk menguji kemampuan sistem reaktif robot, Astrobee ditempatkan di dermaga menyerupai kereta luncur. Kereta luncur ini, pada gilirannya, terletak di salah satu wajah kubus granit yang sangat halus. Menggunakan semburan karbon dioksida terkompresi, sistem meluncur dengan mudah di atas permukaan. Berkat ini, pengembang dapat menguji sistem navigasi dan reaktif, menyesuaikan berbagai elemen jika perlu. Di ruang angkasa, robot akan melonjak dalam gravitasi nol tanpa kereta luncur, bergerak karena dorongan jet.
Pengembang NASA mengklaim bahwa Astrobee bukan generasi
robot SPHERE berikutnya. Bahkan, ini adalah platform yang sama sekali baru, dirakit dari awal dan dirancang untuk operasi otonom pada ISS. Salah satu tambahan yang paling nyata adalah sistem propulsi jet. Itu "mulai" dari arus listrik, dan robot dapat diisi di dermaga. Robot SPHERE, misalnya, juga tahu cara bergerak dengan gerakan jet, tetapi mereka bergantung pada muatan baterai mereka. Seperti disebutkan di atas, ketika elemen tambahan ditambahkan ke desain robot, itu menjadi lebih fungsional. Modul dapat diganti dengan yang lain, menggantikan satu fungsi dengan yang lain jika perlu.
Perbedaan antara robot baru dan pendahulunya dapat disebut fakta bahwa SPHERES sepenuhnya bergantung pada pergerakan "muatan" karbon dioksida yang tersedia. Diyakini bahwa mereka dapat bekerja tidak hanya di dalam stasiun, tetapi juga di luar. Astrobee dalam pengertian ini sangat berbeda dari "rekan-rekannya". Ia dapat bergerak dalam gravitasi nol hanya jika berada di atmosfer. Robot tidak memiliki muatan karbon dioksida, sehingga sistem reaktifnya menggunakan udara stasiun. Artinya, itu tidak bisa bergerak di luar ISS.
Sistem kontrol komputer robot menangkap dan melemparkan udara ke arah yang berlawanan dengan rute yang dimaksud. Astrobee dapat bergerak ke segala arah.
 Foto itu menunjukkan salah satu modul propulsi jet Astrobee.
Foto itu menunjukkan salah satu modul propulsi jet Astrobee.Di balik dinding pelindung salah satu wajah kubus adalah kipas yang menarik udara. Ada elemen serupa lainnya. Gerakan mereka dirancang untuk meminimalkan kekuatan giroskopik. Sistem ini
terus bekerja , menciptakan kantong udara terkompresi di dalam robot. Udara, jika perlu, pergerakan sistem dikeluarkan dari nozel khusus. Mereka terletak di semua wajah Astrobee. Jika nosel ditutup, robot tidak bergerak. Membuka nosel berarti pelepasan udara dan gerakan terkompresi ke arah yang berlawanan.
Secara total, pengembang telah menyediakan 12 nozel, yang ditempatkan dalam urutan khusus. Jika Anda hanya menggunakan satu nozzle per unit waktu, maka kubus dengan gravitasi nol akan bergerak secara acak. Mengelolanya akan sangat sulit. Tetapi jika Anda segera bekerja dengan sepasang nozel, maka kubus akan bergerak secara seimbang.
Jelaslah bahwa keberadaan sistem yang bergerak dengan semburan udara di ruang tertutup udara memerlukan pengembangan langkah-langkah keselamatan khusus. Jika perlu, salah satu astronot dapat mengambil kubus dan memindahkannya ke tempat yang aman. Selain itu, tubuh robot ditutupi dengan bahan lunak, yang meminimalkan kemungkinan kerusakan akibat dampak robot pada elemen rapuh (tampilan laptop, dll.).
Adapun lubang intip stasiun, tidak perlu takut untuk mereka. Mereka terdiri dari empat lapisan kaca. Dua lapisan adalah kacamata tahan lama yang ditutupi oleh dua lapisan lagi dari jenis kaca lainnya. Sekarang NASA perlu membuktikan bahwa dalam keadaan apa pun robot tidak akan dapat menembus salah satu lapisan.
Selain itu, pengembang saat membuat Astrobee memberikan keamanan lengkapnya. Dengan kata lain, jika perangkat lunak sistem "gila," seluruh sistem secara keseluruhan tidak boleh menyebabkan kerusakan kritis pada stasiun. Misalnya, bug dalam perangkat lunak dapat menyebabkan robot berakselerasi sebanyak mungkin dan melewati sekitar 20 meter dalam mode ini (jarak maksimum dalam garis lurus ke ISS). Dalam hal ini, Anda perlu memastikan bahwa ketika Anda menekan setiap elemen stasiun (jendela yang sama), itu tidak akan menyebabkan kerusakan kritis.
Di antara elemen-elemen individual dari sistem propulsi jet robot ada sejumlah besar sensor dan peralatan lain yang dibutuhkan robot untuk operasi otonom. Secara khusus, ia dapat menangani pergerakan barang. Beberapa wajah robot dirancang untuk bekerja dengan beban. Karena adanya sistem penangkapan objek, robot dapat mengangkutnya dari satu ujung stasiun ke yang lain.
