NAP * - Inti Independen Periferal
Artikel sebelumnya tentang Core Independent Peripherals Mikrokontroler dalam mengalihkan catu daya
Bagian 3
Bagian sebelumnya ( Bagian 1 , Bagian 2 ) membahas bagaimana Periferal Mikrokontroler Mikrochip Independen-Core memungkinkan Anda membangun pengontrol PWM untuk mengalihkan catu daya dari "batu bata" dengan membuat koneksi antara berbagai modul periferal. Jika kita menambahkan "batu bata" baru ke pengontrol PWM yang dijelaskan di atas, kita akan mendapatkan fungsi baru. Pertimbangkan apa lagi yang bisa dilakukan.
Otomasi Fitur
Perlindungan unit daya
Masalah penting dalam elektronika daya adalah penyediaan fungsi pelindung. Jika umpan balik rusak, maka mungkin ada situasi ketika sakelar daya akan terbuka untuk waktu yang tidak valid.
Mikrokontroler PIC dengan core-independent peripherals (CIP) memiliki timer dengan fungsi batas (Hardware Limit Timer, HLT).
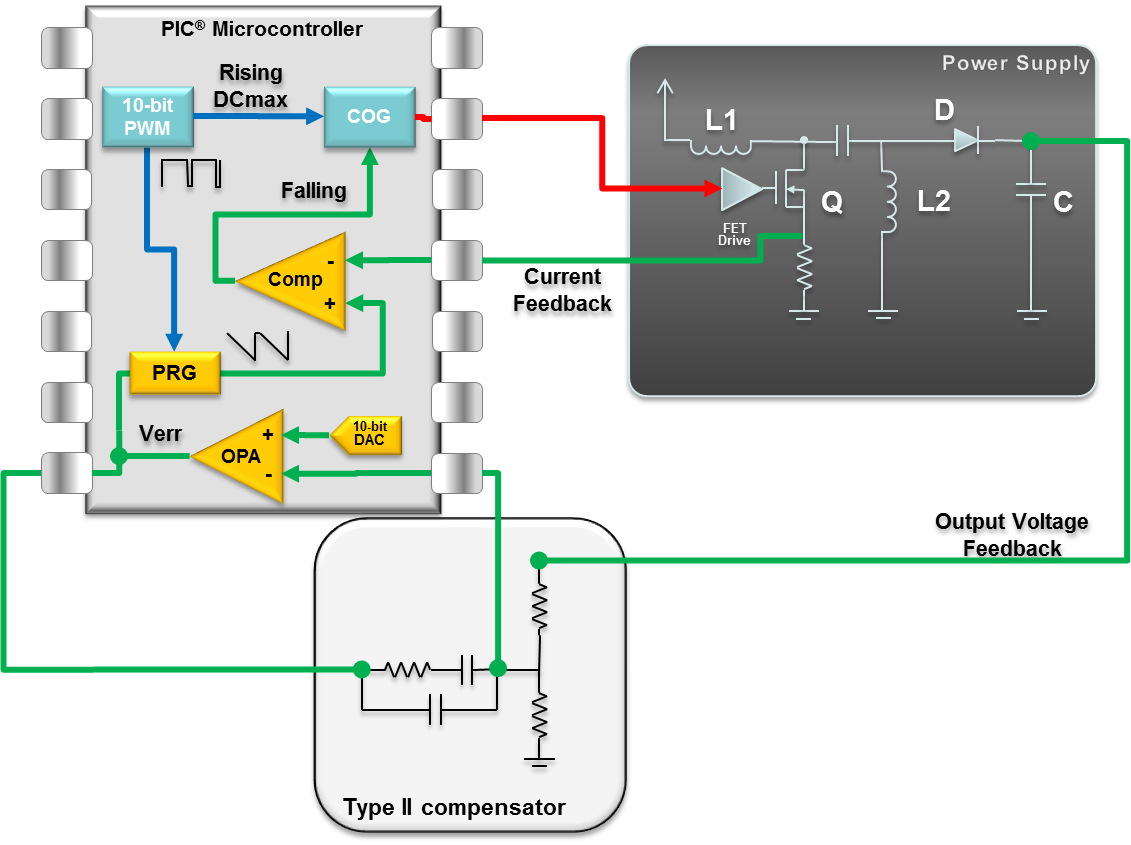
Pertimbangkan contoh implementasi pengontrol PWM dengan perlindungan otomatis (membatasi lebar pulsa output dan kemungkinan mematikan daya secara otomatis).

