Sistem navigasi akustik bawah air domestik pertama yang tersedia secara komersial sistem UKB
Kami tidak kehilangan kecepatan. Sejak publikasi artikel kami sebelumnya,
Underwater GPS: kelanjutannya sudah hampir musim panas, dan hari ini saya akan memberi tahu Anda apa yang kami lakukan selama ini.
Pada artikel pertama tentang
GPS bawah air kami
, kami melakukan tinjauan singkat tentang sistem penentuan posisi yang ada dan akustik bawah air pada khususnya.
Di bawah potongan, saya akan berbicara tentang bagaimana kami membuat sistem ultrashort-base.
Jadi, pada tahun 2015, kami bersumpah untuk pernah terlibat dalam sistem UCB (USBL - ultrashort base-line). Inti dari sistem ini adalah keberadaan sumber sinyal (misalnya, suar-transponder) dan antena yang menentukan arah kedatangan sinyal. Array bertahap atau sederhana: antena pencari arah.
Banyak pengguna kami dalam satu atau lain cara berbicara tentang ketidaknyamanan relatif dari prosedur penempatan float, dan bahwa koordinatnya dikerjakan “di bawah” (seperti pada GPS bawah air kami).
Terkadang Anda
selalu ingin memasang suar ke objek yang diposisikan (penyelam atau TNPA / ANPA) dan menentukan lokasi relatif terhadap titik kontrol permukaan (perahu, dermaga, dll.) Dengan menurunkan antena USBL ke dalam air. Dalam hal kemudahan penyebaran, ini adalah sistem yang paling nyaman dan sederhana. misalnya, MicronNAV yang disebutkan dalam artikel pertama kami adalah sistem USBL biasa, dan juga yang
ini . NaviMate yang luar biasa terkenal, dalam teori, juga direncanakan sebagai sistem UKB: satu pelampung terapung harus mengarahkan penyelam, menghitung lokasi absolut mereka dan memberikannya kembali kepada mereka.
Arah penemuan antena adalah hal yang cukup umum. Misalnya, kapal selam memiliki susunan antena konformal yang berisi ribuan transduser individu. Tentu saja, tidak dapat dikatakan bahwa tidak ada yang melakukan sistem UKB sebelum kita di Rusia. Namun, sejauh yang kami tahu, sistem kami adalah sistem domestik pertama yang tersedia secara komersial (dan umumnya yang paling terjangkau!).
Tetapi tidak ada apapun di alam semesta ini yang gratis. Untuk kenyamanan Anda harus membayar. Menurut kolega kami, yang mengembangkan algoritma pengoperasian sistem pencarian arah dan penulis firmware antena penemuan arah:
“Pengguna UXB akan menikmati kemudahan penyebaran .... 10-15 menit pertama. Sama seperti yang dibutuhkan untuk penempatan pelampung sistem pangkalan panjang di area air. "
Faktanya adalah bahwa kesalahan dalam memperkirakan waktu kedatangan dengan 1-2 meter dalam sistem basis panjang tidak akan menghasilkan banyak cuaca, karena ± 1 meter adalah kesalahan yang dapat diterima dalam tugas penentuan posisi penyelam atau robot.
Kesalahan dalam definisi sinar "pertama" atau "langsung", dalam kasus sistem UHF, akan mengarah pada penentuan arah kedatangan beberapa pantulan (atau jumlah pantulan - "sinar"), tetapi dapat datang dari mana saja, semuanya tergantung pada area perairan tertentu. Ini terutama mempengaruhi penentuan sudut vertikal. Tangkap refleksi dari permukaan atau dari bawah dan sekarang Anda memiliki rentang nilai dalam kisaran 90 derajat, dan ini adalah sistem navigasi yang biasa saja.
Dalam sistem modern (dan juga milik kita), sudut vertikal tidak diperhitungkan. Alih-alih, transponder beacon memiliki sensor kedalaman bawaan dan dapat mengirimkan kedalamannya atas permintaan antena penunjuk arah. Selanjutnya, mengetahui perbedaan kedalaman dan kisaran miring, jarak sepanjang permukaan ditentukan secara sepele dari teorema Pythagoras.
Selain itu, tugas memposisikan antena itu sendiri berdiri secara terpisah. Diturunkan pada kabel dari kapal pendukung atau dari dermaga, itu tergantung dan memutar dalam gelombang dan arus. Dengan demikian, jika sudut kedatangan sinyal ditentukan dalam sistem koordinat antena, dan tidak stabil, maka ketidakstabilan ini masuk ke lokasi yang dihitung dari objek yang diposisikan.
Seringkali, untuk menghindari masalah seperti itu, antena dipasang pada sebuah tiang. Kami melakukan ini juga, meskipun antena kami memiliki AHR yang terintegrasi.
