Secara historis, penggunaan robot dimulai dengan produksi. Pertama, robot diciptakan untuk melakukan operasi individu, kemudian lokasi produksi robot dan, akhirnya, sistem produksi yang fleksibel. Pengalaman operasi mereka memungkinkan kami untuk menyimpulkan bahwa dalam waktu dekat volume produk dapat meningkat beberapa kali tanpa meningkatkan biaya tenaga kerja manusia. Tetapi pencapaian kemajuan ilmiah dan teknologi yang tidak diragukan ini memunculkan tidak hanya harapan akan kelimpahan yang telah lama ditunggu-tunggu, lenyapnya kemiskinan, dll., Tetapi juga kekhawatiran tertentu.
 Produksi otomatis [1]
Produksi otomatis [1]Bahkan, tidak ada yang keluar dari ketiadaan. Jika konsumsi tumbuh beberapa kali, maka jumlah sumber daya yang sama akan dibutuhkan. Dan lingkungan sudah di bawah tekanan kritis dari umat manusia. Menurut statistik, sudah sekarang satu orang menghasilkan sekitar 3-5 liter sampah per hari, yang mencapai 120 liter per bulan, dan 1.500 liter per tahun [9, kesalahan sumber diperbaiki karena pengamatan dragonnur]. Bahkan menggandakan produksi berarti memicu bencana lingkungan. Ternyata robot agak mirip dengan senjata nuklir - dengan potensi besar (dalam hal senjata destruktif, untuk robot kreatif) penggunaan skala penuh mereka tidak mungkin karena konsekuensi tragis umum.
 Mengambil gambar dari film "Landfill", 2014 [2]
Mengambil gambar dari film "Landfill", 2014 [2]Untungnya, robot bukanlah bom termonuklir dan ada jalan keluar dari kontradiksi antara kemungkinan dan konsekuensi. Pintu keluar ini adalah robot itu sendiri, disesuaikan untuk pembuangan limbah produksi dan konsumsi. Menurut prinsip lama, suka diperlakukan seperti. Jika kita menggandakan produksi dan pada saat yang sama menciptakan sistem robotik yang akan memanfaatkan dan mengubah 50% limbah menjadi bahan baku atau energi sekunder, maka beban lingkungan tidak akan berubah. Jika tingkat pemanfaatan mencapai 67%, maka produksi dapat naik tiga kali lipat. Dan sebagainya.
Secara alami, ini adalah skema yang sangat kasar. Dalam praktiknya, penting untuk memperhitungkan metode dan volume pembuangan khusus, biaya pembuatan peralatan tambahan, dan banyak faktor lainnya. Tetapi jelas bahwa peningkatan konsumsi berkaitan erat dengan tingkat pengolahan limbah. Dan karena masyarakat dengan tingkat konsumsi tinggi tidak terlalu siap untuk melakukan pekerjaan kasar, robot harus bekerja keras. Dan mereka sudah mulai bekerja.
Tugas pembuangan limbah dapat dibagi menjadi tiga subtugas:
- pengumpulan sampah;
- penyortiran mereka;
- daur ulang limbah.
Mari kita mulai dengan yang pertama. Sekarang Anda tidak akan mengejutkan siapa pun dengan penyedot debu robot atau robot untuk mencuci jendela. Tapi ini adalah robot paling sederhana untuk mengumpulkan sampah. Tetapi, tentu saja, kemampuan mereka sangat terbatas, dan limbah yang sesuai - terutama debu rumah tangga dan jalan - tidak menarik dari sudut pandang pembuangan lebih lanjut.
 IClebo Pop Robot Vacuum Cleaner [3]
IClebo Pop Robot Vacuum Cleaner [3] Robot pencuci jendela Windoro WCR-I001 [4]
Robot pencuci jendela Windoro WCR-I001 [4]Tapi keranjang sampah "berkeliaran" sudah jauh lebih efektif daripada yang biasa. Di laboratorium untuk pengembangan interaksi dan komunikasi Universitas Teknologi Jepang di Toyohashi, sebuah bin wheelbase kecil telah dibuat. Ini disebut Kotak Sampah Sosial (STB). Robot ini dilengkapi dengan mikroprosesor, kamera video dan speaker, serta sensor inframerah dan sensor jarak.