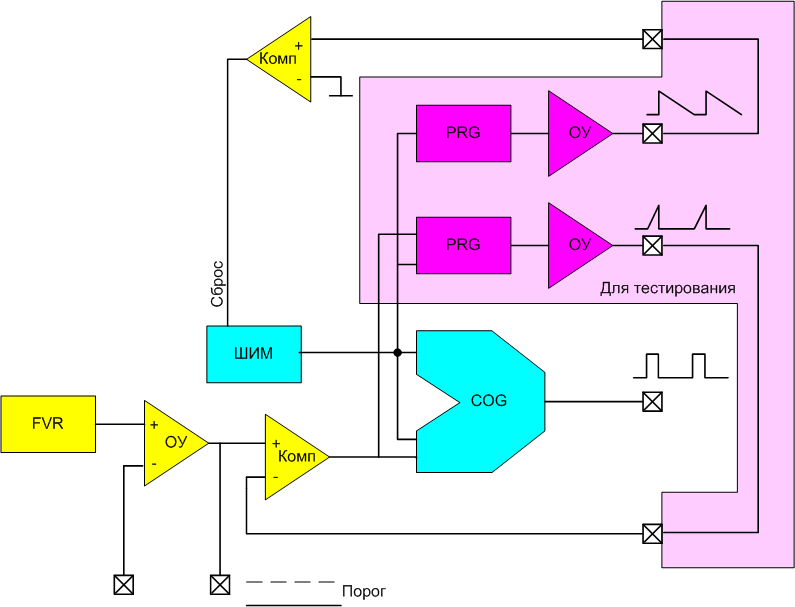
Fig. 3.1. Pengontrol PWM
Timer HLT1 - menetapkan batas waktu untuk status terbuka MOSFET; timer HLT2 - mengatur waktu untuk status off Toff.
COG - Generator Keluaran Pelengkap - menghasilkan sinyal kontrol MOSFET.
Algoritma (inisialisasi periferal mikrokontroler):
- Timer HLT2 memulai pemasukan COG (mis., Power MOSFET) dan cockes HLT1. Arus melalui induktansi dan tegangan meningkat. Ketika tegangan bertepatan dengan Vref, pembanding dipicu.
- Dalam mode normal, komparator me-reset COG, bersamaan dengan COG, HLT2 (Toff) diatur ulang.
- Sinyal pembanding dikosongkan untuk beberapa saat ketika saklar daya diaktifkan, sehingga mencegah alarm palsu yang mungkin timbul dari gangguan (pada Gambar 3.1, sinyal pengosongan diatur untuk kejelasan pada pembanding, pada kenyataannya, fungsi pengosongan adalah fitur dari modul COG, itu tidak menerima sinyal dari komparator).
Gambar 3.2 menjelaskan pengoperasian pengontrol PWM tersebut.
