
Exoskeleton robot dipandang sebagai masa depan industri, rehabilitasi fisik, dan membantu orang tua, tetapi kemajuan di bidang ini lambat. Namun, semuanya dapat berubah berkat
penemuan para peneliti dari College of Engineering di Carnegie University - Mellon. Mereka mengembangkan sistem umpan balik yang menyelaraskan pergerakan anggota badan robot dengan langkah manusia.
Selama satu jam, sistem memonitor pernapasan operator - dan secara iteratif mengubah 32 mode exoskeleton hingga menemukan yang paling optimal.
Identifikasi pola kekuatan optimal motor exoskeleton saat berjalan adalah tugas yang sulit. Setiap orang memiliki karakteristik gaya berjalan masing-masing, dan karakteristik langkah tergantung pada banyak kondisi, termasuk permukaan tempat orang tersebut berjalan. Untuk mengatasi masalah ini, para insinyur menggunakan metode brute force ketika sistem menguji timing dan kekuatan yang berbeda untuk menemukan mode optimal yang memberikan manfaat metabolisme terbesar. Tetapi untuk mengukur manfaat metabolisme, Anda perlu mengukur nafas pemakainya berulang kali, yang, pada gilirannya, mengurangi jumlah pengaturan yang dapat diuji selama kekerasan. Artinya, sulit untuk mengatur prosedur yang paling optimal di sini.
Sekelompok peneliti dari College of Engineering di Carnegie University - Mellon dalam
artikel ilmiahnya menggambarkan algoritma yang mengoptimalkan pola torsi semua motor exoskeleton selama proses berulang 1 jam dengan perkiraan waktu-nyata penghematan metabolisme. Kerangka luar secara harfiah beradaptasi dengan orang tersebut, melacak pernapasannya.
Selama tes ilmiah sistem berulang dengan seseorang "di tengah siklus" pada beberapa sukarelawan, sistem menunjukkan penghematan metabolisme rata-rata 24,2 ± 7,4% dibandingkan dengan berjalan dengan exoskeleton dimatikan. Artinya, seseorang menghabiskan sekitar seperempat lebih sedikit energi saat menggunakan exoskeleton. Pengurangan ini sedikit lebih baik daripada hasil yang diperoleh oleh kelompok penelitian lain, tetapi ini adalah angka yang sangat baik, mengingat bahwa kerangka luar hanya digunakan untuk satu kaki.
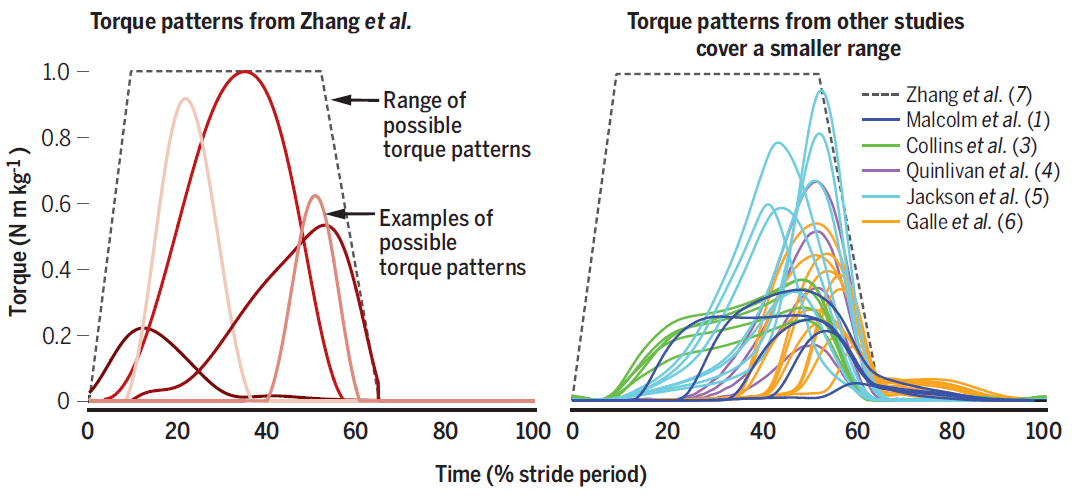
Selain itu, setelah mengoptimalkan algoritma, hasilnya ditingkatkan pada kerangka yang sama. Tetapi yang paling penting, pelatihan seperti itu jauh lebih cepat daripada menggunakan kekuatan kasar standar dan yang telah ditunjukkan dalam penelitian lain. Ini memungkinkan Anda untuk mencoba mode operasi yang lebih beragam selama kekuatan brutal (lihat grafik).