 Kotak Sampah Sosial [5]
Kotak Sampah Sosial [5]Robot memulai aktivitasnya yang penuh semangat dengan menentukan tempat di mana orang hadir saat ini. Ini terjadi dengan menggunakan sensor inframerah yang merespons panas tubuh mereka. Sensor jarak bertanggung jawab atas keamanan memindahkan robot di antara orang-orang. Untuk mencari sampah itu sendiri, STB menggunakan kamera terintegrasi dalam kombinasi dengan algoritma pengenalan objek.
Ketika robot menemukan sampah, ia mulai melakukan "gerakan tubuh" aktif dan memancarkan sinyal suara. Karena itu, ia “meminta” orang untuk mengambil sampah dan membuangnya ke dalam wadah.
Sensor inframerah yang terletak di bagian atas ember akan memberi tahu Anda jika sampah benar-benar sampai di tempat seharusnya. Robot bahkan dapat sedikit memiringkan ember ke segala arah untuk membuatnya lebih mudah bagi seseorang untuk menyelesaikan tugasnya. Secara umum, kami memiliki kerja sama mesin manusia yang aktif dalam melestarikan lingkungan. Selain itu, robot tidak hanya bertindak sebagai pengumpul sampah, tetapi juga berfungsi sebagai jam alarm bagi hati nurani pecinta untuk membuang sampah di mana saja.
Tapi sama seperti laut tidak bisa diambil, jadi semua sampah tidak bisa dikumpulkan dalam keranjang kecil. Untuk ini, dibutuhkan unit yang lebih kuat. Misalnya, yang dikembangkan dan diuji dalam kerangka proyek DustBot (www.dustbot.org) untuk mengembangkan teknologi untuk pembersihan robot dan pengumpulan sampah pada skala kota kecil. Banyak ahli dari Italia, Spanyol, Inggris, Swiss dan Swedia terlibat di dalamnya, namun, peran utama adalah milik para peneliti dari Sekolah Tinggi St. Anne (Scuola Superiore Sant'Anna), yang berlokasi di Pisa. Proyek ini didukung secara finansial oleh Komisi Eropa.
Robot pertama, yang disebut DustClean, adalah penyapu otonom yang dilengkapi dengan sikat berputar dan penyedot debu. DustClean membersihkan jalan-jalan, berkeliling kota pada rute tertentu, sambil berhenti di depan pejalan kaki dan menghindari rintangan.
 Robot DustClean [6]
Robot DustClean [6]Robot kedua, bernama DustCart, bisa disebut pemulung. Dia mengumpulkan kantong sampah dari penduduk kota dan membawanya untuk didaur ulang. Tinggi robot adalah 150 cm, berat 70 kg, kecepatan 1 m / s. Satu pengisian baterai cukup untuk 16 km.
 Robot DustCart [6]
Robot DustCart [6]Agar truk sampah robot sampai di tujuannya, truk itu harus dipanggil melalui telepon. Setelah robot tiba, klien memasukkan kode pribadinya melalui layar pada kasus DustCart. Ini perlu, karena di masa depan sistem seperti itu seharusnya dibayar. Pada saat yang sama, seseorang dapat memilih rute yang berbeda untuk pengangkutan sampah lebih lanjut, serta jenis sampah (sampah organik, gelas, plastik atau kertas). Setelah manipulasi selesai, klien menempatkan kantong sampah di lubang pembuka robot, dan ia pergi ke titik pengumpulan limbah, di mana ia menurunkan tas.
Robot dari proyek DustBot tidak dapat sepenuhnya menyelesaikan masalah pengumpulan sampah. Tujuannya lebih sederhana - bekerja di tempat-tempat di mana peralatan pembersih konvensional tidak cocok. Dan ada banyak tempat seperti itu di kota-kota Eropa. Selain itu, robot dilengkapi dengan sensor yang menentukan kandungan benzena, nitrogen oksida, karbon dan sulfur di udara, dan sensor suhu.
Tes lapangan DastBusts diadakan di kota Italia Pechcholi. Komune Pechcholi adalah pemukiman pertama di dunia di mana jalur terpisah telah dialokasikan di jalan untuk pergerakan robot.
