Prostesis bionik generasi masa lalu biasanya dikontrol dengan bantuan sinyal myoelectric, yang timbul sebagai akibat kontraksi otot tangan manusia. Mengelola prostesis seperti itu tidak mudah: ia membutuhkan konsentrasi tertentu, dan efektivitas tindakan yang berhasil menyisakan banyak yang diinginkan. Tidak mudah melakukan apa yang Anda inginkan pertama kali. Dalam hal akurasi tindakan, protesa semacam itu jauh dari tindakan "intuitif" dari tangan nyata yang hidup.
Dalam beberapa tahun terakhir, para peneliti telah berfokus terutama pada keakuratan pengenalan sinyal-sinyal myoelectric, dan keakuratan pengenalan gerakan jari-jari individu telah mencapai 90%. Tetapi karena sejumlah alasan teknis, penggunaan prostesis "pintar" secara masif sangat terbatas.
Perkembangan baru insinyur dari University of Newcastle (UK) menawarkan pendekatan yang berbeda secara mendasar. Sebuah tangan yang dilengkapi dengan kamera video mengenali sebuah objek di depannya - dan menentukan cara terbaik untuk meraihnya. Ia bertindak secara otomatis dan hampir secara instan, tanpa usaha tambahan dari manusia. Padahal, tangan bionik memiliki visi sendiri.
Sebelumnya, para ilmuwan bereksperimen dengan kamera stereo dan berbagai algoritma pengenalan objek. Secara paralel, model manipulator baru untuk robot diciptakan - di sana, teknologi visi komputer sangat mirip dengan prostesis bionik untuk manusia. Itu di bidang robotika bahwa teknologi yang paling menjanjikan dari visi mesin dan pembelajaran mendalam diuji.
