Hari ini saya ingin memberi tahu Anda sedikit tentang apa yang menarik terjadi sejak
artikel terakhir diterbitkan , di mana saya memberi tahu bagaimana kami bertiga membuat GPS bawah air dalam setahun.
Kami memutuskan secara real time untuk mengevaluasi perbedaan antara GPS bawah laut kami dan GPS nyata. Dan bahkan tidak hanya dengan GPS, tetapi dengan data GPS / GLONASS gabungan. Jika Anda tertarik dengan apa yang terjadi, selamat datang di kucing!
Secara umum, kami entah bagaimana sudah memeriksa ini, tetapi dalam kondisi "laut" yang baik. Sekarang muncul ide untuk memeriksa semuanya dalam genangan air. Di sini saya harus menjelaskan bahwa untuk setiap hidroousousika, perairan dangkal dianggap (dan tidak sia-sia) yang paling sulit. Beberapa produsen tidak bekerja di air dangkal sama sekali, mereka mengatakan ada lapisan permukaan yang mengerikan dengan gas terlarut dan beberapa refleksi, dll.
Secara umum, ada
genangan air di dekat kita
Ini adalah tampilannya dari pantai:

Kedalaman maksimum di dalamnya adalah sekitar 2-2,5 m, yaitu badan air yang lebih dangkal di mana navigasi mungkin diperlukan, sulit untuk dibayangkan.
Khusus untuk percobaan yang akan datang, sebuah kapal umpan yang dikendalikan oleh radio Tiongkok dibeli - ideal untuk keperluan kita: cukup (kadang-kadang menurut saya terlalu banyak) kapal berkecepatan rendah dan lapang, yang dengan mudah memungkinkan untuk berbagai modifikasi.
Beginilah penampilan kapal itu semula:

Kemudian kami melakukan sejumlah perbaikan. Elektronik asli tetap hampir semua dan hanya sedikit bergerak, dengan pengecualian mekanisme untuk mengatur ulang umpan - karena tidak perlu, itu benar-benar dibongkar.
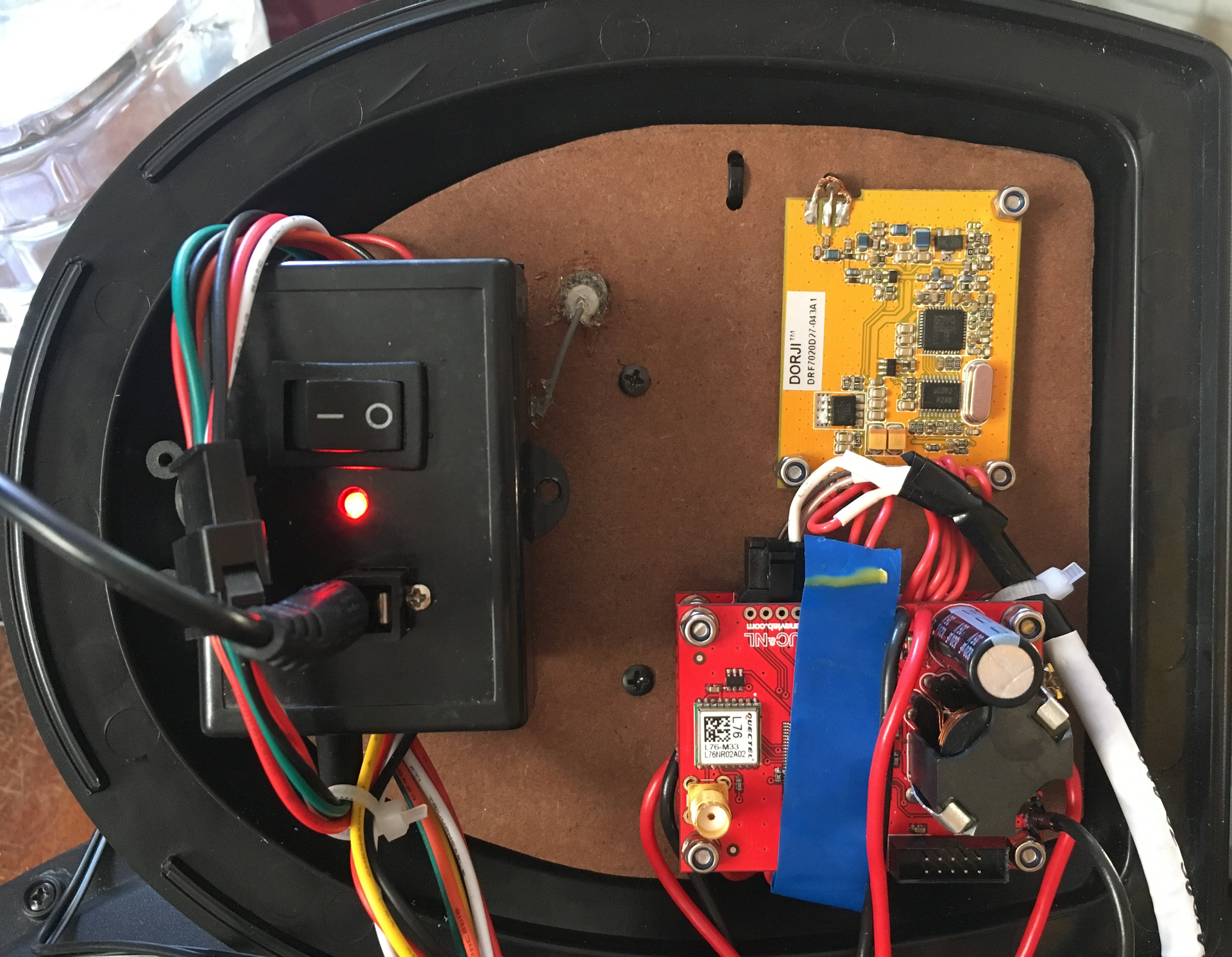
Selain itu dipasang di kapal:
- papan dengan penerima GPS / GLONASS (tidak terlihat di foto - di bawah panel hardboard);
- 433 MHz DORJI modul radio + antena untuk itu;
- papan kami dengan prosesor yang mem-parsing output dari modul GPS, penerima navigasi akustik dan mengirimkan semuanya melalui udara;
