
Mustahil untuk dibangun ketika masyarakat mulai merawat halamannya. Sejujurnya, memotong rumput adalah suatu keharusan. Tapi kontrol gulma, pemangkasan, dan ekses lainnya tidak. Halaman yang indah adalah simbol status di pinggiran kota modern di seluruh dunia. Ketika alien datang kepada kita, mereka mungkin akan segera melihat betapa rapi halaman kita. Dan pencapaian peradaban ini menjadi mungkin dengan kedatangan mesin khusus untuk memotong rumput.
Mesin pemotong rumput pertama adalah perwakilan dari ternak. Masalahnya adalah bahwa sangat sulit untuk melayani mereka, mereka memotong rumput secara tidak merata, itulah sebabnya mereka tidak berakar dalam keluarga yang berjuang untuk halaman rumput yang sempurna. Jika Anda ingat aroma tidak enak dari produk sampingan dari aktivitas mereka, menjadi jelas mengapa hewan-hewan itu tidak lagi populer dan secara bertahap pindah ke halaman belakang. Untuk mempertahankan penampilan halaman yang bergengsi, orang mulai mencari cara lain.
Mesin pemotong rumput mekanik pertama kali ditemukan pada tahun 1830 oleh Edwin Badding, tidak diragukan lagi untuk melampaui tetangganya yang menggunakan kepang. Mesin pemotong rumputnya sangat mirip dengan opsi saat ini, di mana bilah-bilahnya dipasang pada sebuah silinder yang berputar ketika mesin pemotong bergerak maju. Badding diberi hak paten untuk perangkat itu, yang sangat mengecewakan tetangganya - kebanyakan dari mereka harus membeli mesin pemotong pemula, karena hampir semua membeli yang sama untuk diri mereka sendiri, meskipun mereka tidak diperlukan.
Pada 1930-an, Perang Dingin antara Badding dan tetangganya telah menyebar ke hampir setiap halaman planet ini, dan tidak ada akhir yang terlihat. Jika Anda kembali ke zaman kita, maka pada tahun 2014 saja, penjualan $ 10 miliar dibuat di kebun dan pasar perawatan rumput .. Kemajuan teknologi telah menyebabkan munculnya mesin yang sangat canggih yang mengunyah rumput. Untuk area kecil, kebanyakan orang menggunakan mesin pemotong dengan mesin pembakaran internal satu silinder, yang harus Anda dorong di depan Anda. Banyak mesin pemotong dilengkapi dengan tas kain untuk mengumpulkan sisa yang dibenci semua orang saat mereka berangsur-angsur penuh, membuat mesin pemotong lebih sulit didorong. Tapi karena tetangga menggunakannya, kita juga harus. Bagian yang lebih besar membutuhkan mesin pemotong mahal untuk digunakan. Banyak pemilik mesin pemotong rumput seperti itu dapat membanggakan di pesta terdekat bahwa mereka memiliki transmisi hidrostatik, meskipun mereka tidak tahu apa itu.
Kami peretas tidak lebih baik dari mereka. Kami, seperti semua orang, juga memiliki rumput. Tapi, tidak seperti orang lain, kami memiliki setrika solder. Dan kita tahu cara menggunakannya. Saya mengusulkan untuk merusak fondasi perang tetangga seperti yang dilakukan Badding 85 tahun yang lalu. Dapatkan mikrokontroler favorit Anda, dan untuk bekerja!
Mesin Pemotong Rumput Autonomous Sungguh - Angkat Tangan Anda
Pertama, kita akan berurusan dengan ini. "Mesin pemotong rumput robot" bodoh ini yang
menggunakan pembatas kawat dan memotong rumput, bergerak di sepanjang jalur acak , kita tidak perlu. Jelas bagi peretas mana pun yang menyandang gelar ini bahwa pemotong rumput membutuhkan sistem penentuan posisi. "Kenapa?" - kamu bertanya. Tonton video apa pun tentang bagaimana hal seperti itu terjadi, seperti serangga yang tertiup angin, dan Anda berkata pada diri sendiri: "Anda tahu, benda ini akan bekerja lebih baik jika Anda tahu di mana itu." Itu yang akan kita lakukan. Untuk membuat mesin pemotong rumput otonom, kita membutuhkan sistem penentuan posisi. Jika kita dapat menemukan koordinat XY dari mesin pemotong rumput, maka otomatisasi akan sangat disederhanakan.