Insinyur dari University of Newcastle menggunakan perkembangan pendahulunya ini dan mengarahkan sistem visi mesin untuk mengenali
jenis penangkapan untuk objek dari berbagai jenis, dan tidak didasarkan pada pengukuran spesifik ukurannya. Yaitu, objek setelah pelatihan jaringan saraf diklasifikasikan secara tepat berdasarkan jenis tangkapan, dan bukan berdasarkan jenis atau kategori objek. Para penulis percaya bahwa karena pendekatan baru yang fundamental, mereka mampu secara signifikan meningkatkan kecepatan sistem, karena mengabaikan detail yang tidak perlu.
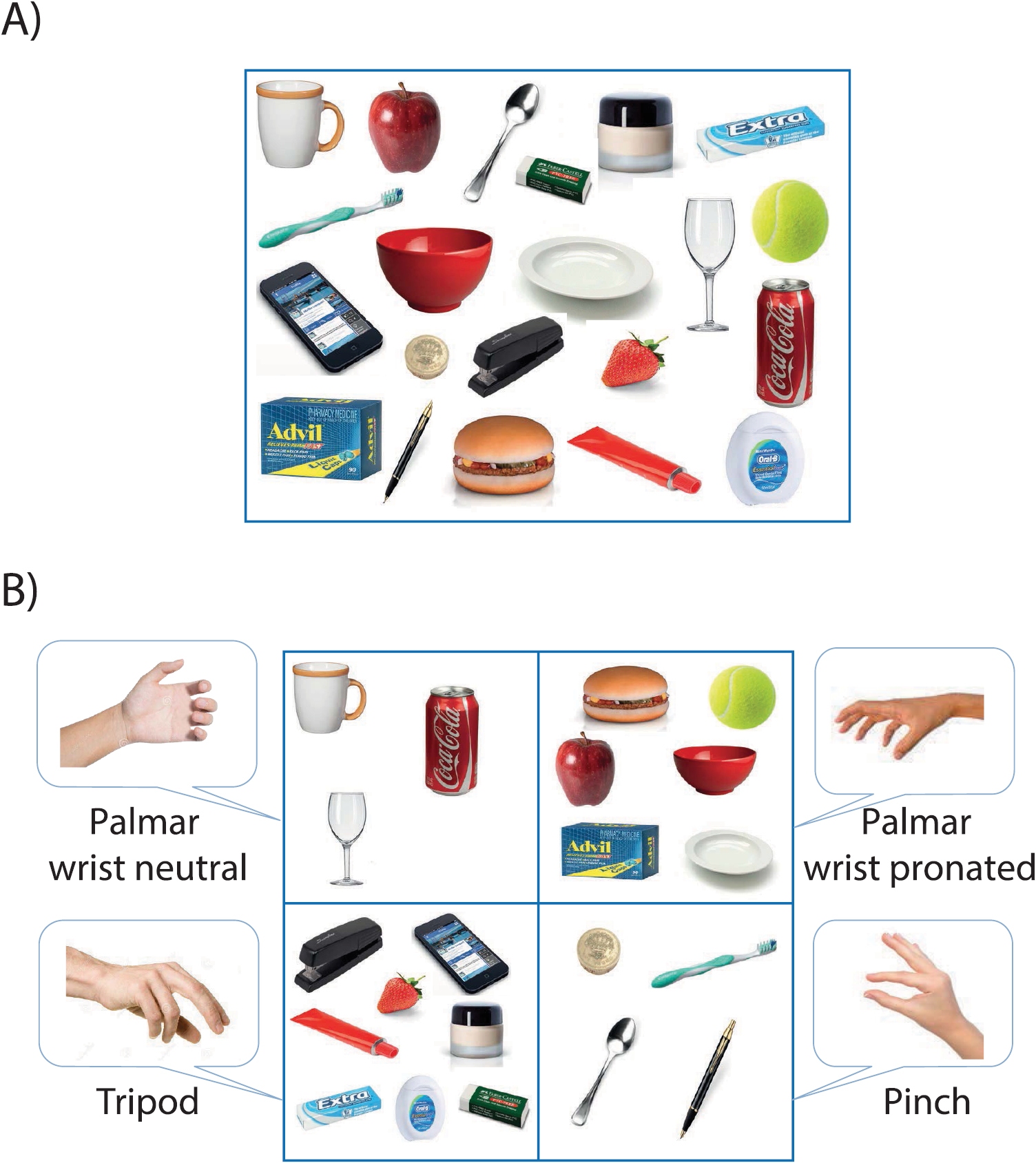 Sebagai perbandingan: klasifikasi berdasarkan kategori objek (di atas) atau oleh salah satu dari empat tipe tangkapan (di bawah)
Sebagai perbandingan: klasifikasi berdasarkan kategori objek (di atas) atau oleh salah satu dari empat tipe tangkapan (di bawah)Jaringan saraf convolutional digunakan untuk melatih sistem. Ternyata arsitekturnya sangat cocok untuk jenis tugas ini, yaitu untuk protesa bionik tangan. Sebagai contoh, metode lain dari penglihatan mesin mengalami masalah ketika mereka menemukan benda-benda yang tidak termasuk dalam kategori yang dikenal. Tetapi identifikasi objek yang tidak diketahui adalah salah satu kualitas paling penting dari prostesis bionik dengan visi mesin. Oleh karena itu, jaringan saraf convolutional sangat cocok untuk tugas seperti itu.
Sistem ini dilatih di
bank gambar Amsterdam , di mana sejumlah besar objek rumah hadir.
