Beberapa waktu yang lalu, tersandung di Internet pada artikel dan video tentang copters, saya pikir itu sulit dan tidak dapat diakses oleh semua orang. Tetapi keinginan untuk menjadi pemandu penerbangan luar biasa, dan setelah mempelajari massa materi tentang topik ini, ia menyimpulkan untuk dirinya sendiri bahwa tidak perlu membeli versi yang sudah jadi untuk membangun quadrocopter, yaitu membangun dari awal dan dirinya sendiri. Sekarang saya ingin berbagi dengan Anda pengalaman saya dalam membangun quadrocopter di MultiWii SE v2.5. Dalam artikel ini saya akan mencoba untuk menjelaskan secara rinci seluruh proses membangun quadrocopter dari nol ke penerbangan pertama ke pemula absolut dalam topik ini, yang dia sendiri beberapa waktu lalu.
Sedikit teori tentang terbang quadcopter
Kami akan merakit copter pada bingkai klasik bentuk "X". Mengelola helikopter tidak semudah kelihatannya pada pandangan pertama, tidak memiliki bagian depan dan belakang seperti pada mobil yang dikendalikan radio. Dengan perintah "maju", quadrocopter tidak terbang di mana pilot melihat, tetapi di mana hidung quadrocopter menunjuk (ada
panah yang sesuai pada pengontrol penerbangan), ini adalah bahaya besar bagi pemula, karena dari tanah mungkin sulit untuk menentukan di mana hidung helikopter itu, jadi ketika membangunnya Anda harus menandainya, misalnya, dengan sinar warna yang berbeda atau dengan menempatkan LED. Kontrol helikopter, mis. untuk menentukan dan mengatur orientasinya di ruang angkasa, kita akan melempar, menggulung dan menguap sudut + memanjat. Penerbangan dari helikopter ke arah yang diperlukan dicapai dengan mengubah tiga sudut ini. Misalnya, untuk terbang ke depan, helikopter harus menekuk hidungnya ke tanah (pitch).
Throttle - gas, panjat
Aileron - roll, aileron (roll)
Lift - lift, pitch (pitch)
Rudder - rudder, yaw (yaw)
Motor:
LFW - kiri depan, rotasi searah jarum jam
RFC - kanan depan, rotasi berlawanan arah jarum jam
LBC - kiri belakang, rotasi berlawanan arah jarum jam
RBW - kanan belakang, rotasi searah jarum jam

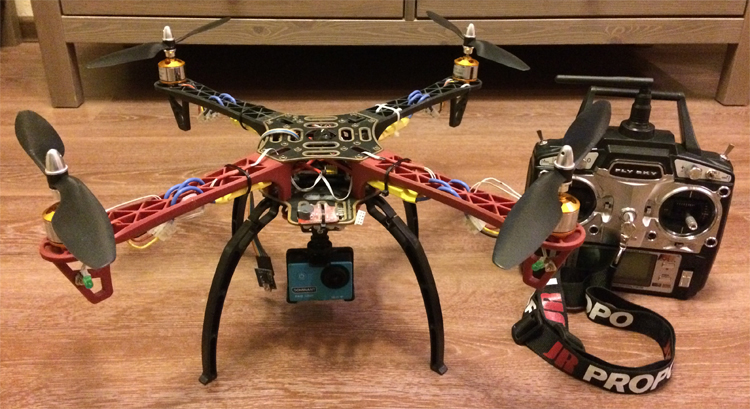
Komponen yang diperlukan:
Pengendali Penerbangan CRIUS MultiWii SE v2.5
Programmer FTDI
Bingkai HJ450
Motor 2212-1000KV - 4 pcs.
ESC 30A pengendali kecepatan - 4 pcs.
