Promotor robot - Oscar. Manipulator
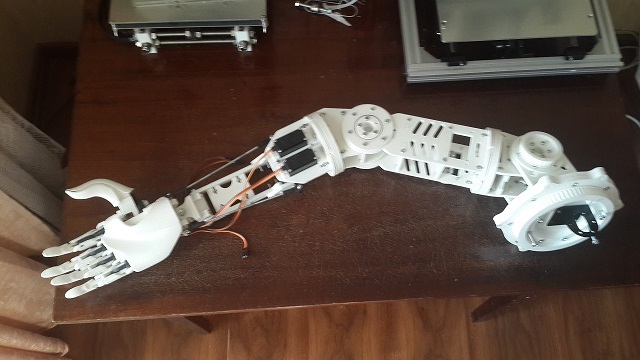 Hari ini kami ingin berbicara tentang perangkat manipulator robot promo Oscar. Meskipun pada awalnya tidak ada persyaratan industri yang ketat yang disampaikan kepada manipulator, namun, tujuan kami adalah untuk membuat solusi praktis dan estetika, sementara tidak terlalu mahal dan relatif mudah dibuat di rumah.Panjang manipulator dari bahu ke ujung jari adalah 0,6 meter, berat - 2,25 kg. Bahan pembuatan - PLA. Manipulator secara kondisional dapat dibagi menjadi 3 komponen:
Hari ini kami ingin berbicara tentang perangkat manipulator robot promo Oscar. Meskipun pada awalnya tidak ada persyaratan industri yang ketat yang disampaikan kepada manipulator, namun, tujuan kami adalah untuk membuat solusi praktis dan estetika, sementara tidak terlalu mahal dan relatif mudah dibuat di rumah.Panjang manipulator dari bahu ke ujung jari adalah 0,6 meter, berat - 2,25 kg. Bahan pembuatan - PLA. Manipulator secara kondisional dapat dibagi menjadi 3 komponen:- Sikat bionik
- Pergelangan Tangan (2 derajat kebebasan)
- Sendi siku dan bahu (kebebasan 5 derajat)
Hal ini disebabkan oleh fakta bahwa masing-masing komponen memiliki solusi teknisnya sendiri.Sikat bionik
Untuk awal yang cepat dan mudah, diputuskan untuk mengambil proyek Hackberry open-source sebagai dasar. Desain sikat sedikit dimodifikasi agar sesuai dengan kebutuhan Anda.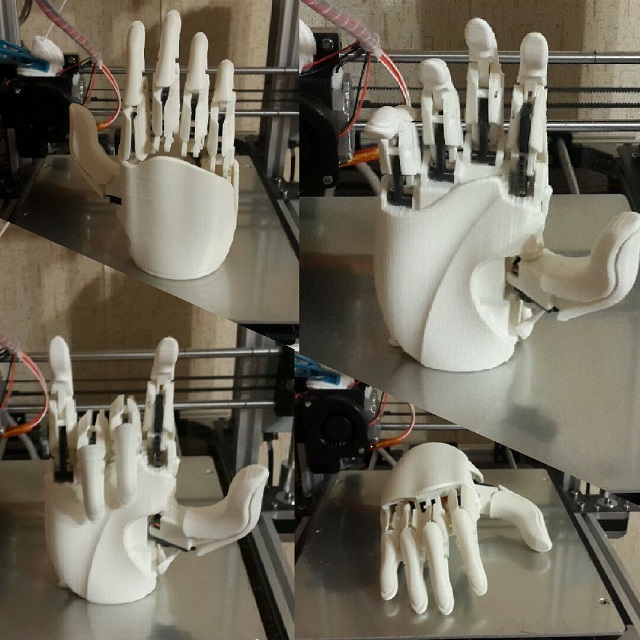 Drive kontrol jari terletak di sikat itu sendiri. Mereka bertiga. Satu di ibu jari, satu di jari telunjuk, dan satu di sisanya.Dengan bantuan pegangan yang begitu pintar, robot dapat mengambil beberapa benda tebal, misalnya sebotol air mineral, serta berjabat tangan dengan seseorang atau mengambil benda yang lebih kecil / tipis, memegangnya di antara ibu jari dan jari telunjuk.
