 Medan magnet memutar masing-masing sekrup yang mengontrol gerakan lengan, kaki, dan kepala mainan melalui tali
Medan magnet memutar masing-masing sekrup yang mengontrol gerakan lengan, kaki, dan kepala mainan melalui taliAda dua cara untuk mengontrol robot dari jarak jauh. Entah Anda mencoba melengkapinya dengan sistem propulsi otonom dan sistem navigasi (sangat sulit), atau Anda membuat robot yang sangat kecil yang bergerak dalam medan magnet. Robot dikendalikan oleh magnet eksternal yang besar. Remote control perangkat semacam itu sangat diminati dalam dunia kedokteran, terutama karena perangkat dengan ukuran bahkan
beberapa mikrometer juga dapat dikontrol magnetik. Eksperimen dengan
penempatan kateter jarak jauh
di jantung dan kontrol
probe video di saluran pencernaan telah selesai. Potensi besar micromachine untuk mengantarkan obat ke organ manusia tertentu.
Namun, banyak aplikasi kontrol magnetik yang menjanjikan membutuhkan pekerjaan terkoordinasi bukan hanya satu, tetapi banyak microrobot secara bersamaan. Sampai sekarang, para ilmuwan hanya mampu mencapai gerakan simultan robot identik dalam bidang yang homogen, tetapi tidak secara acak ikut serta dalam kelompok ini. Ya, ada sejumlah percobaan pada kontrol individu robot dari segerombolan. Tetapi dalam semua kasus, robot-robot ini harus berbeda satu sama lain dalam sifat magnetik atau dalam desain. Itulah sebabnya
karya ilmiah fisikawan dari laboratorium penelitian Philips GmbH Innovative Technologies sangat menarik. Mereka belajar memuntir medan magnet di tempat yang sewenang-wenang - dan berhasil melakukan percobaan untuk mengencangkan dan melonggarkan sekrup individual yang terletak bersebelahan.
Sekilas, tidak jelas bagaimana memutar sekrup sewenang-wenang dikaitkan dengan mengendalikan segerombolan robot dalam tubuh manusia. Namun, jika Anda memikirkannya, tugas-tugas ini sangat dekat. Lagipula, mengendalikan medan magnet dengan keakuratan seperti itu memungkinkan Anda untuk membuat traksi magnetik di area spesifik tubuh manusia - tepat di tempat perangkat magnetik itu berada, yang harus digerakkan.
Mengencangkan masing-masing sekrup dengan medan magnetPrinsip kerja
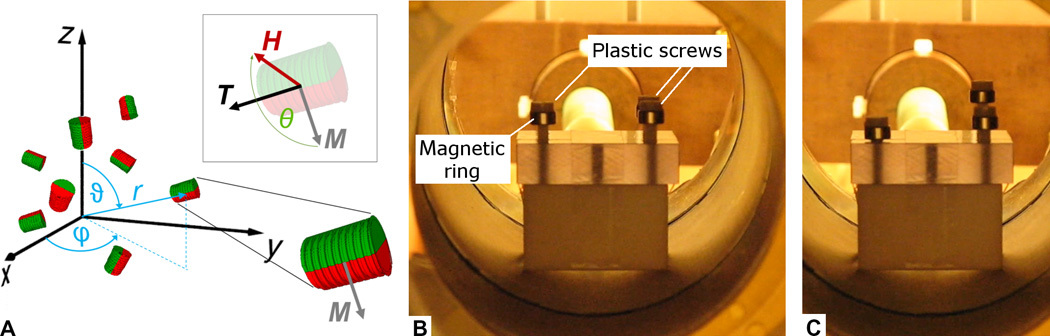
Ilustrasi di bawah ini menunjukkan aplikator lapangan dengan diameter lubang 12 cm, terdiri dari tiga pasang gulungan tembaga yang dipasang di sepanjang tiga sumbu spasial, dan inti besi silinder untuk memperkuat medan di sepanjang sumbu z. Desainnya agak mirip pada prinsipnya dengan perangkat pencitraan partikel magnetik (MPI), tetapi tugas yang berlawanan diajukan di sini - bukan untuk mendeteksi lokasi partikel magnetik dengan akurasi tinggi, tetapi untuk mengontrol objek-objek ini dengan akurasi tinggi yang sama.

Jika arus dengan amplitudo yang sama mengalir di sepanjang dua kumparan, maka bidang seragam spasial muncul di sepanjang sumbu, seperti pada
cincin Helmholtz . Kombinasi tiga pasang gulungan memungkinkan Anda untuk menghasilkan bidang dinamis seragam dengan orientasi sewenang-wenang. Jika arus dengan amplitudo yang sama mengalir dalam arah yang berlawanan, maka sepasang kumparan bekerja seperti
kumparan Maxwell , membentuk bidang gradien (pada ilustrasi di kanan atas dan pada ilustrasi di bawah).
 Konfigurasi Coil Ideal Maxwell
Konfigurasi Coil Ideal MaxwellKetika melakukan percobaan konseptual, para ilmuwan membuktikan bahwa mereka dapat mengencangkan sekrup yang ditempatkan secara harfiah di tempat-tempat acak di dalam generator lapangan.
Ilustrasi menunjukkan bagaimana arah vektor magnetisasi dihitung dan torsi dihasilkan. Fisika memungkinkan Anda untuk mengencangkan / melepaskan semua sekrup pada saat yang sama atau setiap sekrup secara terpisah.
Para ilmuwan percaya bahwa perangkat yang dikembangkan sudah dapat digunakan dalam pengobatan. Misalnya, untuk mengencangkan dan melonggarkan sekrup yang ditempatkan di dalam kapsul atau implan yang terpasang erat pada jaringan di sekitar tubuh manusia. Jika kapsul terkunci, itu tidak akan berputar dengan sekrup. Selain itu, kekuatan fiksasi kapsul bisa sangat tinggi sehingga memungkinkan Anda untuk memasang sekrup atau sekrup langsung ke jaringan tubuh manusia. Misalnya di tulang.
Mungkin memuntir perangkat dengan medan magnet dapat diterapkan untuk pergerakan mikrorobot dalam cairan tubuh. Dalam hal ini, dokter akan menerima kontrol selektif yang sangat dibutuhkan dari segerombolan microrobots dalam tubuh manusia.
Selain itu, mesin yang lebih kompleks dalam tubuh manusia dapat dikontrol dengan memutar sekrup kontrol individu, seperti yang ditunjukkan dalam KDPV menggunakan mainan Lego sebagai contoh (ilustrasi dari makalah ilmiah). Ini bisa berupa beberapa implan kompleks di dalam tubuh. Mungkin dalam ortopedi, bentuk implan akan disesuaikan tanpa perlu menggunakan motor atau memasang baterai di dalam perangkat. Para ilmuwan menyarankan penggunaan praktis rotasi jarak jauh sekrup pada perangkat untuk pemanjangan ekstremitas, untuk mengendalikan micropumps, untuk pelepasan obat jarak jauh, dan untuk pengenalan akurat butir radioaktif tipe
103 Pd ke dalam tumor kanker (terapi radiasi kontak).
Artikel ilmiah ini
diterbitkan pada 15 Februari 2017 di jurnal
Science Robotics (doi: 10.1126 / scirobotics.aal2845).