Skema interaktif semacam itu dengan pemantauan terus-menerus terhadap pernapasan manusia (human-in-the-loop) memungkinkan Anda untuk beradaptasi dengan keadaan seseorang saat ini, hingga perjalanannya dalam kondisi saat ini.
Mengapa metode adaptasi untuk berjalan seseorang lebih efektif daripada metode lain? Sejak 1970-an, para ilmuwan telah menunjukkan bahwa itu adalah praktik variabel yang berkontribusi pada perolehan keterampilan. Sebelum ini, diyakini bahwa pelatihan harus dilakukan dalam kondisi yang konstan dan tidak berubah. Secara kasar, seseorang harus mengulangi hal yang sama berkali-kali untuk mempelajarinya dan memperoleh keterampilan. Tapi tidak. Ternyata, praktiknya harus bervariasi: kondisinya harus berubah - sehingga perolehan keterampilan berjalan jauh lebih cepat. Sejak itu, praktik variabel telah digunakan dalam kedokteran, olahraga, dan pelatihan kejuruan. Jadi, algoritma para insinyur di Carnegie University - Mellon tampaknya menggunakan prinsip ini, yang telah lama digunakan untuk mendidik orang. Penghematan metabolik yang ditunjukkan di sini dicapai melalui kombinasi optimasi torsi yang efektif dan adaptasi manusia ke berbagai pola torsi yang diurutkan dalam proses.
Para penulis karya ilmiah menyarankan bahwa dengan cara ini dimungkinkan untuk mempercepat kembalinya keterampilan motorik penuh kepada pasien di mana keterampilan ini terganggu, misalnya, setelah stroke. Variabilitas torsi exoskeleton akan memberikan lingkungan belajar yang variabel di mana keterampilan pasien akan pulih lebih cepat. Ini seperti berlari di medan yang kasar, yang melatih kaki jauh lebih baik daripada berlari di treadmill datar. Alih-alih berjalan dengan upaya yang sama setiap hari, seseorang harus beradaptasi, mengubah kecepatan, dan upaya: ini akan menjadi latihan yang benar-benar efektif.

Selain itu, para ilmuwan berencana untuk mengatur sendiri tugas lain. Jika sekarang tujuan utama adalah untuk menyelamatkan keseimbangan metabolisme (yaitu, penghematan energi dangkal) ketika berjalan, maka di masa depan mereka dapat menetapkan tujuan baru untuk optimasi: kecepatan. Dalam beberapa tahun terakhir, penelitian ilmiah menunjukkan bahwa exoskeletons sebenarnya dapat meningkatkan kecepatan rata-rata orang saat berjalan. Sudah waktunya untuk memeriksa apakah ini dapat dilakukan tanpa mengorbankan keseimbangan metabolisme.
Bagaimanapun, exoskeleton interaktif, yang memantau pernapasan pejalan kaki dan keseimbangan metaboliknya, bertindak sesuai dengan program yang diberikan - bukankah itu masa depan? Bahkan orang yang sehat pun tidak akan menolak alat semacam itu. Misalnya, dalam mode normal, rangka luar hanya membuat Anda berjalan lebih mudah. Tetapi jika Anda terlambat untuk rapat, tekan tombol Turbo, dan kerangka luar mulai bekerja dalam mode prioritas kecepatan.
Artikel ilmiah ini
diterbitkan dalam jurnal
Science pada 23 Juni 2017 (doi: 10.1126 / science.aan5367).