Halo semuanya. Hari ini kita akan berbicara tentang kepala robot promosi Oscar. Seringkali, orang tertarik untuk berkomunikasi dengan robot seolah-olah mereka adalah jenis mereka sendiri: melihat wajah dan mencari respons emosional selama dialog. Karena itu, kepala robot promosi kami harus menjadi salah satu elemen utama yang menarik perhatian manusia.
Agar kepala benar-benar “hidup kembali”, kami mengidentifikasi persyaratan berikut:
- Kepala harus memiliki dua derajat kebebasan: kemiringan dan rotasi
- Harus ada kepala pelacakan lawan bicara
- Mata robot harus merespon lawan bicara
Secara struktural, kepala dibagi menjadi dua bagian:
Desain kepala
Pertama-tama, kami mulai dengan desain kepala untuk memahami apa yang akan menjadi faktor bentuk dan bagaimana menempatkan semua yang Anda inginkan di kepala. Secara umum, proses ini berulang dan kadang-kadang sangat sulit, terutama untuk insinyur yang sebelumnya hanya merancang roda gigi.
Setelah beberapa iterasi, kami mendapat sketsa, yang kira-kira memperhitungkan lokasi servos dan mekanisme mata.
Leher
Kepala robot dilengkapi dengan dua derajat kebebasan: memiringkan dan memutar kepala. Dasar dari desain leher adalah profil dan tulang rusuk, yang telah kita gunakan dalam
manipulator .
Untuk mengontrol derajat kebebasan, server khusus kami digunakan. Kami akan memutar kepala melalui kecepatan, mis. kecepatan putaran kepala akan tergantung pada posisi dalam bingkai orang yang dilacak, karena server dapat mengontrol kecepatan. Semakin jauh wajah dari pusat, semakin cepat kepala akan berputar. Saat Anda mendekati pusat, kecepatan akan menurun ke nol. Dengan demikian, Anda mendapatkan rotasi kepala yang cukup mulus.
Mata
Di sini, kami juga tidak ingin menghabiskan banyak waktu, jadi kami memutuskan untuk mencari proyek mata animatronik yang ada, ada baiknya proyek-proyek seperti itu adalah gerobak dan gerobak kecil. Dari yang kami temukan, saya terutama ingin mencatat
satu proyek .
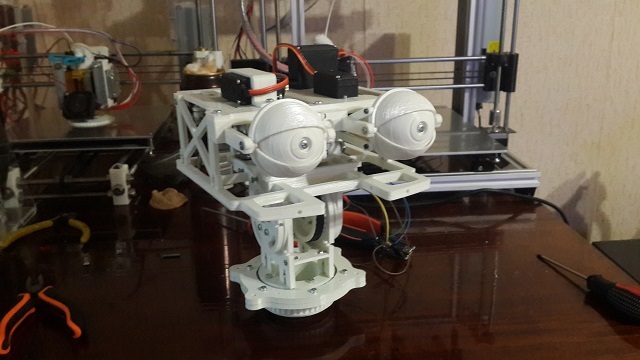
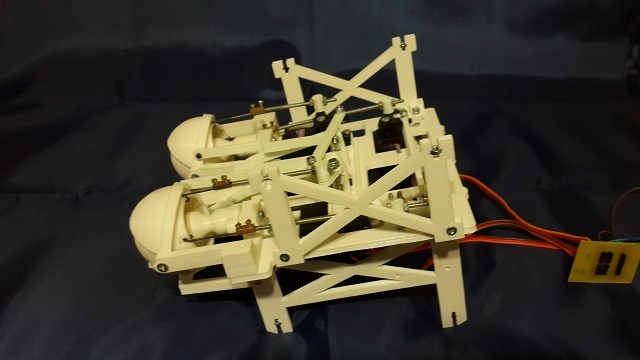
Kami menganggapnya sebagai dasar. Dan semuanya baik-baik saja sampai kami mulai mencoba menggabungkan mekanisme mata, desain kepala yang ada, dan mekanisme leher. Pada akhirnya, saya harus mengembangkan "sepeda" sendiri. Hasilnya adalah desain mata seperti itu:

Mata diberdayakan oleh arduino_nano. Untuk mengontrol pelayan, mereka mengambil
perpustakaan standar. Serva diberi daya dari sumber daya yang terpisah, Arduino tidak mampu memberikan arus yang cukup. Pada awalnya ada masalah kecil dengan "mental" yang merusak keseluruhan estetika. Kemudian mereka menemukan alasannya - regulator daya berkualitas rendah, menggantinya dengan yang
serupa lainnya - masalahnya hilang. Dan ada satu hal lagi, hobi servos tidak suka kabel panjang, jadi kami menghapus panjang ekstra antara servos dan controller. Gerakan mata diimplementasikan dengan mengatur sudut rotasi servo.
Sebagai ujian, kita akan menggunakan orang kedua dari negara kita - Dmitry Anatolyevich Medvedev. Tiba-tiba, untuk kerja keras, hibah untuk pengembangan proyek akan "jatuh" di kepalanya.
Bagaimana cara kerjanya?
Semua ini bekerja cukup sederhana, karena kepala dan mata harus menanggapi seseorang, maka sumber informasinya akan sama bagi mereka - kamera video yang terletak di kepala robot. Kamera bekas dari Raspberry. Ngomong-ngomong, di sini kami membuat cacat kecil - kami mengambil kamera dengan sudut pandang kecil. Selama pengujian, menjadi jelas bahwa perlu untuk menempatkan kamera sudut lebar - maka ekspresi wajah dapat dibuat lebih hidup, karena akan mungkin untuk berpaling pada sudut yang lebih besar.
Raspberry Pi 3 digunakan sebagai prosesor gambar. Saya ingin mengatakan bahwa Malinka mengatasi tugas ini dengan percaya diri, tetapi itu benar pada resolusi rendah, sambil memberikan beban yang nyata pada keempat core.
Deteksi wajah dilakukan oleh instrumen klasik - kaskade Haar. Apalagi frekuensi deteksi wajah adalah 9 - 12 FPS.
Dengan analogi dengan seseorang, robot pertama kali melihat lawan bicaranya, dan kemudian menoleh padanya. Meskipun kecepatan rotasi head yang relatif tinggi tersedia, kami memperlambatnya. Membawa kecepatan rotasi kepala sesuai dengan kecepatan mendeteksi wajah, kami mendapatkan gerakan yang halus dan anggun.
Kami puas dengan kepala kami yang berkumpul. Apa yang kamu pikirkan Apa lagi yang bisa saya tambahkan atau lakukan?
Apa selanjutnya
Sekarang kami sedang menyelesaikan perakitan manipulator kedua, setelah itu kami akan beralih ke pembuatan platform dengan bagasi. Dan semua ini perlu diekspos di gedung yang layak. Mari berharap di artikel selanjutnya kita akan mempresentasikan gagasan kita dengan penuh kemuliaan.
Anda tinggal di sini, semua yang terbaik untuk Anda, suasana hati dan kesehatan yang baik!