Baterai 11.1V 2200Mah 3S 40C Li-Po ( contoh )
Pengisi Daya Baterai B3 AC 2S-3S 7.4V 11.1V Li-Po Battery Balancer
Kawat Baterai T-Plug
Klem plastik
Peralatan kontrol FlySky FS-T6 2.4G 6CH lengkap dengan penerima
Baling-baling 1045 (10x4,5) CW / CCW - 2 pcs. rotasi searah jarum jam + 2 lembar. rotasi berlawanan arah jarum jam; ambil lebih banyak baling-baling, karena sambil belajar bagaimana mengendalikan helikopter, ketika mereka jatuh, mereka akan hancur sekali
Opsional:
Kaki pendaratan
Battery tester Li-po Battery Voltage Indicator Tester Low Voltage (akan memberi sinyal ketika baterai kosong)
Skema Perakitan:

Sebelum perakitan, perlu untuk mengkalibrasi pengendali ESC, prosesnya adalah sebagai berikut: kita menghubungkan motor ke regulator, menghubungkan regulator ke saluran gas pada penerima (CH3) dan ke baterai, naikkan tongkat gas pada peralatan kontrol hingga berhenti, nyalakan appu - suara khas dibuat, turunkan gas stick ke bawah sepanjang jalan - suara karakteristik dibuat, kemudian kami uji - menaikkan / menurunkan operasi gas stick - periksa, matikan appu - regulator dikalibrasi; menggunakan analogi ini, kalibrasi semua ESC (
video yang cocok untuk kejelasan).
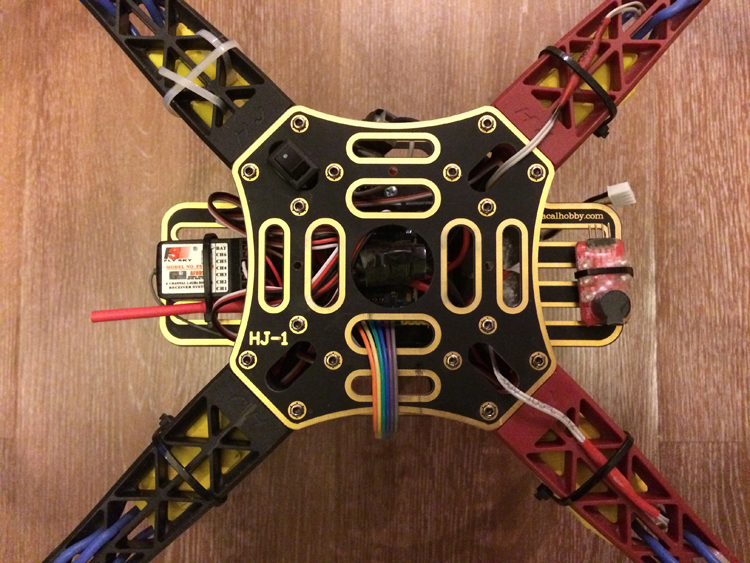
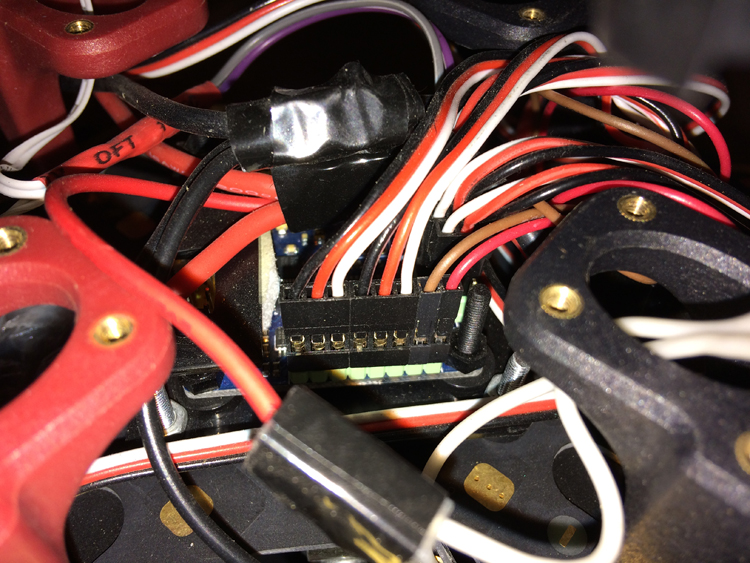
Kami merakit bingkai, memasang MultiWii, memasang motor, menghubungkan pengontrol ESC: ke motor, ke MultiWii dan ke akumulator (kami menghubungkan "plus" dan "minus" dari regulator dan menghubungkannya ke baterai "+" dan "-"). Perhatian, untuk mengubah arah putaran motor, Anda hanya perlu menukar dua kabel dari tiga kabel yang berasal dari motor ke ESC. Sangat diinginkan untuk menginstal MultiWii pada frame melalui platform (saya melakukannya
sendiri , tetapi Anda dapat membelinya) untuk menghindari hubungan pendek pada case dan untuk akurasi data; Saya juga membuat "pertanian kolektif" kecil untuk barometer - Saya menutupnya dengan karet busa untuk mengurangi kesalahan dalam data.