- baterai timbal tambahan 1,5 Ah * dari mana semua konsumen kami diberi makan;
- Konektor pengisian Bulgin Bucaneer untuknya;
- sakelar sakelar dengan penutup karet (seperti pada pelampung kami), yang mencakup semua sistem kami;
- sepasang entri kabel sederhana di mana kabel penerima navigasi RedNODE dimasukkan di dalam perahu dan kabel emitor akustik adalah output (digunakan dalam percobaan lain).
Papan lain terlihat di foto - ini hanya dari percobaan lain.
Seperti yang saya katakan di artikel sebelumnya, GPS bawah laut kami adalah sistem navigasi long-base, dan untuk mengoperasikannya di kolam, empat pelampung sinyal navigasi satelit mengambang harus dipasang. Ini adalah minus utama dari pangkalan yang panjang - Anda masih perlu meletakkan sesuatu di kolam, yang berarti Anda membutuhkan perahu. Tapi kali ini kami ingin menunjukkan bagaimana semuanya dapat dilakukan secara eksklusif dari pantai.
Ada empat dari kita (ya, tidak ada tiga dari kita lagi!), Dan menurut gagasan itu, semua orang membawa pelampung bersamanya dan pergi ke titiknya di tepi kolam, di mana dia meletakkan pelampungnya dari pantai pada seutas tali (sehingga mereka tidak akan berlayar - mereka tidak mengambil perahu) .
Di sini pada titik saya (Pelampung No 4) itu terlihat seperti ini:

Di pantai tempat saya berada, ada dua pendekatan yang mudah. Dua rekan kerja saya di pantai seberang kurang beruntung - hanya ada pantai yang cukup lembut, ditumbuhi alang-alang, diinjak-injak oleh nelayan di beberapa tempat. Akibatnya, seperti yang akan dilihat dari lokasi, pelampung No. 3 harus dilakukan sangat jauh dari yang lain, hanya karena di tempat itu cukup sulit untuk mendekati air.
Tangkapan layar di bawah ini menunjukkan bagaimana pelampung ditempatkan (diletakkan) selama percobaan:

Ngomong-ngomong, ke depan, saya akan mengatakan bahwa koordinat pelampung diperoleh dari penerima navigasi, dan tidak diukur langsung di darat.