 DustCart terburu-buru dalam pemilihan untuk porsi sampah selanjutnya [7]
DustCart terburu-buru dalam pemilihan untuk porsi sampah selanjutnya [7]Berikutnya pada skala setelah DustBot akan menjadi robot ROARY yang ditunjukkan oleh Volvo. Pengembangan dilakukan bersamaan dengan spesialis dari Chalmers University of Technology, Malardalen University dan University of Pennsylvania. Proyek ini menunjukkan kemungkinan kerja bersama dua robot, yang di masa depan akan membantu memfasilitasi pekerjaan sehari-hari pekerja perkotaan.
 Karya-karya ROARY, sebuah drone pengintai mengintip di suatu tempat di dekatnya [8]
Karya-karya ROARY, sebuah drone pengintai mengintip di suatu tempat di dekatnya [8]ROARY diangkut dengan platform khusus yang dipasang di belakang truk sampah. Truk sampah itu sendiri hampir tidak terlihat di sebelah kanan, sehingga dapat memberikan kesan yang salah bahwa ROARY sepenuhnya otonom. Faktanya, otonominya jauh lebih rendah daripada DustBots.
Setelah tiba, operator mengaktifkan kendaraan udara tak berawak yang dipasang di atap mobil, setelah itu drone memindai lingkungan untuk mendeteksi wadah sampah. Sistem mentransmisikan data pada lokasi tangki ke robot, yang memuat wadah sampah ke platform khusus, kembali ke truk sampah dan mengangkat tangki, membersihkannya dari puing-puing. Secara keseluruhan, ROARY cocok untuk bagian yang paling sulit dan paling kotor dari pekerjaan pemulung.
Untuk menavigasi medan, ROARY menggunakan GPS dan lidar, yang memungkinkannya untuk menghindari tabrakan dengan rintangan. Dengan kamera bawaan, ROARY dapat mendeteksi objek yang terletak sangat dekat dengan truk sampah saat mengosongkan wadah, dan fungsi penghentian darurat otomatis akan memperingatkan kemungkinan konsekuensi yang tidak menyenangkan. Pematian darurat dapat digunakan oleh operator truk sampah.
Secara umum, dilihat dari ketiga sistem yang ditinjau, robot cukup mampu menangani pengumpulan sampah. Apalagi jika orang sedikit membantu mereka. Ini hanya adil - setiap orang harus membersihkan diri mereka sendiri. Tapi tidak ada yang wajib membersihkan setelah orang lain, apalagi mengambil limbah yang terkumpul selama bertahun-tahun, oleh siapa pun. Karena itu, Anda harus beralih ke robot lagi. Lebih khusus lagi, sistem ZenRobotics Recycler (ZRR) dikembangkan oleh perusahaan Finlandia ZenRobotics.
Saat ini, metodologi klasik untuk pra-pemilahan sampah dilakukan dalam beberapa tahap:
- Sortir logam / non-logam menggunakan elektromagnet yang kuat.
- Penyortiran berat / tidak berat dengan menghembuskan udara.
- Tahap manual.
Pada tahap ketiga, ada orang-orang di konveyor yang, dengan pengarahan dan keterampilan tertentu, memilah sampah. Setelah itu, limbah yang diletakkan di wadah yang berbeda dikirim ke pabrik khusus untuk didaur ulang atau biofuel. ZenRobotics memutuskan untuk menyelamatkan orang-orang dari pekerjaan kotor dan monoton dengan menciptakan teknologi robot khusus yang dapat menggabungkan ketiga tahap menjadi satu.
Benar, sejauh ini ini terutama tentang limbah konstruksi, dan lebih khusus tentang sisa-sisa gunung sampah setelah pembongkaran bangunan tua. ZRR terdiri dari 3 bagian utama. Pertama, ini adalah manipulator, yang merupakan robot industri standar. Kedua, ini adalah sensor untuk mengenali pecahan puing - kamera video dari berbagai jenis dan detektor logam. Sensor sudah diperbaiki. Ketiga, komputer industri. Dasar "intelijen" ZRR adalah perangkat lunak yang diperbarui secara berkala oleh perusahaan melalui Internet.