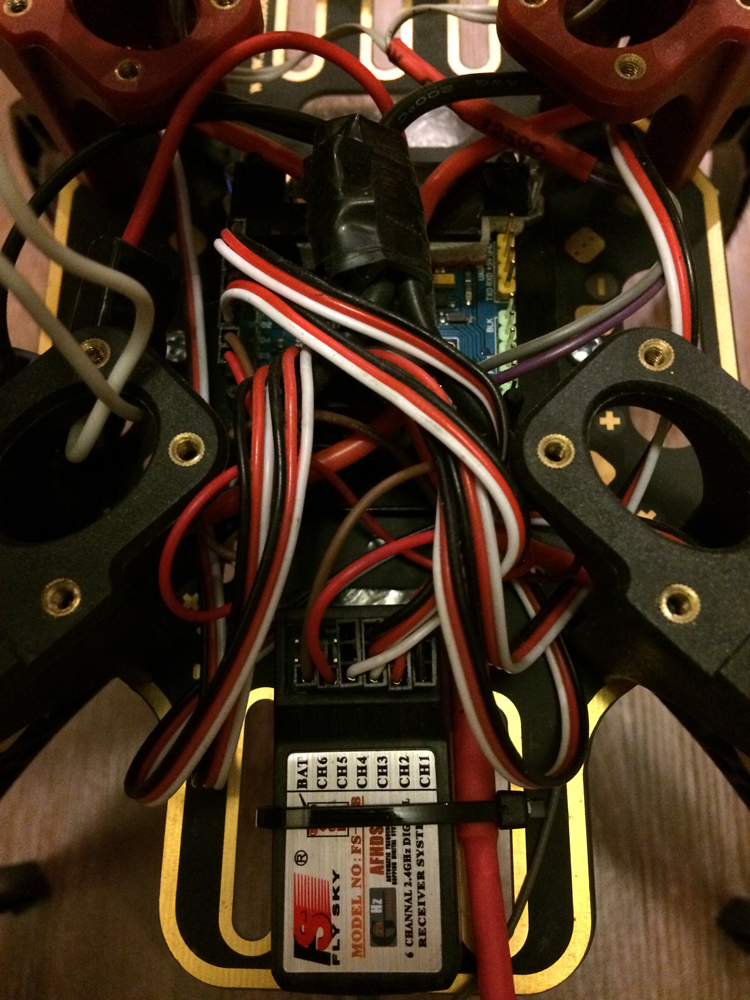
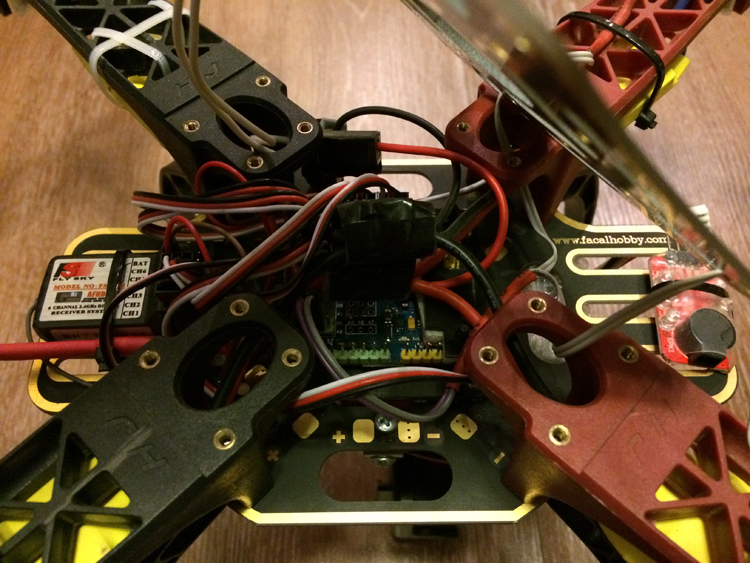
Saluran tambahan CH5 dan CH6 dapat digunakan untuk mengaktifkan fungsi: tahan ketinggian, pulang ke rumah, kontrol kamera gimbal, dll., Anda dapat membaca lebih lanjut di
artikel ini. Dioda saya terhubung ke "+" dan "-" di A2. Programmer FTDI terhubung ke konektor FTDI yang sesuai di papan tulis.






Setelah kami mengumpulkan dan menghubungkan semuanya, Anda harus mengisi firmware di MultiWii, Anda perlu melakukan ini melalui program Arduino IDE (Anda dapat mengunduh versi saat ini di
sini ). Kami menghubungkan MultiWii ke PC melalui programmer FTDI, mulai Arduino IDE, pilih port COM yang terhubung papan di menu, juga pilih jenis papan di menu, buka firmware (tautan di akhir artikel), buka file MultiWii.ino, Anda akan melihat di atas beberapa tab, kita hanya akan tertarik pada config.h, di dalamnya kita perlu mengkonfigurasi firmware - tergantung pada pengaturan yang diperlukan Anda perlu batalkan komentar (hapus "//") salah satu baris di bagian yang diinginkan (tautan ke file config.h dengan pengaturan saya di akhir artikel), setelah pengaturan, isi firmware di MultiWii.
Sekarang kita perlu melanjutkan mengkonfigurasi copter melalui GUI, untuk ini kita akan menggunakan program MultiWiiConf (tautan di akhir artikel). Kami menghubungkan MultiWii ke PC melalui pemrogram FTDI, meluncurkan MultiWiiConf, pilih port COM yang mana papan terhubung dalam menu, tekan tombol MULAI (nilai-nilai akan