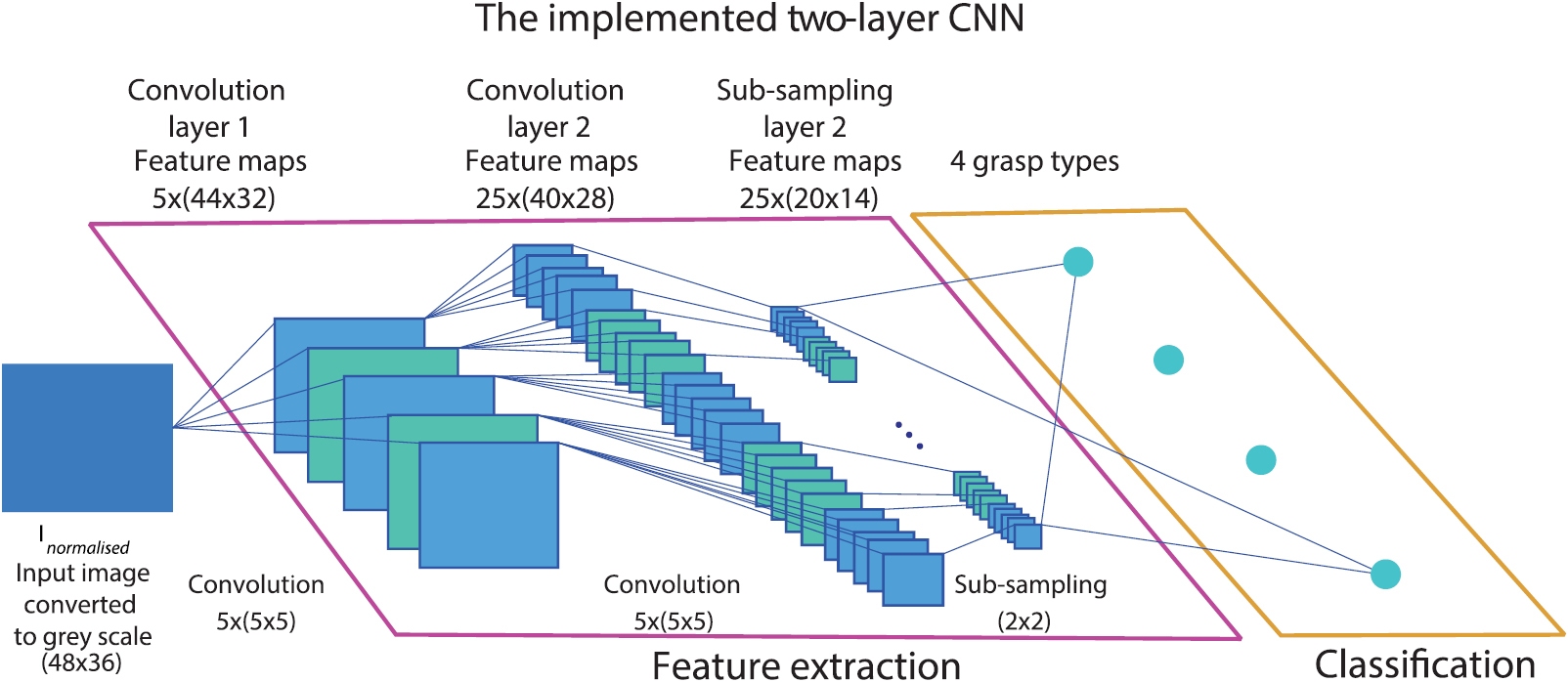
Arsitektur jaringan saraf convolutional dua lapis untuk ekstraksi fitur dan klasifikasi ditunjukkan pada ilustrasi di bawah ini.
Dalam tes pada pasien nyata dengan prostesis, sistem diuji pada 8 objek diketahui dan 16 tidak diketahui dalam posisi acak. Hasil untuk dua sukarelawan ditunjukkan dalam grafik di sebelah kiri dan kanan. Dengan mempertimbangkan kesalahan yang diizinkan, keakuratan pengakuan dan penangkapan objek adalah 88% dan 87% untuk sukarelawan pertama dan kedua, masing-masing.