Perangkat ZRR jelas ditunjukkan pada gambar yang menggambarkan prototipe sistem industri lengkap saat ini. Limbah konstruksi dibawa di bawah blok sensor menggunakan konveyor. Sensor mengenali setiap fragmen sampah dan mengirimkan informasi tentang lokasinya pada konveyor, ukuran dan material - batu bata, kayu, tulangan, dll. Ke sistem kontrol manipulator.
 Prototipe saat ini ZRR [9]
Prototipe saat ini ZRR [9]Ketika fragmen mencapai area cakupan manipulator, hanya tinggal bergerak ke posisi yang sudah dihitung, buka gripper dengan mempertimbangkan ukuran fragmen, keluarkan fragmen dari conveyor dan lemparkan ke dalam wadah dengan fraksi yang sesuai.
Ada kemungkinan bahwa beberapa serpihan puing tidak akan dikenali secara andal oleh sensor. Dalam hal ini, manipulator tidak akan mengurutkannya secara acak. Fragmen yang tidak dikenali akan dikirim oleh conveyor ke koleksi khusus, dari mana mereka akan diumpankan lagi ke awal conveyor, di bawah sensor. Kemungkinan besar, dengan lokasi yang berbeda pada pita dan relatif satu sama lain, fragmen ini dapat dikenali dengan benar. Proses ini akan berlanjut sampai seluruh tumpukan sampah diuraikan menjadi pecahan.
Sistem ZRR komersial lebih dari tingkat prototipe, termasuk setidaknya dua manipulator dan wadah besar.
 Manipulasi ZRR sedang bekerja [10]
Manipulasi ZRR sedang bekerja [10] ZRR dalam versi komersial minimum [10]
ZRR dalam versi komersial minimum [10]Berdasarkan ZRR, sistem penyortiran multi-tahap dapat dibangun. Instalasi terpisah dalam sistem seperti itu bekerja berurutan - jika ada fragmen sampah yang dilewati oleh instalasi pertama, maka yang kedua kemungkinan besar akan mengatasinya.
Perangkat lunak ZRR dapat membuat keputusan independen dan belajar sendiri. Oleh karena itu, intervensi manusia dalam sistem minimal dan hanya diperlukan untuk kegagalan.
Dalam keadilan, perlu dicatat bahwa ZRR bukan satu-satunya solusi yang mungkin untuk memilah sampah tanpa partisipasi (atau dengan partisipasi minimal) seseorang. Jadi, perusahaan Jerman GUNTHER ENVIROTECH telah mengembangkan SPLITTER pemilahan tanaman khusus untuk memilah sampah kota. Instalasi ini tidak menggunakan sensor, manipulator dan perangkat lunak canggih. Semuanya diganti dengan auger dan poros dari bentuk khusus, yang memungkinkan Anda untuk membagi sampah menjadi 3 fraksi berdasarkan bentuk, ukuran dan berat.