Sistem komputer robot terdiri dari tiga tingkatan: rendah, sedang dan tinggi. Tingkat menengah dan tinggi hampir identik, kecuali bahwa tingkat menengah didasarkan pada Linux dan bertanggung jawab untuk sebagian besar fungsi robot. Tetapi level atas berjalan berdasarkan Android dan bertanggung jawab untuk bekerja dengan barang dan mentransfernya dari titik ke titik. Level ini, menurut pengembang, tidak terlalu rumit, sehingga Anda dapat menulis aplikasi untuk Android untuknya, memperluas fungsionalitas sistem.
Sedangkan untuk sensor, Astrobee memiliki kamera navigasi utama dengan bidang pandang 116 °. Selain itu, para pengembang menyediakan kehadiran kamera HD dengan autofocus, yang mampu mentransmisikan informasi dari ISS ke Earth secara real time. Kamera CamBoard Pico Flexx memungkinkan perangkat untuk mendeteksi rintangan dari jarak 4 meter. Dan detektor optik lain menentukan kecepatan perangkat. Jika kecepatannya terlalu tinggi, sejumlah mesin dimatikan untuk menguranginya.
Salah satu keunggulan Astrobee adalah robot dapat bergerak secara otonom di sekitar ISS (di mana-mana kecuali di segmen Rusia). Ini adalah pencapaian yang signifikan dari para insinyur dan ilmuwan, karena di dalam ISS terdapat ruang yang tersegmentasi, dan menavigasi di sana untuk robot tidaklah sesederhana itu. Namun, ini diatur sangat rasional, sehingga robot tidak perlu "terlalu banyak" untuk menavigasi berbagai kompartemen. Dalam memori robot ada peta utama, sehingga dengan satu kerangka lingkungan robot dapat memahami di mana ia berada.
Tetapi berinteraksi dengan orang-orang selama pergerakan adalah tugas yang lebih sulit. Orang-orang bergerak kurang lebih tak terduga, dan robot tidak boleh bertabrakan dengan mereka dalam proses bergerak. Dalam proses pengerjaan Astrobee, masalah ini juga terpecahkan. Omong-omong, mode otonom robot dapat dinonaktifkan dan dikendalikan dari jarak jauh.
Sebuah stasiun dok dirancang untuk robot untuk mengisi baterai perangkat dan mengambil data telemetri.
Seperti disebutkan di atas, untuk melakukan sejumlah operasi untuk robot, manipulator dibuat, itu dicetak pada printer 3D. Sebagian besar waktu manipulator berada dalam keadaan terlipat, tetapi jika perlu, dapat terurai. Menggunakan kamera, robot mengenali benda-benda yang dapat diakses yang dapat dipindahkan. Juga dengan bantuan Astrobee manipulator mampu bergerak di sekitar ruang stasiun. Dalam hal ini, Anda dapat menghemat daya baterai. Jika Anda hanya menggunakan manipulator, dan mematikan sistem reaktif, maka konsumsi energi berkurang hingga 80%.
"Cakar" di ujung manipulator cukup dapat diandalkan - jika robot telah diperbaiki dengan bantuannya, tetapi tidak akan dapat rusak. Namun demikian, jika perlu, astronot dapat melepas robot, kekuatan kompresi disediakan secara khusus pada tingkat yang memungkinkan seseorang dapat dengan mudah mengambil bahkan robot yang telah diperbaiki jika terjadi kesalahan.
Jadi mengapa itu dibutuhkan?
Tugas utama robot adalah membantu para astronot dalam melakukan sejumlah tugas rutin. Terlepas dari apakah robot akan berfungsi secara offline atau akan dikendalikan dari jarak jauh, itu harus dapat menggantikan seseorang. Misalnya, pasang camcorder, amati perilaku berbagai elemen di dalam stasiun, pantau operasi stasiun, dan pantau kualitas udara. Secara khusus, sangat penting untuk menentukan tingkat konsentrasi karbon dioksida. Analisis ini sering dilakukan, tetapi para astronot benar-benar tidak menyukai prosedur monoton ini. Tetapi robot dapat menggantikan orang dalam hal ini, dan menganalisa udara sesering yang diperlukan.
 Membuat tampilan prototipe akhir robot
Membuat tampilan prototipe akhir robotTahun ini robot tidak akan bekerja pada ISS. NASA mengklaim akan meluncurkan stasiunnya pada tahun fiskal 2018. Tiga robot seperti itu akan dikirim sekaligus. Dua akan melakukan tugas utama, dan yang ketiga berfungsi sebagai suplemen. Jika ada robot yang dikirim rusak, maka itu bisa diganti.
Sebelum robot-robot ini tiba di ISS, pendahulunya, SPHERES, akan sudah dihapus. Di masa lalu, perangkat menunjukkan diri mereka dengan baik, dan data yang dikumpulkan oleh mereka sangat membantu para ilmuwan dalam pengembangan robot generasi baru. Satu robot dapat meringankan anggota tim ISS secara signifikan, dan tiga dari robot ini akan sepenuhnya menghilangkan beberapa tugas kecil, tetapi memakan waktu, dari para astronot.