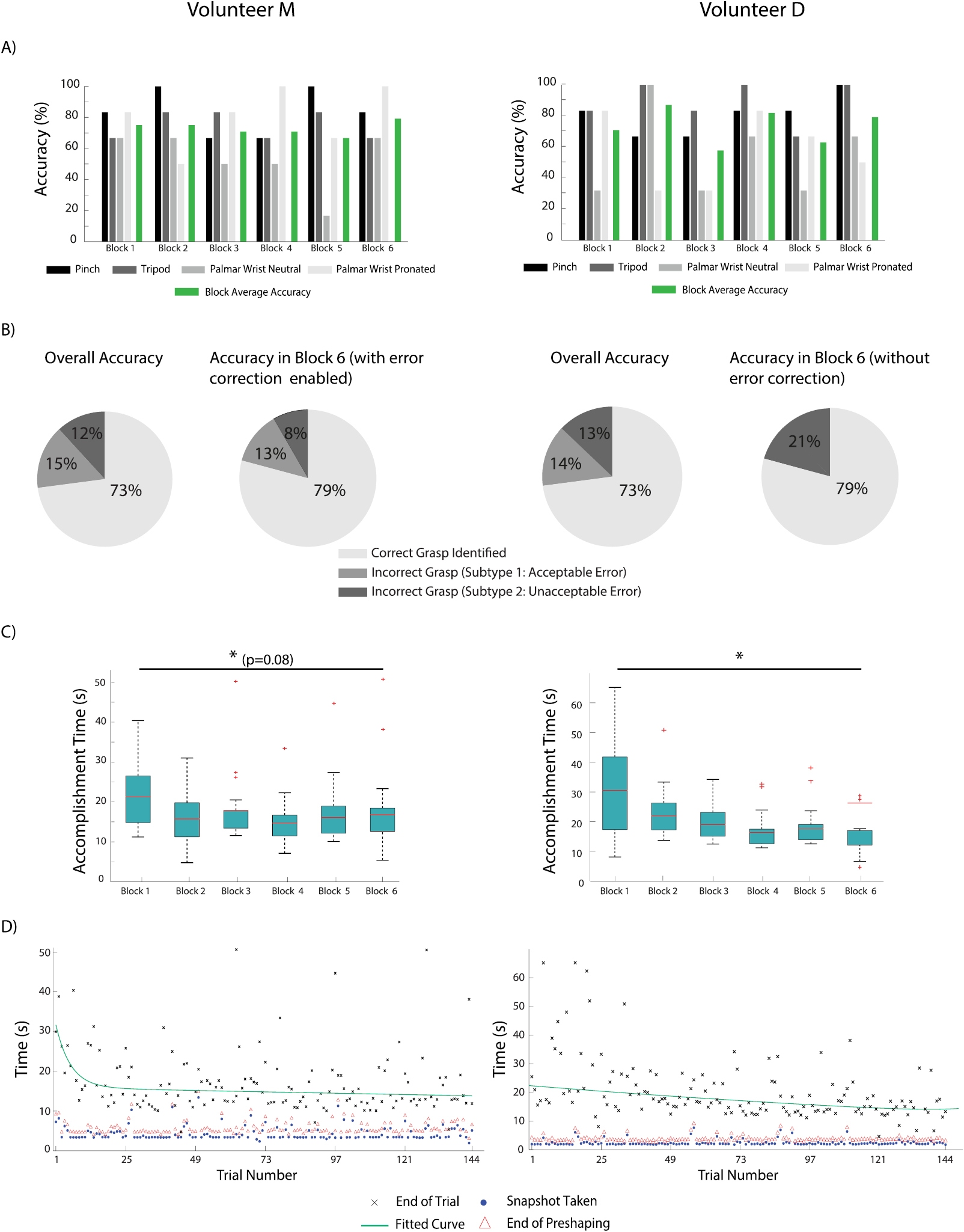
Yang paling penting, prostesis bionik seperti itu bekerja dalam waktu yang hampir nyata: tipe penangkapan dipilih dalam milidetik, berbeda dengan 0,75-24 detik untuk lengan bionik, di mana penglihatan mesin melakukan klasifikasi objek. Bahkan prostesis bionik terbaik dari jenis ini,
CyberHand dan
SmartHand, masing-masing dapat menangani pengenalan dalam 4 dan 1 detik. Mereka menjalankan komputer yang kuat dan menunjukkan akurasi penangkapan masing-masing 93% dan 94%. Meskipun akurasi sedikit lebih tinggi di sana, menangkap secara real time atau dengan jeda satu detik adalah perbedaan besar, sehingga pencapaian insinyur biomedis Inggris tidak boleh dianggap remeh. Ini adalah tangan bionik pertama yang dapat mengambil benda "secara intuitif", seolah-olah tanpa berpikir. Seseorang hanya memberi sinyal dengan gerakan kecil pada otot bahwa benda itu perlu ditangkap - dan tangan yang cerdas dengan jaringan saraf dengan cepat melakukan sisanya dengan sendirinya.
Artikel ilmiah ini
diterbitkan 3 Mei 2017 di jurnal
Journal of Neural Engineering (doi: 10.1088 / 1741-2552 / aa6802).