Foto itu menunjukkan dengan sangat jelas bahwa di sebelah kiri garis kondisional antara pelampung No. 1 dan No. 2 ada gumuk pasir. Sedemikian rupa sehingga bangau berjalan di sana dengan berjalan kaki (dia kira-kira satu lutut di sana), yang kali ini tidak berhasil.
Dari pos saya, pantai yang berlawanan terlihat seperti di foto berikutnya, dan orang yang duduk di sebelah kiri adalah milik kami, ia memegang pelampung No. 1 di tali.

Dalam foto yang sama, kapal kami sendiri terlihat dalam proses berlayar.
Beginilah tampilannya yang dipasang di sebelah salah satu pelampung kami:

Kabel pelampung harus dibuat lebih pendek dengan menariknya ke mata pembawa pelampung dengan screed nilon, jika tidak emitor hanya akan berbaring di dasar berlumpur. Dalam posisi normal, jarak dari tepi air ke transmiter akustik pelampung adalah 1,5 meter. Anda juga dapat melihat bahwa penerima navigasi akustik sudah terpasang pada kabel yang cukup panjang. Panjangnya 1,5 meter, ingat ini, di masa depan itu akan menjelaskan beberapa fitur hasil.
Pengaruh silinder yang menggantung bebas pada pergerakan kapal sangat signifikan. Faktanya, radius belok yang sudah tidak senonoh 3-4 meter menjadi menakutkan: di air yang tenang dibutuhkan 10-15 meter untuk berputar. Upaya saya untuk menjaga kapal pada jalur dengan angin sisi ringan akan terlihat di trek yang dihasilkan.