Drive kontrol jari terletak di sikat itu sendiri. Mereka bertiga. Satu di ibu jari, satu di jari telunjuk, dan satu di sisanya.Dengan bantuan pegangan yang begitu pintar, robot dapat mengambil beberapa benda tebal, misalnya sebotol air mineral, serta berjabat tangan dengan seseorang atau mengambil benda yang lebih kecil / tipis, memegangnya di antara ibu jari dan jari telunjuk.Pergelangan tangan
Pergelangan tangan memiliki penggerak diferensial dan dikendalikan oleh sepasang batang. Salah satu ujung batang melekat pada pangkal sikat, yang lain ke tuas servo. Dengan demikian, 2 derajat kebebasan diperoleh.Untuk estetika yang lebih besar, model utama untuk tubuh lengan dirancang dan dicetak pada printer 3D. Dan kasingnya dibuat dengan cetakan vakum. Hasilnya adalah tangan antropomorfik.
Dan kasingnya dibuat dengan cetakan vakum. Hasilnya adalah tangan antropomorfik. Menurut saya itu terlihat cantik.
Menurut saya itu terlihat cantik.Sendi siku dan bahu
Di sini, menurut saya, kesenangan dimulai. Untuk mencapai perilaku yang dapat diterima dari sendi-sendi ini, berbeda dengan tahap perkembangan pergelangan tangan yang sangat halus, kami harus mengotak-atik mekanisme dan kontrolnya.Manajemen, diputuskan untuk menerapkan servos berdasarkan DPT 37Dx70L biasa, yang kami miliki dalam jumlah yang tepat dari proyek sebelumnya.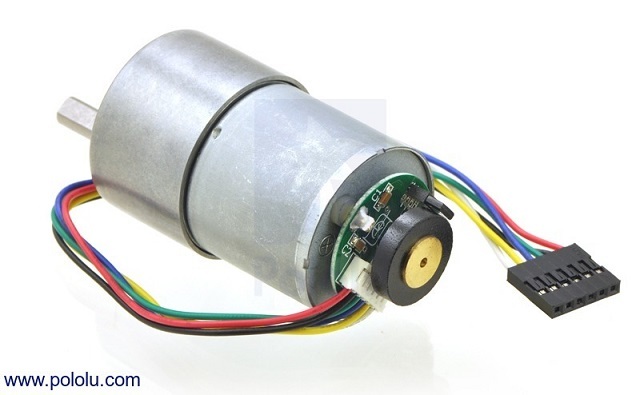 Secara umum, kami menyukai data DPT, tetapi mereka memiliki satu kelemahan, yaitu tingkat kebisingan. Di masa depan kami berencana untuk menggantinya dengan yang identik, tetapi tidak terlalu berisik.
Secara umum, kami menyukai data DPT, tetapi mereka memiliki satu kelemahan, yaitu tingkat kebisingan. Di masa depan kami berencana untuk menggantinya dengan yang identik, tetapi tidak terlalu berisik. Bantalan dan profil dicetak pada printer 3D membentuk dasar dari konstruksi bantalan sendi. Bantalan terdiri dari empat lekukan setengah disatukan berpasangan, dan bola logam 4, 6 dan 8 milimeter.
Bantalan dan profil dicetak pada printer 3D membentuk dasar dari konstruksi bantalan sendi. Bantalan terdiri dari empat lekukan setengah disatukan berpasangan, dan bola logam 4, 6 dan 8 milimeter.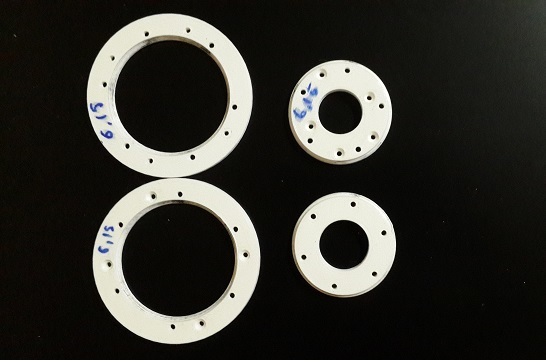 Profil memiliki alur untuk interkoneksi, pengaku tambahan juga digunakan. Semua kebahagiaan ini disatukan oleh baut.
