50 tahun yang lalu, drone kapal selam pertama terjangkau hanya untuk militer dan untuk pertama kalinya "menyala" untuk memperbaiki skandal internasional dengan biaya berapa pun.
Kemudian teknologi bermigrasi ke layanan taipan minyak dan gas untuk pembangunan dan pemeliharaan platform penghasil laut.
Tonggak berikutnya adalah pencarian Titanic (tetapi pada kenyataannya itu adalah pengintaian bawah air yang disamarkan). Namun demikian, ekspedisi ini membawa banyak manfaat untuk tujuan sipil dan ilmiah.
Untuk menarik kaum muda ke industri, pada tahun 1998, Amerika mulai mengadakan kompetisi siswa internasional, dan pada tahun 2013 Kejuaraan Terbuka Asia di Singapura dimulai.
Harga masuk ke industri secara bertahap menurun: pada awalnya hanya ada anggaran militer, kemudian perusahaan minyak datang, diikuti oleh universitas, dan akhirnya, proyek sumber terbuka bernilai lebih dari $ 500 untuk "startup garasi" muncul di tempat kejadian. Dan sekarang bahkan ada perancang DIY drone bawah air untuk siswa.
 Isi1. Saat mencari bom termonuklir di dasar laut Spanyol2. platform minyak laut3. "Titanic" dan intelijen bawah air rahasia4. Kompetisi internasional: AS dan Singapura5. Proyek sumber terbuka, crowdsourcing dan perancang untuk siswa6. Prestasi tim mahasiswa Rusia
Isi1. Saat mencari bom termonuklir di dasar laut Spanyol2. platform minyak laut3. "Titanic" dan intelijen bawah air rahasia4. Kompetisi internasional: AS dan Singapura5. Proyek sumber terbuka, crowdsourcing dan perancang untuk siswa6. Prestasi tim mahasiswa RusiaCari bom termonuklir
Bom termonuklir B28RI, dinaikkan dari kedalaman 869 meter.Kecelakaan pesawat di atas Palomares .Majalah Time memasukkan insiden itu dalam daftar bencana nuklir paling serius.
Pada 17 Januari 1966, seorang pembom strategis Amerika B-52G dengan senjata termonuklir di atasnya bertabrakan dengan pesawat tanker KC-135 saat mengisi bahan bakar di udara. Akibat bencana itu, 7 orang tewas dan empat bom termonuklir hilang. Tiga dari mereka mendarat di darat dan ditemukan segera, yang keempat, yang jatuh ke laut - hanya setelah pencarian dua bulan.
Tim pencarian termasuk ahli selam Kapten Willard Searle dan ahli matematika, Dr. John Craven, yang, menggunakan
teori Bayesian tentang menemukan benda yang hilang secara efektif, membuat rencana pencarian.
 Kerang dua bom termonuklir B28 dari Palomares.
Kerang dua bom termonuklir B28 dari Palomares.Untuk melakukan operasi pencarian, skuadron Angkatan Laut AS dibentuk dari 34 kapal yang mengangkut lebih dari tiga ribu pelaut dan kontraktor sipil. Untuk mempelajari dasar pada kedalaman dangkal hingga 24 meter, penyelam digunakan; penyelam berjas keras bekerja di kedalaman hingga 120 meter. Pencarian di kedalaman sangat dalam dilakukan oleh Alvin dan Aluminaut yang menggunakan kendaraan bawah laut.
 Alvin - salah satu kendaraan bawah air berawak yang beroperasi paling terkenal (PAP). Bathyscaphe dirancang untuk tiga orang (dua ilmuwan dan pilot) dan memungkinkan Anda untuk menyelam hingga kedalaman 4500 meter dalam 10 jam.Aluminaut kapal selam aluminium pertama di dunia, 1964. Ngomong-ngomong, Jacques Cousteau kemudian mengendarainya.
Alvin - salah satu kendaraan bawah air berawak yang beroperasi paling terkenal (PAP). Bathyscaphe dirancang untuk tiga orang (dua ilmuwan dan pilot) dan memungkinkan Anda untuk menyelam hingga kedalaman 4500 meter dalam 10 jam.Aluminaut kapal selam aluminium pertama di dunia, 1964. Ngomong-ngomong, Jacques Cousteau kemudian mengendarainya.Bom itu ditemukan oleh Alvin pada kedalaman hampir 800 meter. Bom itu terletak di lereng sesar 70 derajat, kedalamannya mencapai 1.300 meter. Upaya pertama untuk mengangkatnya, dilakukan pada tanggal 26 Maret, mengikat kabel ke parasut, tidak berhasil. Bom itu jatuh dan hilang lagi. Ditemukan pada 2 April. Pada tanggal 5 April, ada situasi darurat yang serius, ketika Alvin menjadi terjerat dalam parasut, pilot perangkat kehilangan penglihatan dan tidak dapat dilepaskan selama 15 menit.
Perangkat yang dikendalikan dari jarak jauh, yang dapat dikendalikan oleh Undersea Recovery Vehicle (CURV).Setelah kejadian ini, peralatan tak berpenghuni CURV yang dikendalikan dari jarak jauh digunakan untuk pekerjaan lebih lanjut. Pada tanggal 7 April, dengan bantuan perangkat, dimungkinkan untuk memasang dua kabel ke parasut, tetapi ketika mencoba untuk memulai kabel ketiga, CURV juga bingung dan kehilangan kendali. Upaya untuk membebaskannya berakhir dengan kegagalan, dan diputuskan untuk menaikkan bom dengan peralatan di dua kabel. Upaya itu berhasil, dan bom diangkat ke dek kapal penyelamat Petrel 81 hari setelah kecelakaan itu.
Menurut New York Times, ini adalah demonstrasi publik pertama dari senjata nuklir.Militer terus berkembang di bidang perangkat yang dikendalikan dari jarak jauh dan otonom. Sementara itu, industri minyak telah memperhatikan teknologi.
Melayani platform industri dan produksi minyak dan gas

“Kendaraan bawah air tak berpenghuni yang dikendalikan dari jarak jauh” (TNPA, ROV) mulai mendapatkan popularitas pada 1980-an, ketika sebagian besar pengembangan minyak dan gas lepas pantai baru melebihi kemampuan penyelam. Tetapi pada pertengahan 80-an, industri laut TNLA menderita stagnasi parah dalam pengembangan teknologi, terutama disebabkan oleh penurunan harga minyak dan penurunan ekonomi global.
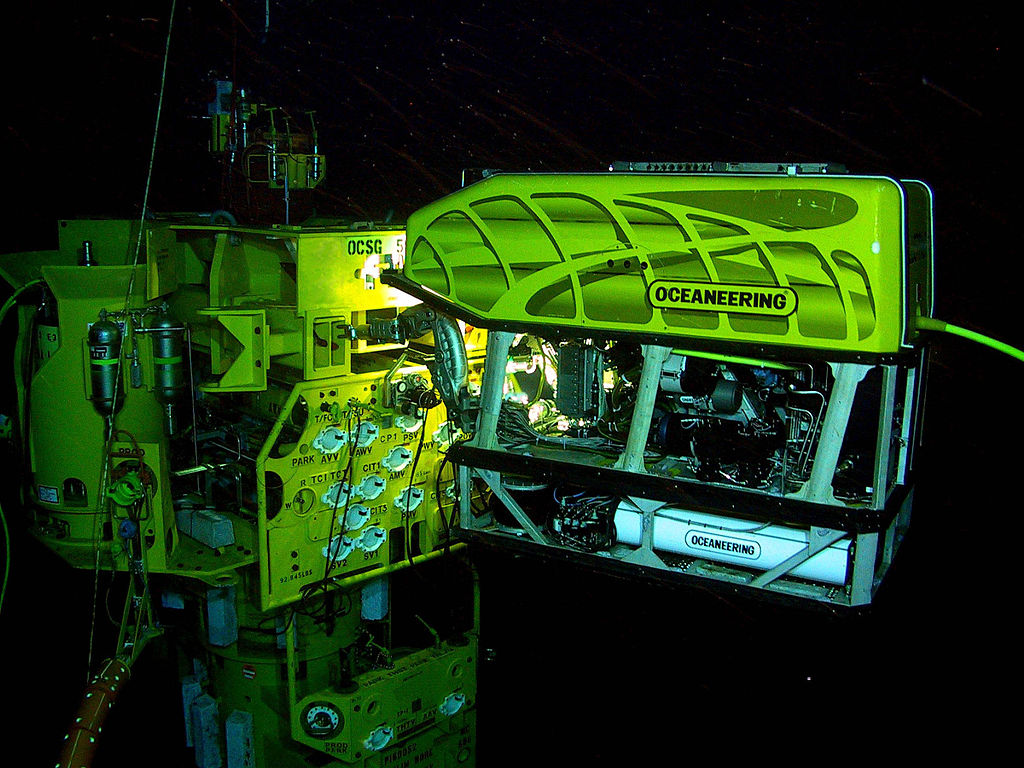 ROV beraksi di ladang minyak dan gas bawah laut. TNPA mengubah kacang pada struktur bawah air.
ROV beraksi di ladang minyak dan gas bawah laut. TNPA mengubah kacang pada struktur bawah air.TNLA seperti ini banyak digunakan dalam produksi lepas pantai. Teknologi baru memungkinkan robot untuk menyelam lebih dalam.
Di sini, omong-omong, adalah video legendaris hiu yang menggigit kabel bawah air:
Titanic

Titanic tenggelam pada 15 April 1912. Upaya untuk menemukannya dilakukan pada 1953, 1966, 1970, dan 1980. (Baca lebih lanjut di
sini .)
Menurut faktur, koleksi perhiasan bernilai sekitar $ 300 juta diangkut di Titanic. Selain itu, di atas kapal itu ada yang asli dari batu delima Omar Khayyam, serta mumi putri Mesir kuno.
Robert Ballard menemukan Titanic pada tahun 1985. Meskipun "ekspedisi" ini hanyalah kedok. Operasi ini didanai oleh Angkatan Laut AS untuk intelijen rahasia dua kapal selam nuklir USS Scorpion dan USS Thresher yang tenggelam pada 1960-an, bukan Titanic. Kapal selam tenggelam masing-masing pada tahun 1963 dan 1968, dan pasukan angkatan laut ingin mengetahui apakah ada kebocoran radiasi.
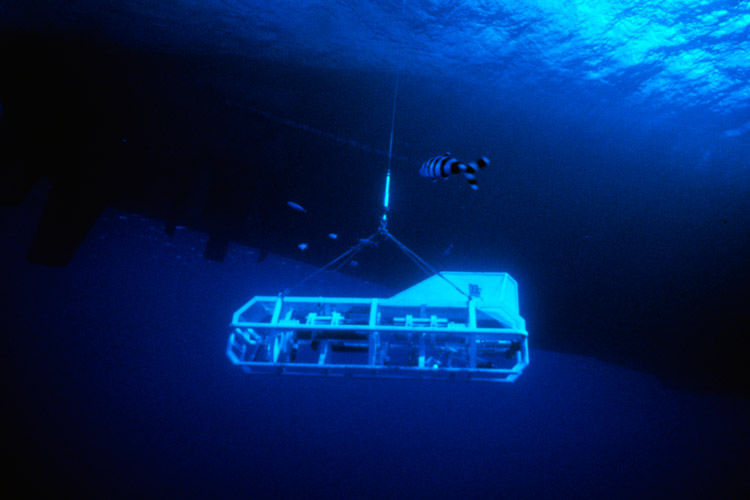
ANGUS adalah sekelompok kamera video dan kamera yang ditarik oleh kapal di bawah air menggunakan kabel:
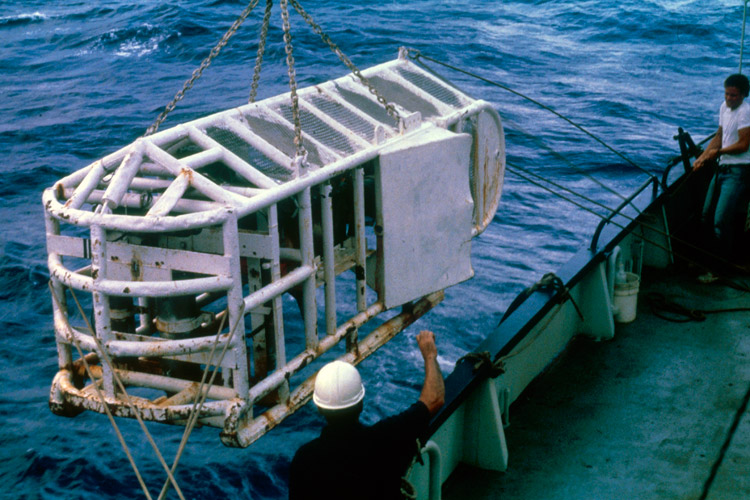 ANGUS (Survei Bawah Air Geologis yang Bergerak Akustik). Perangkat ini memiliki kelemahan: itu tidak cukup efisien. Rekaman itu dapat dikembangkan dan dipelajari hanya setelah peralatan diangkat ke permukaan.
ANGUS (Survei Bawah Air Geologis yang Bergerak Akustik). Perangkat ini memiliki kelemahan: itu tidak cukup efisien. Rekaman itu dapat dikembangkan dan dipelajari hanya setelah peralatan diangkat ke permukaan.Pembuat perangkat ini masih lucu. Para insinyur dengan penuh kasih sayang menyebut perangkat itu "orang bodoh di atas tali" karena kurangnya cara paling sederhana untuk mengendalikannya. Slogan tim ANGUS adalah ungkapan "Meskipun bocor, terus berdetak."
 Argo, seperti ANGUS, adalah struktur logam yang dilengkapi dengan lima kamera video dan dua sistem sonar.
Argo, seperti ANGUS, adalah struktur logam yang dilengkapi dengan lima kamera video dan dua sistem sonar.Pada 1 September 1985, monitor yang terhubung ke kamera video Argo menunjukkan benda-benda yang tidak alami. Keesokan harinya, lambung Titanic ditemukan, dan ANGUS dikirim ke bawah untuk fotografi.
Selama empat hari berikutnya, Argo dan ANGUS mengambil ribuan foto. Puing-puing Titanic tersebar di suatu daerah dengan radius 1.600 meter pada kedalaman sekitar 3.800 meter.
Pada 12 Juli 1986, Ballard melakukan ekspedisi kedua ke Titanic. Sekarang ia memiliki kesempatan untuk mandi tiga orang "Alvin" dan robot yang dikendalikan dari jarak jauh Jason Jr.
.jpg) "Alvin" - salah satu kendaraan bawah air berawak yang beroperasi paling terkenal (PAP). Bathyscaphe dirancang untuk tiga orang (dua ilmuwan dan pilot) dan memungkinkan Anda untuk menyelam hingga kedalaman 4500 meter dalam 10 jam.Aparatur "Jason Junior" (Jason Jr)Studi tentang Titanic menggunakan peralatan Jason Junior.
"Alvin" - salah satu kendaraan bawah air berawak yang beroperasi paling terkenal (PAP). Bathyscaphe dirancang untuk tiga orang (dua ilmuwan dan pilot) dan memungkinkan Anda untuk menyelam hingga kedalaman 4500 meter dalam 10 jam.Aparatur "Jason Junior" (Jason Jr)Studi tentang Titanic menggunakan peralatan Jason Junior.Pada tahun 1987, National Geographic Channel mengambil film dokumenter untuk mencari Titanic, James Cameron menontonnya dan terinspirasi untuk membuat karya agungnya sendiri.
Pada bulan September 1995, Cameron secara pribadi melakukan 12 kali penyelaman ke Titanic pada bathyscaphes Mir-1 dan Mir-2 di atas kapal penelitian Rusia, Akademik Mstislav Keldysh, yang juga kemudian terlibat dalam film tersebut.
Film Titanic bernilai lebih dari kapal itu sendiri. Pembangunan kapal menelan biaya 4.000.000 poundsterling, yang dalam uang modern adalah 100.000.000 poundsterling, dan biaya film James Cameron adalah 125.000.000 poundsterling.
Kompetisi internasional
Kompetisi adalah mekanisme permainan yang sangat baik yang menarik kaum muda dan memungkinkan Anda untuk "berorientasi pada karier" banyak spesialis di bidang yang diminati. Munculnya kompetisi internasional merupakan tonggak penting dalam pengembangan drone bawah air dan pembentukan industri dan pasar.
RobosubKompetisi internasional telah diadakan sejak tahun 1998 dan diadakan di Space and Naval Systems Center AS.
Situs web -
www.robonation.org/competition/robosubAturan 2017 (PDF).

Kendaraan bawah air
otonom (AUV) berpartisipasi dalam kompetisi RoboSub dan menyelesaikan misi realistis dalam menuntut lingkungan bawah air.

Didirikan oleh Asosiasi Internasional Pengembang Sistem Kendaraan Tak Berawak, AUVSI Foundation adalah organisasi nirlaba yang memberi siswa kesempatan untuk berpartisipasi dalam kegiatan praktis di bidang robot yang bertujuan merangsang dan mempertahankan minat mereka dalam sains, teknologi, teknik, dan matematika (STEM).

Setiap tahun, Yayasan AUVSI menawarkan sejumlah program pendidikan, serta kompetisi robot, yang memungkinkan siswa untuk menerapkan pendidikan teknis mereka di luar kelas. Acara semacam itu merupakan persiapan ideal untuk kegiatan profesional, oleh karena itu, siswa yang berpartisipasi di dalamnya sering ditawari magang dan pekerjaan yang didambakan sebelum lulus.
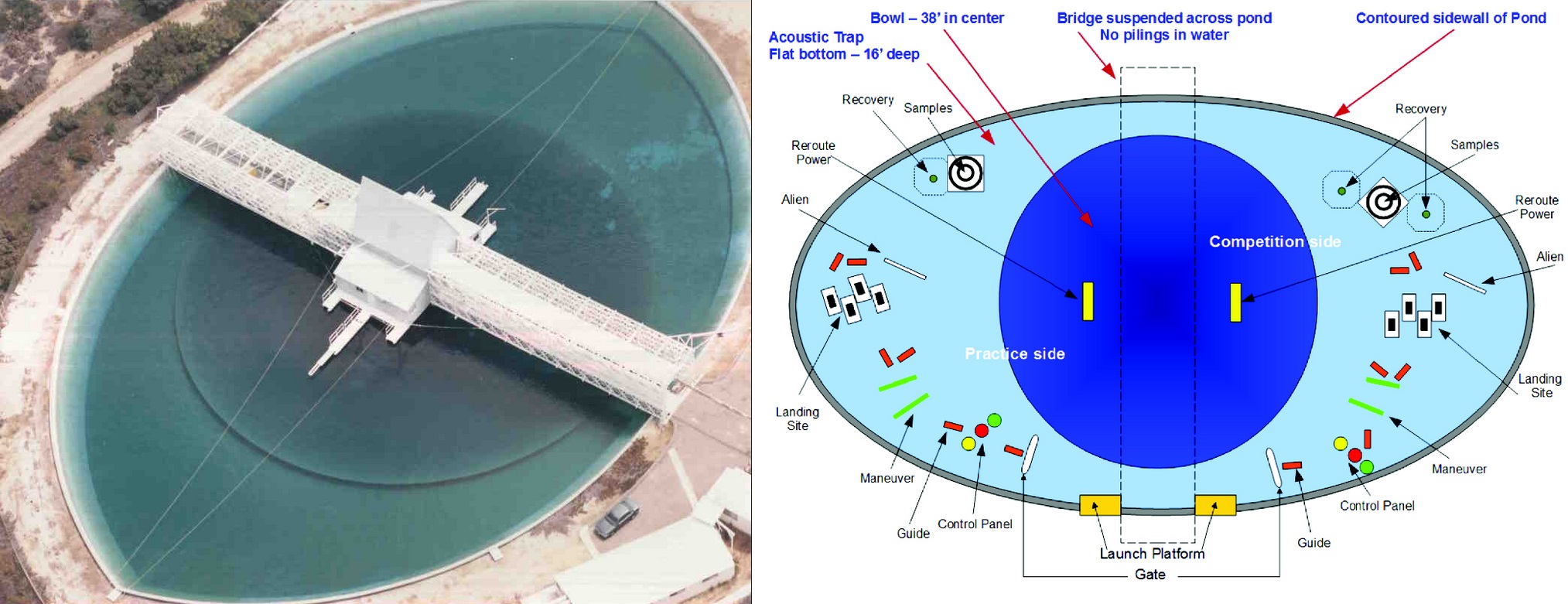
Tantangan AUV Singapura (SAUVC)Singapore AUV Challenge (SAUVC) Membuka Kejuaraan Robotika Bawah Air Asia, kompetisi telah diadakan di Singapura sejak 2013.
Situs web -
www.sauvc.orgHalaman Facebook .
Aturan 2018 .
Beginilah cara kompetitor pada 2013 menggambarkan tugas dengan kata-katanya sendiri:
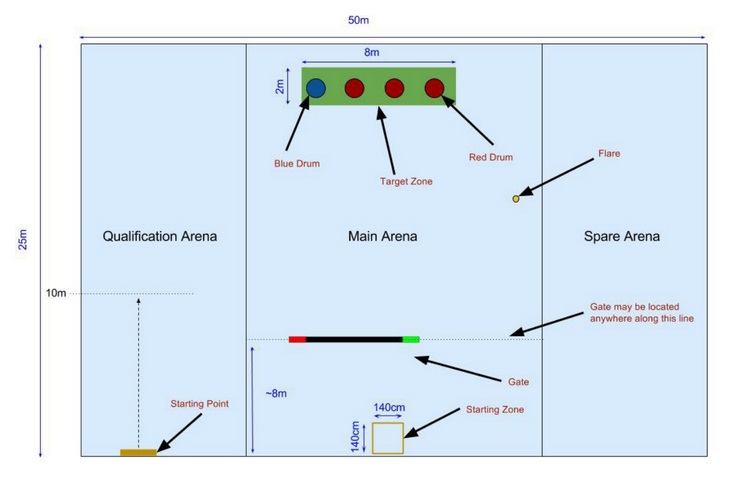
“Tugas tersebut dapat kira-kira digambarkan sebagai berikut: Anda perlu melewati garis hitam di dasar kolam dan pada titik tertentu muncul. Yaitu, robot yang mengikuti garis. Namun, aturannya agak tidak jelas menggambarkan semuanya. Ada beberapa gerbang yang harus Anda lewati. Tetapi jika itu baik untuk melewati strip, maka melalui mereka Anda akan lulus secara otomatis. Ada juga yang berdiri di mana bola berdiri, dan itu harus ditendang. Sekali lagi, jika Anda berjalan jauh di atas strip dan pada ketinggian yang benar, maka pada saat Anda memutar bola Anda akan menendang secara otomatis. Dan Anda harus muncul di tempat yang tepat - ketika bilah hitam berakhir. Secara umum, seluruh kompetisi berputar di sekitar strip hitam di bagian bawah :-). "
Sebuah kisah terperinci tentang 2013 dalam robotika bawah air ada di
sini .

Openrov
Garage Startup adalah awal dari kisah Hewlett-Packard dan Apple, serta banyak proyek Lembah Silikon lainnya. Ketika teknologi tersedia untuk "peretas," mereka mulai bereksperimen sendiri dan menemukan solusi luar biasa.
Pada 2012, proyek OpenROV, robot mini-bawah air yang dikendalikan dari jarak jauh dengan berat sekitar 2,5 kg, diluncurkan di Kickstarter. Itu dikendalikan dari laptop, dilengkapi dengan kamera video dengan lampu latar. Kedalaman pencelupan: hingga 100 meter, masa pakai baterai: ~ 1,5 jam. Ia digerakkan oleh tiga motor tanpa sikat (motor 800Kv Brushless): dua di bidang horizontal dan satu di bidang vertikal. Untuk mendapatkan gambar visual, kamera web konvensional (Microsoft LifeCam HD-5000) digunakan, yang terhubung melalui USB ke BeagleBone.
Kit ini datang dalam bentuk suku cadang yang perlu dirakit. Pengembang proyek menetapkan sendiri tujuan untuk membuat penelitian bawah laut menjadi murah dan dapat diakses oleh semua orang, berdasarkan pada prinsip-prinsip perangkat lunak sumber terbuka dan perangkat keras sumber terbuka. Gambar tersedia di
GitHub .
Performa di TED:
 Papan Beagle digunakan sebagai komputer di papan.Trident 2016 (versi OpenROV berikutnya)
Papan Beagle digunakan sebagai komputer di papan.Trident 2016 (versi OpenROV berikutnya)StartROV OpenROV, AS, menggalang dana untuk membuat Trident underwater telecontrol vehicle (ROV). Perusahaan berencana untuk mengumpulkan $ 50 ribu, tetapi sebaliknya telah menarik lebih dari $ 560 ribu.
OpenROV 2.8 dan Trident DroneRentang kendali hingga 100 meter. Berat - 2,9 kg. Kecepatan maksimum adalah 2 m / s. Daya tahan baterai - 3 jam. Dukungan untuk melayang otomatis dan mempertahankan arah gerakan. Ini dapat dihubungkan ke kacamata realitas virtual untuk kontrol orang pertama.
Gladius 2017Pada 2017,
proyek crowdfunding lain
dari robot bawah laut muncul di situs IndiGoGo.

Kamera video 4k, kedalaman 100 meter, aksi 500 jari, harga 600-1700 dolar.
Desainer untuk anak sekolahMUR - Paket Kompetisi JuniorSkills.
Pengembangan ini disampaikan oleh Sergey Moon dari Vladivostok di pameran RoboMech-2015 di Khabarovsk pada 12 November.
Situs proyek -
murproject.comAtas dasar konstruktor ini, Olimpiade NTI diadakan untuk siswa sekolah menengah dari seluruh Rusia dengan profil
“Sistem Robot Air” .
Pada tahap kualifikasi, perlu untuk menyelesaikan masalah dalam fisika dan ilmu komputer, serta untuk menguasai kontrol robot bawah air pada simulator 3D.
Pada tahap akhir, tugas lebih menarik:
- perakitan dua robot bawah air dari perancang (perancang MUR diusulkan);
- kedua robot harus menempuh jarak, dipandu oleh objek bawah air. Tetapi hanya satu robot yang dilengkapi dengan kamera, yang kedua harus menerima sinyal dari robot pertama;
- pengembangan perangkat komunikasi mereka sendiri antara robot, menggunakan komponen yang diusulkan dan memiliki akses ke protokol dan sirkuit listrik perancang;
- organisasi komunikasi antar robot.
Kembali pada tahun 2017, Olimpiade "Sistem Robot Cerdas Air" diadakan di Innopolis. (Peraturannya ada di
sini .)
Rusia, Vladivostok
Saya sangat senang mengetahui bahwa tim pengembangan drone bawah air dari kota saya dan universitas saya
(Far Eastern Federal University - FEFU) sangat keren.
 Sejak 2012, tim robotika gabungan dari Universitas Federal Timur Jauh dan Cabang Timur Jauh dari Akademi Ilmu Pengetahuan Rusia setiap tahun menjadi pemenang hadiah di kelas robot otonom di turnamen dunia RoboSub dan Singapore AUV Challenge Asian Championships.
Sejak 2012, tim robotika gabungan dari Universitas Federal Timur Jauh dan Cabang Timur Jauh dari Akademi Ilmu Pengetahuan Rusia setiap tahun menjadi pemenang hadiah di kelas robot otonom di turnamen dunia RoboSub dan Singapore AUV Challenge Asian Championships.Dan inilah Junior, robot yang dengannya tim Vladivostok
menangkap kedalaman kolam dan memenangkan hadiah.
 Robosub
Robosub2012 - Posisi Ke-5 (FEFU, Vladivostok)
2013 - Posisi Ketiga (FEFU, Vladivostok)
2014 - Posisi Keempat (FEFU, Vladivostok)
2015 - Juara 3 dan 6 (Universitas Maritim dinamai Nevelsky dan FEFU, Vladivostok)
2016 - tempat ke-4 (Universitas Maritim dinamai Nevelsky, Vladivostok)
2017 - Posisi Kedua (FEFU, Vladivostok)
Singapura tantangan AUV2013 - Juara 1 (FEFU, Vladivostok)
2015 - Posisi Kedua (FEFU, Vladivostok)
2016 - Posisi Kedua (FEFU, Vladivostok)
2017 - Juara 1 (FEFU, Vladivostok)
Saya akan menulis tentang tim Vladivostok (wawancara dengan pengembang, karakteristik kinerja robot, dll.) Dan tentang aturan kompetisi internasional dalam edisi berikutnya.Sumber
- Kecelakaan pesawat di Palomares , Wikipedia
- Palomares. Bom hidrogen di pantai , TopWar
- Perendaman total: bagaimana penggunaan robot untuk mencari Titanic telah mengubah pendekatan penelitian bawah laut , T&P
- Cara yang tidak biasa untuk mengangkat "Titanic": versi ilmuwan , RIA Novosti
- Robert Bollard menjelajahi lautan , TED
- Jalan James Cameron , Wired, Geektimes
- James Cameron: Sebelum Avatar ... bocah yang penasaran , TED
- Robosub
- Musim Robo 2013: dari bawah air ke langit , Geektimes
- OpenRov , Wikipedia
- OpenROV - Robot Bawah Air (open source) , Habrahabr
- David Lang: Robot Bawah Air Saya , TED
- Drone kapal selam OpenROV Trident , Geektimes
- Desainer untuk siswa Micro Underwater Robot Edu
- Olimpiade NTI: Sistem Robot Air