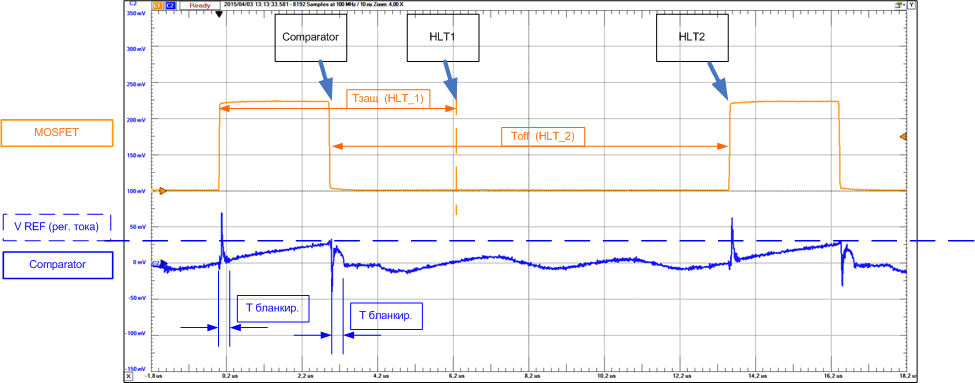
Gambar 3.2. Diagram tegangan menjelaskan pengoperasian pengontrol PWM (Gbr. 3.1).
Jika pembanding tidak berfungsi selama waktu aman Tzt., Maka timer batas HLT1 akan mengatur ulang COG dan membatasi waktu buka saklar daya. Waktu pembukaan yang lebih lama untuk kunci dapat berarti umpan balik terbuka, kerusakan transistor daya atau induktansi.
Modul COG memiliki fungsi untuk memblokir operasi, dalam hal ini program dapat membukanya. Ini dapat digunakan untuk diagnostik - jika HLT1 terus-menerus dipicu, program dapat mematikan pengontrol PWM dan memberi sinyal kerusakan.
Mulai lembut
Jika energi tetap dalam induktansi selama periode PWM, maka selama beberapa periode ini dapat menyebabkan saturasi. Pada saat yang sama, pada awal sumber, tegangan keluaran adalah nol dan umpan balik tegangan belum berfungsi. Yaitu kondisi dibuat untuk menjenuhkan induktansi daya.
Kontrol tegangan lunak dapat dimulai dengan meningkatkan induktansi atau dengan membentuk siklus kerja rendah di awal dengan peningkatan siklus tugas lebih lanjut.
Mulai lunak dalam kontrol saat ini dapat direalisasikan dengan membatasi arus loop umpan balik saat memulai sumber.
Contoh: soft start dengan batasan arus maksimum. DAC dan komparator C2 membatasi arus puncak minimum, tegangan DAC meningkat perlahan secara terprogram. Ketika Vout mencapai norma, komparator C1 mulai bekerja, dengan gangguan yang darinya Anda dapat memutuskan sirkuit soft start dan batas saat ini (DAC + Comp2).

Gbr.3.3. Pengontrol PWM dengan fungsi soft start.
Perlindungan lonjakan
Menambahkan komparator C2 untuk menganalisis tegangan output akan membantu mematikan modul COG ketika tegangan output meningkat di atas ambang Over Voltage (perlindungan terhadap sirkuit terbuka di beban, lihat gbr. 3.4).
| Kontroler tanpa perlindungan | Pengontrol Tegangan Output |
|---|
 |  |
Gambar 3.4
Demikian pula, dimungkinkan untuk mengatur perlindungan terhadap suhu berlebih, dll.
Batasan siklus tugas maksimum
Sebelumnya, implementasi fungsi seperti itu dipertimbangkan dalam pengontrol PWM dengan kontrol tegangan, untuk opsi implementasi, lihat Gambar 3.1.
Pada pengontrol dengan kontrol saat ini dalam mode normal, PWM output dipicu oleh bagian depan input PWM (referensi), dan diatur ulang dari sinyal umpan balik - pembanding saat ini. Untuk membatasi siklus kerja pulsa output, PWM referensi dapat digunakan, siklus tugas yang dipilih sebagai maksimum, untuk topologi IPS yang dikembangkan. Kemudian, pada penurunan referensi PWM, dimungkinkan untuk secara paksa mereset modul COG (lihat Gambar 3.5).

Gambar 3.5. Pengontrol PWM dengan pulsa output siklus kerja terbatas.
Akses ke sinyal dan diagnostik internal
Sementara Kernel Independent Peripheral membentuk pengontrol PWM dari catu daya switching dan menutup umpan balik dari loop kontrol, inti mikrokontroler memungkinkan fungsi pengukuran, diagnostik dan komunikasi. Mikrokontroler mampu mengukur puncak dan arus rata-rata melalui induktansi, sinyal kompensasi gigi gergaji. Bersama dengan pengukuran parameter waktu, ini memungkinkan inti mikrokontroler untuk melakukan perhitungan matematis dan memperoleh informasi yang tidak tersedia melalui pengukuran langsung.
Dengan menggunakan voltase kesalahan yang diukur Verr, PRG, dan IL_min, arus ILpeak dan IL_avg dapat dihitung.
Pengukuran Siklus Tugas dan pengetahuan IL_avg memungkinkan Iin_avg dan Iout_avg dihitung. Dengan menggunakan Vin, Vout, Iin_avg, Iout_avg, Anda dapat mengevaluasi daya dan efisiensi sumber daya.
Antarmuka komunikasi memungkinkan kontrol eksternal, transfer data, dan informasi diagnostik. Sumber daya perangkat lunak memungkinkan Anda untuk mengimplementasikan tumpukan protokol komunikasi.
Sebagai contoh, mikrokontroler dapat digunakan dalam sistem pembangkit listrik dari sumber alternatif dengan baterai penyimpanan tanpa menggunakan microchip khusus untuk konverter energi. Untuk aplikasi semacam ini, konversi energi dan pengisian baterai dikendalikan oleh mikrokontroler. Fungsi untuk menemukan titik energi maksimum (MPPT) dalam konverter surya dan protokol komunikasi diimplementasikan dalam perangkat lunak. Antarmuka interaksi pengguna diimplementasikan melalui port input / output mikrokontroler. Dengan demikian, banyak fungsi dari sistem semacam itu dapat diimplementasikan pada mikrokontroler tunggal (lihat Gambar 3.6), dan tidak menggunakan beberapa mikrokontroler dan MK.

Gambar 3.6.
Independen dari periferal inti memungkinkan Anda untuk melakukan sejumlah fungsi lainnya: membatasi arus atau mematikan sumber selama panas berlebih, mengubah mode operasi dengan arus terputus-putus menjadi arus terus menerus, dll. (mengolesi) spektrum interferensi sumber.
Implementasi pengontrol PWM pada periferal MK terlepas dari inti untuk implementasi satu-tahap atau kanal-tunggal IIP dibahas di atas.
Keluarga mikrokontroler PIC16F176x / 177x memiliki hingga 4 set periferal dari jenis yang sama, masing-masing dapat digunakan dalam pembangunan konverter energi. Dengan demikian, pengontrol dari keluarga-keluarga ini dapat menjadi inti dari multi-channel atau multi-stage IIP dan konverter energi.
Program mikrokontroler
IIP dengan implementasi pada periferal independen dari inti secara praktis tidak memerlukan intervensi dari inti mikrokontroler. Tugas mikrokontroler direduksi menjadi konfigurasi awal periferal, setelah itu fungsi / modul bekerja secara mandiri oleh sinyal umpan balik. Pengontrol mungkin memerlukan partisipasi minimal dalam memproses dan mengubah algoritma interaksi perifer, misalnya, selama awal yang lunak, mengubah parameter keluaran sumber, mengatasi kondisi darurat, dll.
Oleh karena itu, inti dan program mikrokontroler dapat melakukan sejumlah fungsi yang melekat - kontrol, menyediakan antarmuka dengan peralatan kontrol, indikasi mode, dll.
Di situs web Microchip Anda dapat menemukan implementasi antarmuka PMbus, DALI, DMX, yang banyak digunakan dalam berbagai sistem dengan konverter energi.