Berbicara tentang lagu. Sebelum percobaan, tidak ada kepastian 100% bahwa sistem, pada prinsipnya, akan bekerja secara memadai dalam kondisi seperti itu. Namun demikian, saya melihat titik pertama di layar hampir satu menit setelah penerima tenggelam dalam air.
Saya melihat ini di layar aplikasi teknologi kami, sesuatu seperti ini:
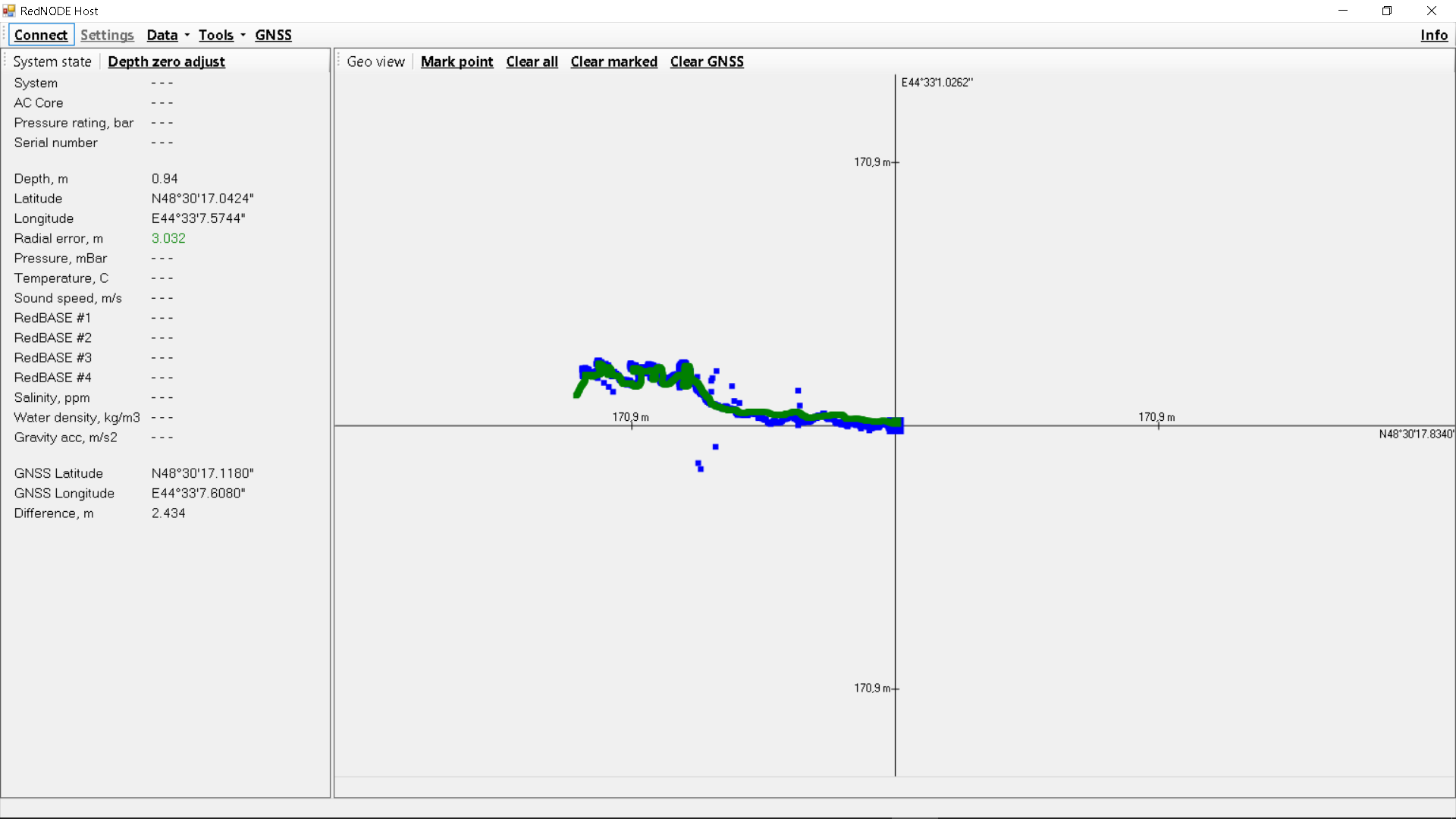
Trek dari penerima GPS / GLONASS ditampilkan dalam warna hijau, dan trek dari penerima akustik ditampilkan dalam warna biru. Intinya di panel kiri menampilkan nilai perbedaan dalam meter antara pembacaan saat ini menurut GPS / GLONASS dan sistem navigasi akustik. Saya harus segera mengatakan bahwa "combiner" data yang dikumpulkan dengan tergesa-gesa hanya memilih sebagian dari informasi yang ditransmisikan oleh penerima navigasi dan banyak bidang tetap kosong.
Dan akhirnya, trek yang dihasilkan dalam semua kemuliaan:
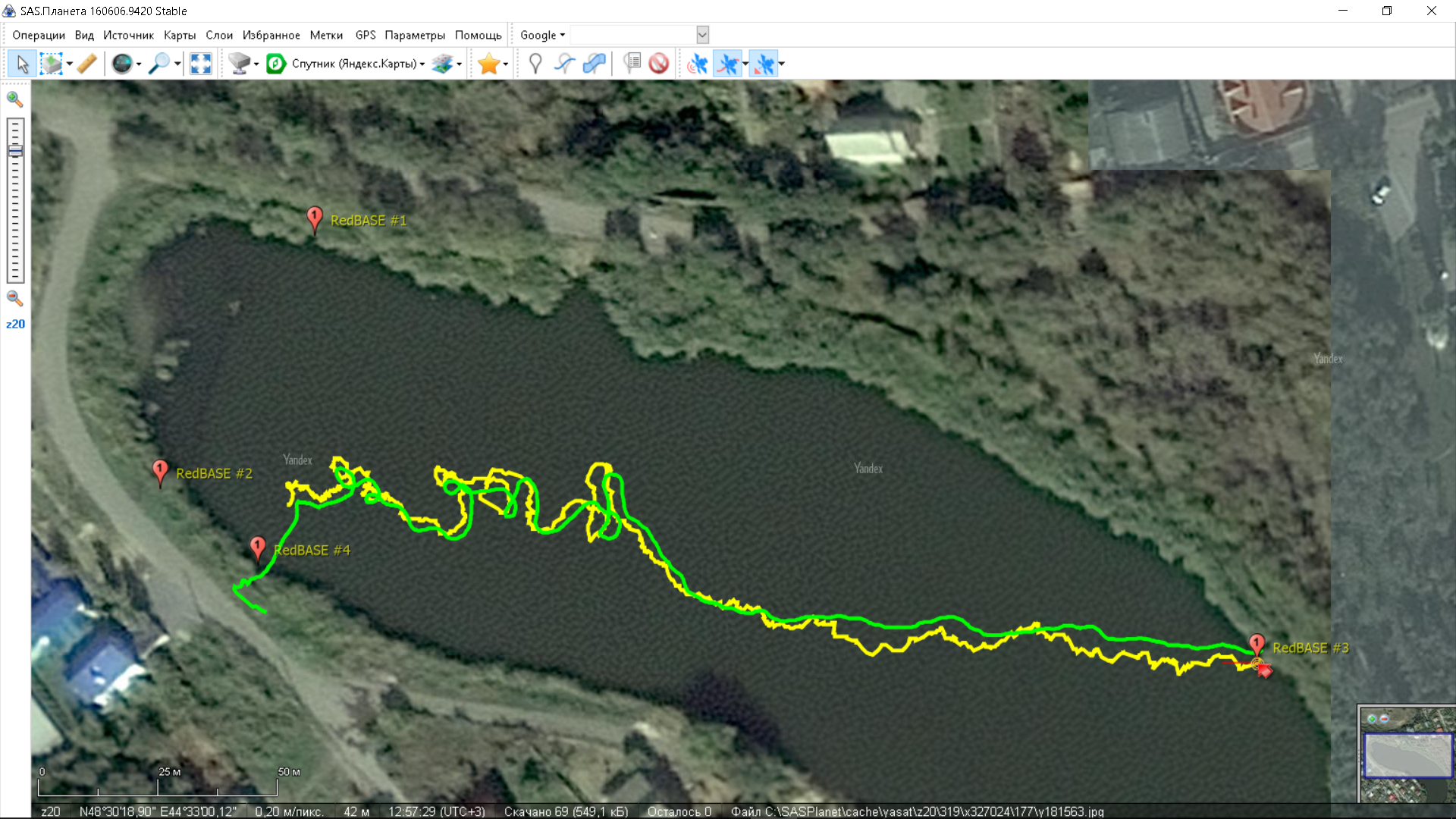
Perbedaan maksimum antara lintasan di tempat yang berbeda adalah sekitar 3 meter, yang dijelaskan, pertama, oleh fakta bahwa sistem speaker jauh lebih dipengaruhi oleh pergerakan objek yang diposisikan pada keakuratan posisi yang dihitung, hanya karena antara penerimaan sinyal dari pelampung dia berhasil bergerak cukup, dan, kedua, fakta bahwa penerima navigasi akustik menggantung pada kabel 1,5 meter di belakang kapal dengan semua konsekuensi berikutnya.