Tentu saja, ada cara lain untuk mencapai otonomi, dan saya sarankan Anda mendiskusikannya di komentar, tetapi dalam artikel ini saya akan menjelaskan otonomi melalui penentuan posisi. Secara khusus, melalui penentuan posisi satelit.
GPS, RTK, dan DGPS
Hal pertama yang terlintas dalam pikiran untuk memecahkan masalah mendapatkan koordinat di luar gedung adalah GPS. Hal kedua yang terlintas dalam pikiran setelah sekitar 25 ms adalah keakuratan sistem ini. Semua orang tahu bahwa keakuratan GPS berkisar dari 15 meter. Dengan mesin pemotong rumput otonom, ini tidak akan berhasil. Tetapi ada dua opsi lagi:
RTK dan
DGPS . Dan metode ini sudah memiliki akurasi yang kita butuhkan.
Standar GPS
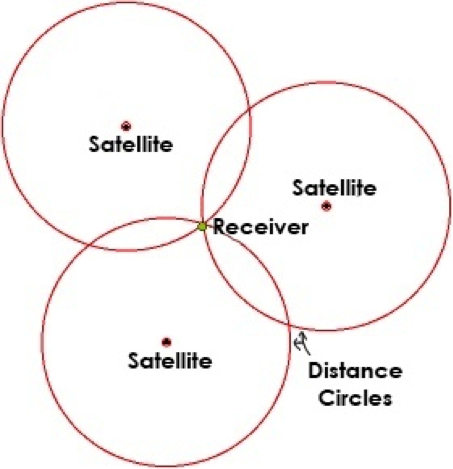
Sebelum terjun ke sistem lain, pertimbangkan GPS yang sederhana dan familier. GPS di ponsel mengukur jarak dari itu ke setidaknya tiga satelit. Ini memungkinkan dia menemukan posisinya dengan
trilateration (jangan dikacaukan dengan triangulasi). Secara alami, keakuratannya tergantung pada keakuratan mengukur jarak ke satelit. Jarak ini ditentukan melalui cap waktu yang ditentukan dengan keakuratan jam atom yang berasal dari satelit. Penerima hanya mengambil perbedaan antara waktu transmisi dan waktu penerima, dan mengalikannya dengan kecepatan cahaya untuk mendapatkan jarak dari itu ke satelit.
Selain cap waktu, satelit mentransmisikan lokasinya. Berbekal jarak ke satelit dan posisinya, penerima, pada kenyataannya, mengetahui jari-jari lingkaran di pusat dimana satelit berada, dan pada perimeter - penerima. Dan ketika tiga lingkaran ini bersatu - padu! Anda mendapatkan lokasi Anda menggunakan trilateration.
Beberapa hal membatasi keakuratan suatu metode; salah satu yang utama adalah suasananya. Ionosfer dapat menunda sinyal, yang mengarah ke masalah. Semakin besar ketebalan atmosfer untuk mengatasi sinyal, semakin besar efek ini. Oleh karena itu, sinyal yang berasal dari satelit di atas cakrawala lebih rentan terhadap distorsi daripada sinyal dari satelit di atas kepala. Gangguan ini terus berubah dan karena itu ada kesalahan penentuan posisi yang tidak dapat dipulihkan - hingga 10 meter.