Kami menamai sistem kami Zima.
dalam waktu dekat kami berencana untuk merilis versi perbaikan yang disebut Zima blizkoSistem kami terdiri dari antena transceiver yang paling banyak menemukan arah Zima-B (ase). Itu bisa dilihat di foto di bawah ini.
 Gambar 1 - Zima-B - antena pencari arah yang dipasang pada batang
Gambar 1 - Zima-B - antena pencari arah yang dipasang pada batangDan beacon-responder Zima-R (esponder), yang dapat berdiri sendiri, dilengkapi dengan baterai (seperti dalam foto), dan dihubungkan dengan carrier.
Dalam hal ini, pengguna menjadi tersedia semua inovasi dan fasilitas kami:
- kemampuan untuk mengirim hingga 32 perintah telecontrol
- Pengukuran timbal balik dari jarak ke antena pencari arah
- transfer azimuth ke stasiun pangkalan (jika ada perangkat di media yang menentukan arah ke utara - kompas pada masyarakat umum)
Suar transponder dalam faktor bentuk yang sama dengan penerima GPS bawah air kami, RedNODE. Seperti yang telah disebutkan, ia memiliki sensor tekanan / suhu bawaan untuk rentang 0-30 Bar dan memungkinkan untuk mendapatkan akurasi hingga kedalaman 0,05 m dan suhu hingga 0,1 derajat. Antena, juga dilengkapi dengan sensor yang sama, karena entah bagaimana tidak inovatif untuk mengukur kedalaman dengan kabel.
 Gambar 2 - Zima-R - transponder suar (dengan paket baterai)
Gambar 2 - Zima-R - transponder suar (dengan paket baterai)Kami melakukan pengujian umum sistem pada 3 Agustus tahun ini di Sungai Pichuga di Wilayah Volgograd, dekat tempat mengalirnya ke Waduk Volgograd. Ini adalah "tempat latihan" favorit kami, kami tahu semua lubang dan elemen profil secara langsung.
Pada akhir Juli dan awal Agustus, cuaca biasanya sangat panas. Lapisan atas yang panas muncul pada reservoir (terjadi
termoklin ), air mulai mekar, secara umum, kondisinya menjadi sulit. Hanya seperti itu dan perlu menguji peralatan. Lagi pula, tidak ada yang tertarik pada karakteristik yang Anda peroleh di kolam pengukur yang tenggelam sempurna, semua orang bekerja di badan air nyata.
Foto momen kerja untuk atmosfer:
 Gambar 3 - Direktur Teknik, Kepala perancang sistem USBL, Direktur Litbang (dari kiri ke kanan) =)