Debugging
Untuk men-debug sistem, tidak perlu memulai dengan tata letak unit daya. Untuk beberapa tugas, sumber daya dan periferal MC memungkinkan untuk membentuk logika kontrol konverter dan mengemulasi sinyal umpan balik dari topologi konverter output.
| topologi | skema |
|---|
 | 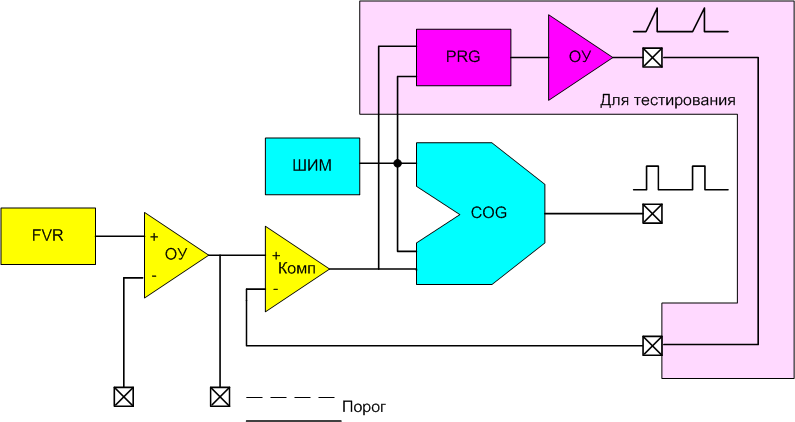 |
Gambar 3.7. Contoh pembentukan sinyal gigi gergaji untuk men-debug pengontrol PWM dengan mengukur nilai arus puncak.
| skema | bagan |
|---|
 |  |
Gambar 3.8. Contoh pembentukan sinyal gigi gergaji untuk men-debug pengontrol PWM dengan mengukur nilai puncak arus dan mendeteksi arus nol dalam induktansi.
Ringkasan
Kemampuan untuk mengkonfigurasi periferal secara fleksibel memungkinkan untuk menggunakan MC aplikasi umum yang sama dalam berbagai tugas, termasuk pembuatan pengontrol PWM untuk konverter energi.
Periferal yang terlepas dari inti menarik dalam dan dari dirinya sendiri, tetapi manfaat terbesar dapat datang dari kemungkinan sintesis blok fungsional, yaitu. berbagi beberapa modul periferal untuk memecahkan masalah tertentu. Dalam hal ini, kecepatan clock, kecepatan, dan kedalaman bit core berjalan di sisi - bagian perangkat keras melakukan fungsi khusus, dan kernel terlibat dalam dukungan perangkat lunak produk.
Literatur yang digunakan dan direkomendasikan untuk studi:
- Situs web Microchip: http://www.microchip.com/promo/dspic33-gs-digital-power
- Sel logika yang dapat dikonfigurasi dalam PIC mikrokontroler https://geektimes.ru/post/278718/
- Port I / O mikrokontroler microchip. https://geektimes.ru/post/279374/
- TB3119. Ringkasan Teknis Generator Output Pelengkap. www.microchip.com
- Dinamika dan Kontrol Sistem Elektronik Berpindah. Bab 2. Modulasi Lebar-Pulsa http://www.springer.com/978-1-4471-2884-7
- TB3155. Multiphase Interleaved PWM Controller dengan Emulasi Diode Menggunakan Mikrokontroler PIC 8-Bit. www.microchip.com
- TB3153. Fungsi Sampel Diimplementasikan dengan Generator Jalan yang Dapat Diprogram. www.microchip.com
- Keith Billings, Taylor Morey. BUKU PEDOMAN DAYA SAING SWITCHMODE
- Marty Brown. Cookbook Catu Daya.
- AN2122. Flyback SMPS Menggunakan Mikrokontroler sebagai Unit Kontrol. http://www.microchip.com
- 20097 PC7. Merancang Konverter Daya Cerdas Menggunakan Core Independent Peripherals (CIPs)
Pelatihan Microchip MASTERs 2016. - AN2456. Konfigurasi dalam Mode Sakelar Power Supply Controller. http://www.microchip.com