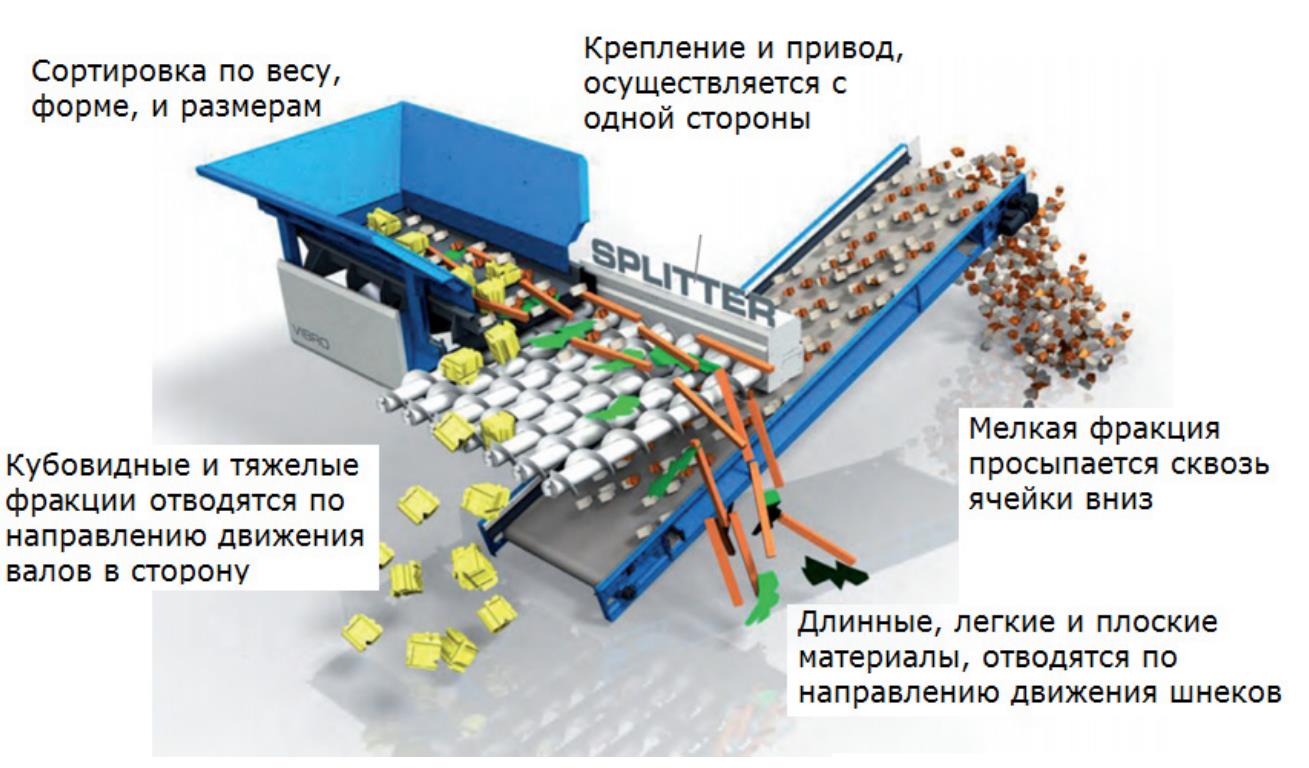 Instal SPLITTER [11]
Instal SPLITTER [11]Terlepas dari kesederhanaan dan keaslian desain, jelas bahwa SPLITTER hanya mampu melakukan pemisahan sampah secara kasar menjadi pecahan. Jika diperlukan penyortiran lebih lanjut, sistem tipe ZRR diperlukan. Dengan demikian, teknologi ini tidak begitu banyak bersaing sebagai saling melengkapi dalam menyelesaikan masalah yang kita atur di awal artikel - daur ulang limbah oleh setidaknya 2/3 menggunakan robot.
Dan kemudian ternyata, berbicara tentang pembuangan sampah pada 2/3, kami secara signifikan meremehkan kemampuan teknologi yang tersedia. Karena sistem sudah beroperasi, memungkinkan untuk menaikkan tingkat pemanfaatan menjadi 97%!
Pada awal 90-an, sekelompok ilmuwan Belanda memulai penelitian dan pengembangan teknologi baru, yang tugas utamanya adalah pengolahan limbah tanpa penyortiran awal, memperoleh bahan baku berkualitas tinggi (termasuk yang dimurnikan dari bahan beracun dan berbahaya), serta efektivitas biaya, profitabilitas dan, pada saat yang sama, keamanan lingkungan.
Pada tahun 2000, para ilmuwan mencapai tujuan mereka, menguji dan mematenkan apa yang disebut teknologi "3R", menggabungkan semua prinsip di atas [12]. Teknologi ini dioperasikan oleh EPC Group.
Pabrik daur ulang sampah yang dibangun berdasarkan prinsip 3R dapat memproses:
- limbah rumah tangga;
- sampah besar yang tidak robek (furnitur, bahan bangunan, dll.);
- limbah organik;
- isi TPA;
- mobil dan bagian truk, baterai, ban yang belum dirakit;
- peralatan elektronik dan listrik (TV, lemari es, dll.);
- limbah medis;
- limbah industri;
- baterai, termometer, lampu
dan masih banyak lagi.