RTK dan GPS diferensial
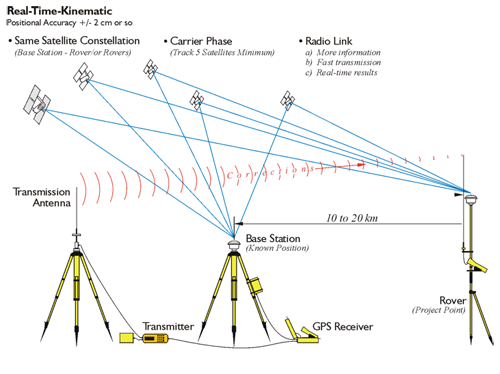
Sekarang, mengetahui skema operasi GPS dan batasan mendasarnya, kita dapat memahami cara menghilangkannya dan meningkatkan akurasi pemosisian. Ini dapat dilakukan dengan memasukkan penerima tetap kedua dalam sirkuit. Dia tidak bergerak, dan lokasinya diketahui pasti. Penerima seluler yang perlu tahu lokasinya harus cukup dekat dengan yang diperbaiki sehingga kedua penerima ini dapat membandingkan sinyal dari satelit GPS yang sama, dan kemudian membicarakannya.
Penerima tetap membandingkan sinyal GPS yang diterima oleh dirinya dan penerima ponsel. Karena penerima tetap sudah tahu lokasinya, ia dapat menangkap kesalahan dalam sinyal dan mengirimkan koreksi ke penerima seluler. Ini adalah cara kinematika aktual (RTK) dan sistem GPS diferensial bekerja.
GPS diferensial dapat mencapai akurasi hingga 10 cm, sementara RTK memperkirakan bagian analog dari sinyal bersama dengan digital, dan karenanya mencapai akurasi 2 cm, yang cukup akurat untuk mesin pemotong rumput otonom.
Opsi Pasar Gratis
Beberapa jenis peralatan yang tersedia dijual untuk penentuan posisi yang tepat. Mereka tidak murah, tetapi tidak terlalu berat bagi mereka yang ingin berhasil dalam proyek ini. Sistem termurah yang kami temukan adalah
REACH RTK , harganya $ 570, tetapi semua set terjual dengan sangat cepat setelah mereka mulai dijual. Ada juga
Piksi dari Swift Navigation, opsi yang lebih mahal yang
harganya $ 1.000. Jika Anda tahu opsi lain, silakan laporkan dalam komentar.
Menggunakan RTK GPS untuk mesin pemotong rumput mandiri sekarang tersedia untuk Anda atau tim Anda. Jika Anda tahu di mana tepatnya mesin pemotong Anda berada dalam waktu nyata, maka penulisan kode dan masalah teknik mesin diselesaikan secara langsung. Mengapa mereka tidak memutuskan? Tunggu apa lagi
Mesin pemotong CNC
Bayangkan apa yang terjadi jika Anda memotong mesin pemotong rumput Anda dengan
kode-G . Jika Anda memasang pisau on / off jarak jauh, maka alih-alih memotong rumput, Anda dapat mengontrol mesin pemotong dari jarak jauh.
Gambar yang saya buat masuk akal di ruang besar di mana mesin pemotong robot tanpa kabel kecil tidak begitu efektif. Jika area terlalu besar, akan sulit untuk menginstal perimeter di sekitarnya, dan ini membuat opsi GPS lebih dapat diterima (meskipun sinyal perimeter ini dapat
dipalsukan , yang memungkinkan kita untuk menambahkan GPS ke mesin pemotong robot jadi).
Dari sudut pandang konsumen, untuk memasuki pasar rumput skala besar, Anda harus menyelesaikan masalah kecil, misalnya, keamanan, menghindari rintangan (tungkai yang jatuh, manusia, ternak), melacak ketinggian bahan bakar, dll. Namun bagi peretas, konsep ini terlalu menarik untuk dielakkan. Kami senang mendengar tentang petualangan Anda dengan mesin pemotong rumput otomatis, dan berharap suatu hari nanti melihat roger riang berukuran setengah hektar memotong rumput.