muncul pada grafik), sebelum mengedit parameter - tekan BACA, untuk menyimpan parameter - tekan MENULIS. Setelah Anda memilih port dan tekan MULAI (Anda melihat bahwa grafik telah hidup, data tiba), Anda perlu mengkalibrasi sensor: untuk mengkalibrasi accelerometer, mengatur paralel copter ke cakrawala dan tekan tombol CALIB_ACC, GUI akan membeku untuk sementara waktu, kemudian pastikan bahwa sumbu ROLL dan PITCH paralel ; untuk mengkalibrasi magnetometer (kompas) - tekan tombol CALIB_MAG dan putar copter di semua sumbu atau secara bergantian letakkan copter pada tulang rusuk selama 30 detik. Juga, setelah berhasil menyambungkan program konfigurator ke copter Anda, di kanan atas Anda akan melihat bilah biru yang menunjukkan saluran kendali jarak jauh Anda, gerakkan tongkat untuk memastikan semuanya bekerja dengan benar. Tongkat di posisi min harus menunjukkan nilai 1000, di tengah 1500 dan di max 2000; jika tidak demikian, rapikan remote control sesuai dengan instruksi untuk itu (tautan di akhir artikel). Ingat bahwa strip harus bergerak sesuai dengan pergerakan tongkat, mis. jika Anda menaikkan throttle stick ke atas, maka strip harus naik (sama untuk saluran lain), jika tidak demikian, balikkan saluran remote control Anda. Juga di GUI, Anda dapat mengatur fungsi untuk ditambahkan. saluran, seperti retensi tinggi (BARO). Fungsi penyelarasan horizontal (LEVEL) harus selalu diaktifkan! Berikut adalah
video yang sesuai untuk menggambarkan operasi program MultiWiiConf.