Tergantung pada tugas, pabrik dilengkapi dengan unit independen yang diperlukan.
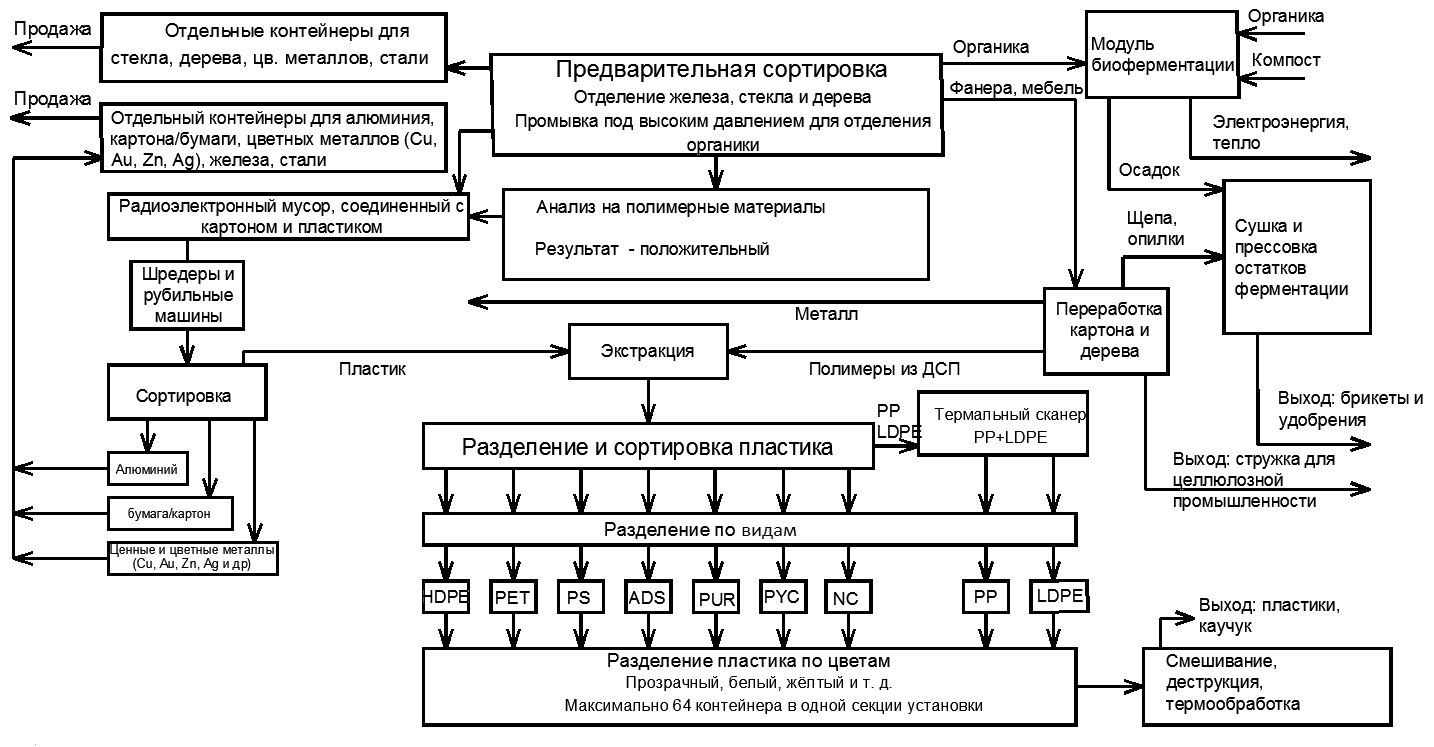 Skema umum pengolahan sampah menggunakan teknologi "3R" [12]
Skema umum pengolahan sampah menggunakan teknologi "3R" [12]Pada tahap desain, dilakukan analisis limbah yang dimaksudkan untuk didaur ulang dalam sistem. Dengan demikian, komposisi kualitatif ditentukan untuk menghitung efektivitas dan pengembalian, yang dapat dijamin oleh produsen, serta keberadaan zat berbahaya atau radioaktif dalam komposisi mereka.
Berikut ini adalah proses umum untuk daur ulang di pabrik 3R.