Pengulangan lintasan dengan beberapa penundaan diperoleh dengan menggunakan sistem navigasi akustik di bagian-bagian itu di mana perahu itu bermanuver secara intensif terlihat sangat khas.
Secara umum, kami tidak merencanakan perjalanan mendaki yang lama karena takut kehilangan perahu di buluh, tetapi pada titik tertentu saya menyadari bahwa saya tidak mungkin dapat dengan aman menggunakan kapal dan memutuskan untuk mengarahkannya ke angin, yang hanya membawanya ke pelampung kami No. 3, tempat itu aman dan ditangkap oleh rekan saya.
Apa yang kita dapatkan dari hasil percobaan?
- sistem bekerja di reservoir yang mengerikan dalam hal hidrologi
- Akurasi sebanding dengan akurasi GPS terestrial
- tidak memerlukan kalibrasi
- terintegrasi tidak lebih rumit daripada penerima GPS konvensional
- penyebaran tidak membutuhkan banyak waktu (dalam kasus kami, tiga pelampung berada di dalam air setelah 5 menit, dan yang keempat setelah 10 lainnya, dan kemudian, semua waktu ini dihabiskan untuk berkeliling kolam)
Tidak nyaman menampilkan trek secara detail menggunakan gambar, jadi saya mengunggah trek secara terpisah sehingga semua orang yang tertarik dapat menganalisisnya:
trek RedWAVE 12-05-2017Terima kasih atas perhatian anda
"Dan itu saja untuk hari ini!" (C)
Perhatian! Perbarui! Ternyata, jika Anda mengikuti tautan ke
genangan air kami, Anda dapat melihat bahwa sebuah pesawat tak berawak terbang tepat di atas tempat percobaan kami pada saat menembak area:
