Fiksi ilmiah penuh dengan robot terbang. Ada juga robot humanoid terbang yang diciptakan menurut gambar manusia. Ini adalah mesin otonom, dan exoskeleton, yang dikendalikan dari dalam, seperti Iron Man. Namun dalam kenyataannya, kami belum melihat robot seperti itu. Ada multicopter, tetapi mereka tidak bisa berjalan di tanah, seperti orang. Insinyur dari Institut Teknologi Italia memutuskan untuk memperbaiki kekurangan ini - mereka mengembangkan
arsitektur robot humanoid terbang iCub dengan empat mesin jet dan sistem kontrol untuk itu.
Ini adalah salah satu robot pertama di dunia yang mampu terbang, berjalan, dan memanipulasi objek, yaitu menangkap mereka dengan manipulator.
Robot humanoid secara tradisional dianggap sebagai mesin terestrial yang bergerak di permukaan. Tetapi para ilmuwan Italia yakin bahwa jika Anda menambahkan mesin jet ke robot semacam itu, maka ruang lingkup penggunaannya akan meluas secara signifikan, karena ia akan memiliki lebih banyak derajat kebebasan. Jika kita membandingkan dengan kendaraan udara tak berawak tradisional, maka mereka kadang-kadang juga dilengkapi dengan manipulator yang dapat menangkap objek, tetapi sekali lagi, robot humanoid memiliki keunggulan dibandingkan mereka, karena dapat berjalan di tanah. Ini meningkatkan keandalan dan efisiensi energi sistem.
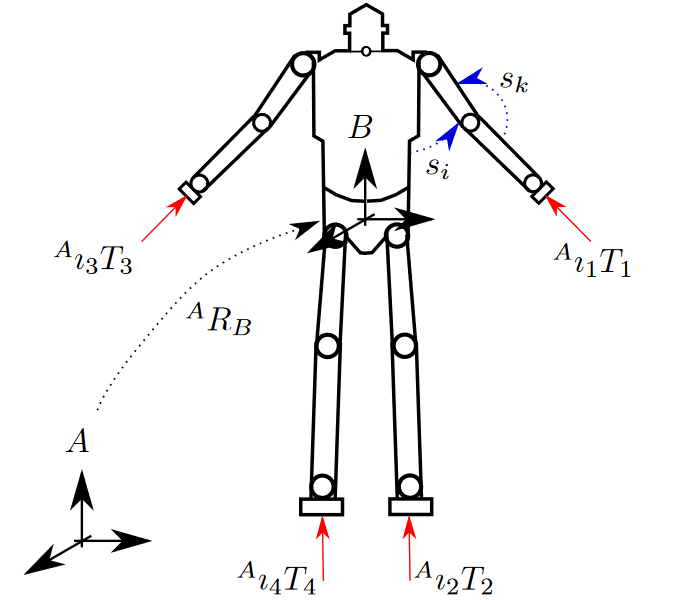
Dalam proyek Institut Teknologi Italia, empat mesin jet dipasang pada efektor terminal, yaitu, "lengan" dan "kaki" robot. Susunan mesin ini tampaknya sedikit tidak wajar, tetapi pada kenyataannya, rangkaian multimodal telah diuji dalam desain lain. Insinyur mengatakan bahwa ini memungkinkan Anda untuk menstabilkan lintasan yang dihitung relatif terhadap pusat massa, dengan mempertimbangkan penyimpangan kecil dalam orientasi kerangka dukungan robot.
Perkembangan Italia masih jauh dari implementasi praktis. Para pengembang menyebutnya "langkah pertama untuk membuat robot humanoid terbang" dan itu benar-benar hanya langkah pertama. Apa yang dilakukan para insinyur adalah mengembangkan kerangka kerja dasar untuk mengendalikan
simulasi robot iCub selama gerakan diam di udara dan gerakan halus. Dorongan mesin juga dihitung dalam program simulasi dan diperhitungkan dalam perhitungan sistem kontrol. Karya ini membuktikan bahwa pembuatan robot semacam itu dan kontrolnya secara
teori dimungkinkan, meskipun pengembang tidak memperhitungkan efek aerodinamis dan faktor-faktor lain yang dapat memanifestasikan diri dalam pengoperasian praktis robot. Semuanya akan memiliki waktu - baik perhitungan maupun percobaan pertama dengan penerbangan sungguhan nanti, tetapi sekarang tugasnya adalah memastikan bahwa secara teori dimungkinkan untuk mengontrol pergerakan mekanisme semacam itu di udara.
Video menunjukkan bagaimana robot membeku di satu tempat, dan juga menghitung lintasan yang diinginkan untuk pusat massa.
Salah satu pengembang iCub, Daniele Pucci, mengatakan kepada
IEEE Spectrum bahwa ia memiliki ide untuk membuat robot seperti itu empat tahun lalu ketika ia pindah untuk bekerja di Institut Teknologi Italia. Kemudian dia berpikir tentang bagaimana menerapkan perkembangannya di bidang kontrol UAV untuk robot dengan berbagai "bagian tubuh", yaitu, bukan tubuh yang sepenuhnya kaku.
Daniele Pucci percaya bahwa robot terbang tipe humanoid memiliki banyak keunggulan dibandingkan multicopters konvensional yang dilengkapi dengan manipulator robot. Yang terakhir ini sering mengalami masalah dalam cuaca berangin, karena mereka tidak dapat berdiri dengan kuat di tanah, dan karenanya memerlukan kontrol yang lebih tepat ketika mencoba untuk menangkap objek yang diam. Selain itu, robot humanoid memiliki dua manipulator, dan bukan satu, yang selanjutnya menyederhanakan tugas.
Keuntungan lain adalah sosial. Di masa depan, robot semacam itu memang dapat digunakan sebagai exoskeleton bagi manusia, dalam citra Iron Man. Contoh dari
Richard Browning yang menarik kerangka luar menunjukkan bahwa penemuan semacam itu akan diminati - bahkan, siapa di antara kita yang tidak ingin terbang dalam kasing besi dengan mesin jet?
 Richard Browning berdiri satu meter di atas tanah
Richard Browning berdiri satu meter di atas tanahArtikel ilmiah ini
diterbitkan pada 16 Februari 2017 di situs pracetak arXiv.org (arXiv: 1702.06075) dan diserahkan untuk publikasi dalam jurnal
IEEE Robotics and Automation Letters .