- Limbah yang tidak disortir secara otomatis dipilah langsung ke pabrik. Analisis limbah tambahan sebelum pengiriman ke pabrik tidak diperlukan.
- Proses daur ulang dimulai dengan pemisahan komponen non-plastik, listrik dan elektronik. Selanjutnya, bahan magnet dipisahkan, demikian juga kayu, kaca. Semuanya dikemas dalam wadah untuk dijual atau diproses lebih lanjut. Pada tahap ini, integrasi ke dalam teknologi "3R" dari sistem tipe ZRR dimungkinkan untuk meningkatkan kualitas dan penyortiran otomatis sepenuhnya.
- Limbah sisa yang mengandung plastik dianalisis untuk kualitas dan tingkat erosi. Setelah itu, mereka pergi ke helikopter.
- Pemilahan kedua bahan yang sudah dihancurkan: logam, kertas, kardus dipisahkan dan siap dijual.
- Plastik dibersihkan dari produk residu di ekstraktor. Pewarna diisolasi dari bahan dan dapat digunakan kembali.
- Plastik diurutkan berdasarkan jenis - PET, PVC, HP, HDPE, MURNI, ABS, dll. Modul pemrosesan plastik mencakup hingga 64 wadah untuk pemisahan berbagai jenis plastik. Plastik dipisahkan menggunakan pemindai termal berdasarkan indeks leleh, karena masing-masing spesies memiliki suhu leleh sendiri.
- Plastik yang dibagi berdasarkan jenis selanjutnya disortir berdasarkan warna.
- Pencampuran dan pengepresan: plastik disiapkan untuk dijual dengan pertimbangan kemungkinan kebutuhan pelanggan.
- Fermentasi Gas - Bahan organik dikumpulkan untuk produksi biofuel.
- Berbagai jenis kayu diproses dan dibersihkan untuk digunakan lebih lanjut dalam industri pulp dan kertas.
- Residu mentah dari fermentasi gas dan serpihan dari kardus dan kayu dikirim ke blok briket, di mana massa dikeringkan, ditumbuk dan ditekan menjadi briket bahan bakar. Briket juga dapat digunakan di pertanian dan industri pertanian sebagai pupuk.
Perhatikan bahwa biogas dari unit fermentasi digunakan untuk menghasilkan energi. Dengan demikian, jumlah energi yang diterima tidak tergantung langsung pada persentase bahan organik dalam limbah yang diterima di pabrik, tetapi hanya pada waktu dan intensitas fermentasi. Oleh karena itu, pabrik dapat dibuat bukan sebagai konsumen, tetapi pemasok energi (termasuk untuk dirinya sendiri) dalam hampir semua kasus.
Berdasarkan perkiraan EPC Group, saat memproses 100 kg limbah, kami memperoleh 97 kg bahan baku jadi berkualitas tinggi (hasil dan kualitas bahan baku tergantung pada jenis limbah yang dikirim ke sistem), dan pengembalian proyek akan mencapai 30-50% per tahun.
Menggunakan teknologi 3R, beberapa pabrik daur ulang sampah telah dibangun, termasuk di Dusseldorf, Amsterdam dan Harlingen. Sebuah pabrik sedang dibangun di Jakarta.