Profil memiliki alur untuk interkoneksi, pengaku tambahan juga digunakan. Semua kebahagiaan ini disatukan oleh baut.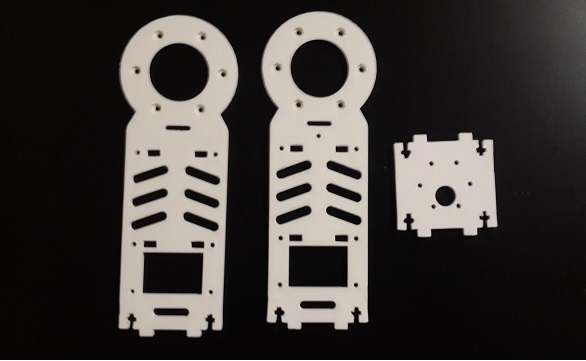 Awalnya, dalam beberapa derajat, poros motor terpasang ke bantalan melalui kopling.
Awalnya, dalam beberapa derajat, poros motor terpasang ke bantalan melalui kopling.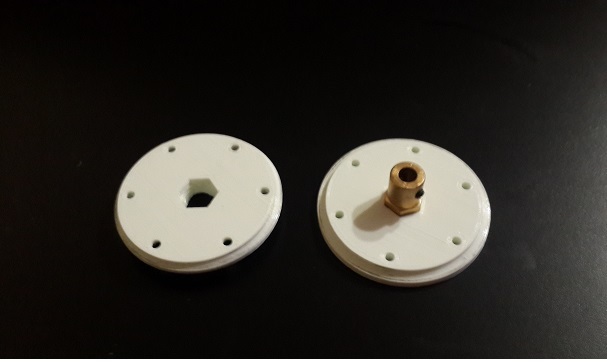 Tetapi karena kurangnya drive dengan kecepatan dan upaya yang diperlukan, kami mendesain ulang desain untuk drive belt.
Tetapi karena kurangnya drive dengan kecepatan dan upaya yang diperlukan, kami mendesain ulang desain untuk drive belt.Serva
Persyaratan berikut diberlakukan pada manajemen "server":- Kontrol Poros Output
- Penyesuaian kecepatan
- Penyesuaian usaha (kondisi dengan tanda bintang)
Pertama, kami mencari proyek serupa di Internet - kami bukan satu-satunya yang "pintar". Berdasarkan salah satu proyek yang kami sukai, kami sangat tidak senang dengan hasilnya. Penempatan poros penggerak sangat biasa-biasa saja.Akibatnya, kami puas hanya dengan pengembangan solusi khusus kami. Dalam hal ini, artikel "Mempertahankan posisi dalam drive servo: regulasi bawahan vs mode langkah" banyak membantu , yang banyak terima kasih kepada penulis!Rangkaian kontrol umum berubah sebagai berikut (sirkuit diambil dari artikel yang disebutkan di atas):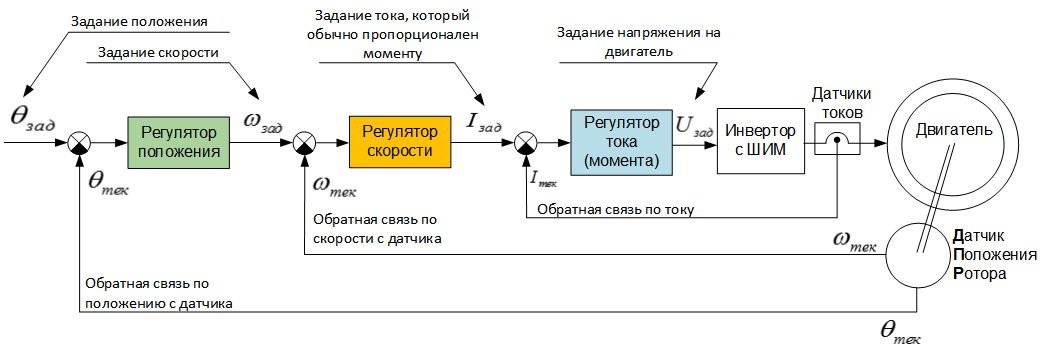 Magnetic encoder as5045 digunakan sebagai sensor posisi di sirkuit kami, dan pembacaan saat ini diambil menggunakan sensor GY-712 5A.Awalnya, Arduino Mega digunakan untuk mengontrol drive, dan meskipun hasilnya memuaskan, kami akhirnya beralih ke STM32F4 yang lebih andal dan berbasis tabung.Ini adalah hasil dari drive:Setelah mencapai hasil yang dapat diterima dalam mengendalikan poros output "servo" tanpa beban, itu ditempatkan di lengan manipulator. Dan "tiba-tiba" ternyata mengendalikan drive dan manipulator adalah dua hal yang berbeda. Masalahnya adalah bahwa manipulator "sosis" pada titik target, ada yang disebut "serge bounce". Kami mencoba berbagai koefisien regulator, tetapi semuanya sia-sia.Penyebab masalah kami adalah gravitasi terkenal. Dalam posisi menggantung (ketika lengan diturunkan secara vertikal ke bawah), untuk mengatur 10 derajat pada sambungan bahu, diperlukan satu koefisien regulator, dan koefisien lainnya untuk mencapai penyimpangan yang sama pada posisi horizontal. Karena sistem tidak terlalu dinamis, maka untuk menentukan tingkat pengaruh gravitasi dan selanjutnya kompensasinya, kami menggunakan accelerometer tiga-sumbu yang biasa, yang memecahkan masalah kami. Keputusan ini tidak berpura-pura menjadi obat mujarab - itu hanya cara kami. Mungkin di antara pembaca artikel kami ada pengemudi listrik berpengalaman yang dapat memberi saran sesuatu.Berikut adalah tes video dari salah satu derajat bahu (ternyata, tingkat paling sulit dalam hal manajemen).Dan tentu saja, seluruh video dari manipulator:
Magnetic encoder as5045 digunakan sebagai sensor posisi di sirkuit kami, dan pembacaan saat ini diambil menggunakan sensor GY-712 5A.Awalnya, Arduino Mega digunakan untuk mengontrol drive, dan meskipun hasilnya memuaskan, kami akhirnya beralih ke STM32F4 yang lebih andal dan berbasis tabung.Ini adalah hasil dari drive:Setelah mencapai hasil yang dapat diterima dalam mengendalikan poros output "servo" tanpa beban, itu ditempatkan di lengan manipulator. Dan "tiba-tiba" ternyata mengendalikan drive dan manipulator adalah dua hal yang berbeda. Masalahnya adalah bahwa manipulator "sosis" pada titik target, ada yang disebut "serge bounce". Kami mencoba berbagai koefisien regulator, tetapi semuanya sia-sia.Penyebab masalah kami adalah gravitasi terkenal. Dalam posisi menggantung (ketika lengan diturunkan secara vertikal ke bawah), untuk mengatur 10 derajat pada sambungan bahu, diperlukan satu koefisien regulator, dan koefisien lainnya untuk mencapai penyimpangan yang sama pada posisi horizontal. Karena sistem tidak terlalu dinamis, maka untuk menentukan tingkat pengaruh gravitasi dan selanjutnya kompensasinya, kami menggunakan accelerometer tiga-sumbu yang biasa, yang memecahkan masalah kami. Keputusan ini tidak berpura-pura menjadi obat mujarab - itu hanya cara kami. Mungkin di antara pembaca artikel kami ada pengemudi listrik berpengalaman yang dapat memberi saran sesuatu.Berikut adalah tes video dari salah satu derajat bahu (ternyata, tingkat paling sulit dalam hal manajemen).Dan tentu saja, seluruh video dari manipulator:Pada akhirnya
Secara umum, kami puas dengan implementasi manipulator versi pertama. Kesalahan rata-rata dari semua "servs" bervariasi dalam kisaran 0,2-1 derajat (jangan melakukan operasi ini dengan manipulator ini). Saya tidak terlalu suka cengkeraman - terlalu berat (350 gram). Kemungkinan besar kita akan mengembangkan milik kita sendiri. Di masa depan, kami ingin meningkatkan akurasi semua derajat, mengulangi mekanisme pergelangan tangan - menempatkan servo "kebiasaan" kami di sana dan membuat sistem keamanan.Apa selanjutnya
Sekarang kami sedang menyelesaikan pekerjaan di kepala Oscar-a, yang akan dibahas dalam artikel berikutnya.Terima kasih atas perhatian anda! Semoga hari kalian menyenangkan!
Source: https://habr.com/ru/post/id401887/
All Articles