Beberapa penyimpangan pada topik
Jangan berharap fungsi untuk menahan ketinggian (BARO) dari hard melayang pada suatu titik, seperti barometer digunakan untuk ini - copter pasti akan mencoba menjaga ketinggian tempat Anda mengaktifkan fungsi, tetapi ia akan berenang dalam radius ± beberapa meter, hanya untuk keakuratan data dari barometer dan untuk melindunginya dari pengaruh eksternal, saya membuat “pertanian kolektif” dengan karet busa. Ingat, retensi ketinggian harus diaktifkan pada gas yang melayang, mis. maka ketika Anda menggunakan tongkat gas untuk memastikan bahwa copter ± dipegang pada ketinggian yang sama dan tidak disarankan untuk menyentuh gas setelah mengaktifkan fungsinya. Untuk melayang lebih akurat pada suatu titik - lebih baik menggunakan modul GPS opsional.
Kursus tahan fungsi (MAG) sangat berubah-ubah dan penggunaannya bagi saya berakhir menyedihkan, setelah aktivasi dan lepas landas, helikopter mulai berputar seperti gasing berputar dan dengan cepat terbang menjauh dari saya, upaya untuk menentukan hidung helikopter dan mengembalikannya ke kursus tidak berhasil, saya tidak punya pilihan cara membuang gas dan berlari menuju titik yang jatuh dari langit. Berikut adalah
video dan
foto pendek setelah musim gugur. Mungkin perilaku ini disebabkan oleh kompas yang tidak dikalibrasi atau gangguan magnet, atau sesuatu yang lain; secara umum, baca info di Internet sebelum digunakan dan berhati-hatilah.
Untuk masa depan, mungkin bermanfaat bagi Anda untuk tidak membawa laptop dengan program MultiWiiConf saat Anda bepergian - Anda dapat menghubungkan modul Bluetooth HC-05 ke pengontrol MultiWii (terhubung ke konektor UART) dan melalui aplikasi Android (
Konfigurasi MultiWii dan
Stasiun Ground EZ-GUI ) via Bluetooth terhubung ke copter, dan buat pengaturan yang diperlukan, mirip dengan yang ada di MultiWiiConf.
Prosedur untuk menghidupkan mesin adalah sebagai berikut: nyalakan daya pada copter (mencicit), nyalakan aplikasi, ambil tongkat gas dari posisi bawah ke kanan - motor start (pakan) dan putar saat idle, sekarang untuk lepas landas dengan menambahkan gas; untuk menghentikan mesin, ambil throttle stick dari posisi bawah ke kiri - motor telah berhenti, matikan power pada copter, matikan aplikasi.
Itu saja, saya harap artikel saya akan bermanfaat bagi Anda, tetapi sekarang Anda dapat menginstal baling-baling dan meneruskan, dalam kasus kami, naik, semoga sukses dan jatuh lebih sedikit.
Video singkat penerbangan saya
Tautan unduhan:
Arsip - firmware MultiWii + program MultiWiiConf
File config.h dengan pengaturan saya
Manual untuk FlySky FS-T6
PS - lanjutan di sini:
"Menginstal FPV dan telemetri pada quadrocopter"