Berikut ini adalah analisis komparatif dari pabrik yang dirancang di Jakarta dan pabrik yang ada [12].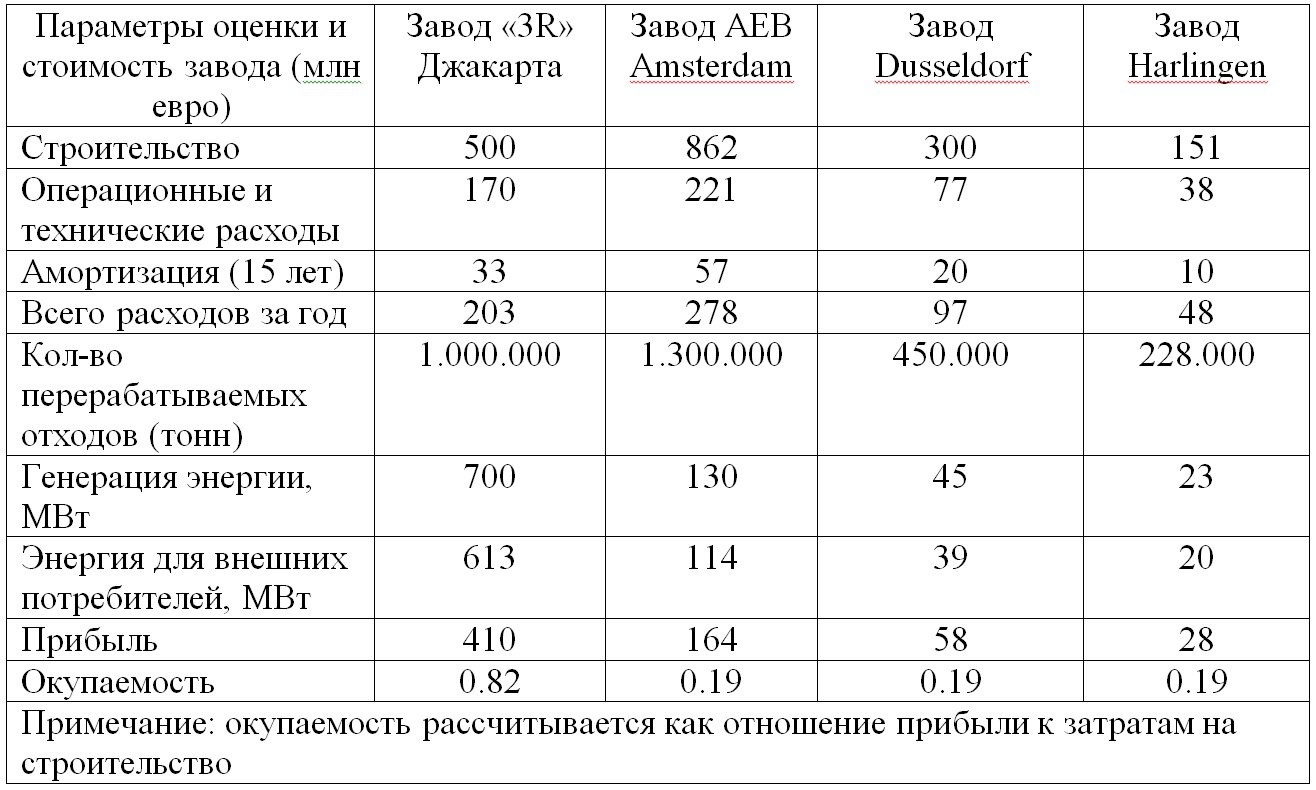 Seperti dapat dilihat dari tabel, semua pabrik teknologi 3R tidak hanya memproses sampah, tetapi juga merupakan sumber energi bagi konsumen eksternal.Untuk meringkas hal di atas, jelas bahwa proses pengumpulan, pemilahan dan pengolahan limbah dapat hampir sepenuhnya otomatis, dan didasarkan pada teknologi yang ada. Selain itu, pembuangan limbah otomatis dapat mendatangkan banyak keuntungan. Dari seseorang, sebenarnya, mereka hanya perlu membantu robot dalam pekerjaan mulia baru mereka, dan, bagaimanapun, tidak membuang bungkus es krim melewati wadah robot yang bergegas mengejar mereka. Kalau tidak, itu tidak akan berhasil.
Seperti dapat dilihat dari tabel, semua pabrik teknologi 3R tidak hanya memproses sampah, tetapi juga merupakan sumber energi bagi konsumen eksternal.Untuk meringkas hal di atas, jelas bahwa proses pengumpulan, pemilahan dan pengolahan limbah dapat hampir sepenuhnya otomatis, dan didasarkan pada teknologi yang ada. Selain itu, pembuangan limbah otomatis dapat mendatangkan banyak keuntungan. Dari seseorang, sebenarnya, mereka hanya perlu membantu robot dalam pekerjaan mulia baru mereka, dan, bagaimanapun, tidak membuang bungkus es krim melewati wadah robot yang bergegas mengejar mereka. Kalau tidak, itu tidak akan berhasil.