Gambar 3 - Direktur Teknik, Kepala perancang sistem USBL, Direktur Litbang (dari kiri ke kanan) =)Satu antena dapat bekerja dengan 23 transponder (walaupun sulit bagi saya untuk membayangkan tugas seperti itu, tetapi masih). Beacon dipisahkan oleh kode, dan bekerja dengan masing-masing terjadi secara berurutan.
Gambar berikut menunjukkan tangkapan layar host (perangkat lunak remote control):
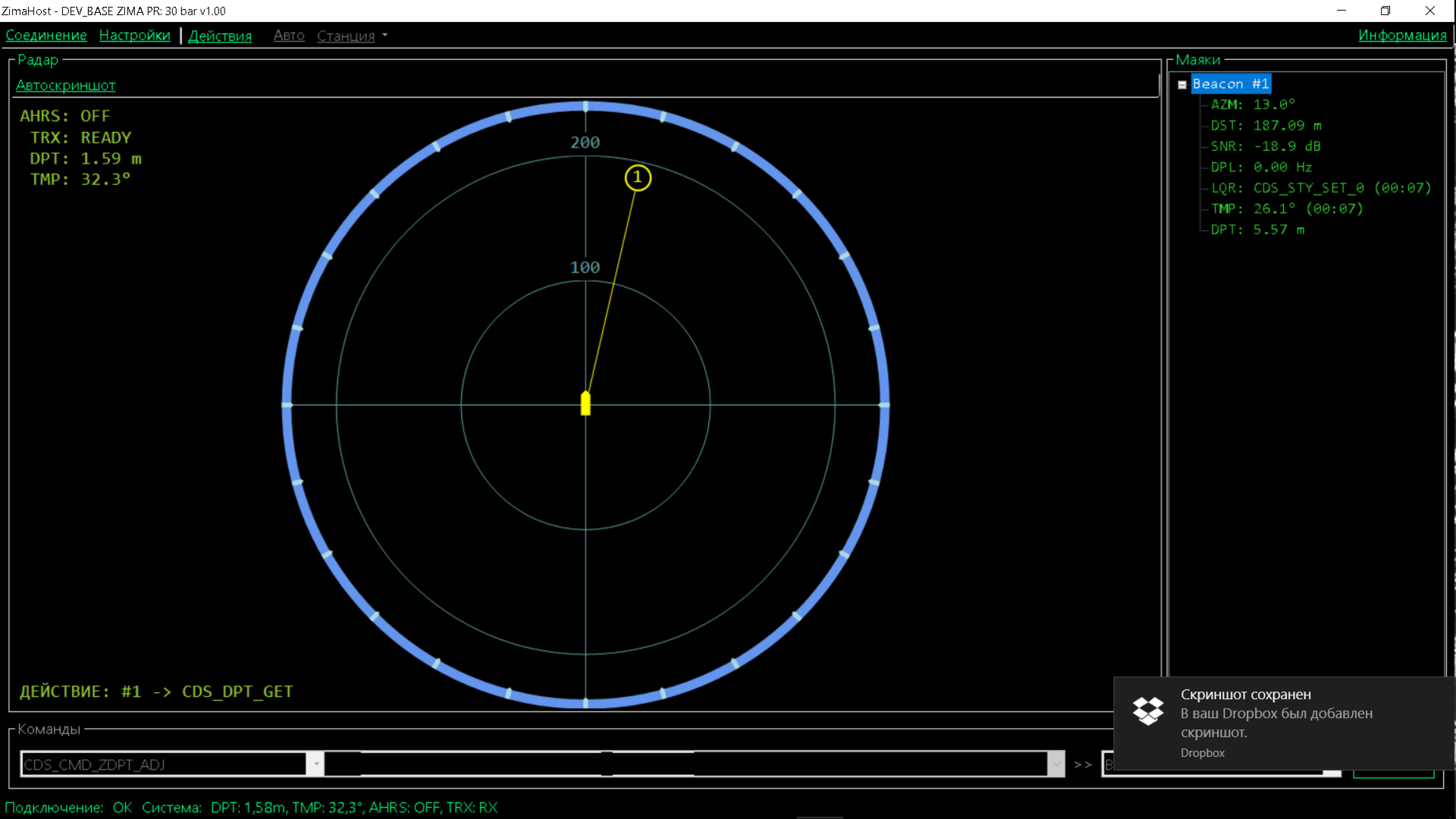
Gambar 4 - Screenshot dari Zima USBL Host
Antena terhubung ke PC melalui adaptor UART-USB. Secara tradisi, kami menggunakan protokol NMEA0183-like (open) dan semua kode sumber host terbuka di
github .
Harap dicatat: tangkapan layar menunjukkan bahwa mercusuar pada kedalaman 5,5 meter, suhu air pada sensornya adalah 26,1 ° C (!), Dan pada antena itu sendiri, yang menggantung satu setengah meter dari permukaan, itu adalah 32,3 ° C (CARL!), Di kedalaman tempat di daerah ini adalah sekitar 15-20 meter
Dari pengaturan eksternal, sistem hanya membutuhkan salinitas (dari mana kecepatan suara ditentukan oleh pembacaan kedalaman dan suhu) dan jarak maksimum (waktu tunggu maksimum untuk respons suar dihitung dari itu). Menurut metode kami (yang patennya sedang diproses), suar juga dapat menentukan jarak ke antena dan mendukung fungsi pengaturan jarak jauh air salinitas dari stasiun pangkalan.
Dan akhirnya, hal paling berharga yang kami dapatkan dalam percobaan ini (kecuali untuk penyamakan) adalah video 7 menit (tangkapan layar) dari tuan rumah:
ZimaHost - videoBiarkan saya jelaskan bahwa mercusuar itu tetap tidak bergerak - terbentang di antara jangkar dan pelampung, dan antena yang dipasang pada batang tergantung dari sisi perahu (karet). Relativitas pergerakan, secara langsung, secara langsung: mercusuar membuat putaran kehormatan dengan radius lebih dari 100 meter, yang sebenarnya disebabkan oleh rotasi kapal dan, akibatnya, antena.
Kami selalu punya sesuatu untuk diceritakan. Jika sesuatu tampak tidak dapat dipahami atau diungkapkan dengan buruk - selamat datang di komentar. Rekan-rekan saya dan saya akan menyelesaikan masalah.
PS Dalam tes ini, kami menguji tidak hanya sistem Zima, tetapi juga beberapa gadget menarik lainnya, yang akan saya coba tulis sedini mungkin.
Menunggu untuk anda:
- Suara Presiden setelah 700 meter cyanobacteria
- kasus untuk memanggil penyelam
- gambar teka-teki (sekarang!)
Coba tebak dari foto perangkat apa itu dan mengapa diperlukan: