 Carcraft, perangkat lunak untuk membangun dunia virtual
Carcraft, perangkat lunak untuk membangun dunia virtualDi sudut kampus Alphabet, ada tim yang mengerjakan perangkat lunak yang bisa menjadi kunci untuk membuat robomobiles. Tidak seorang jurnalis pun yang pernah melihatnya sebelumnya. Mereka menyebutnya Carcraft, setelah game populer World of Warcraft.
Pencipta perangkat lunak, seorang insinyur muda dengan rambut acak-acakan dan wajah anak laki-laki, James Stout, duduk di sebelah saya di ruang kantor terbuka, di mana keheningan memerintah dan semua orang menggunakan headphone. Layar memperlihatkan bagian jalan virtual dengan gerakan memutar. Tidak ada yang menarik perhatian - gambar sederhana dari beberapa garis dan latar belakang dengan tekstur jalan. Kita melihat mobil robot Chrysler Pacifica resolusi menengah dan kerangka gambar sederhana yang mewakili kendaraan lain.
Beberapa bulan yang lalu, tim pengembangan menemukan gerakan melingkar di Texas. Kecepatan dan kerumitan situasi jalan membuat mobil berada pada posisi yang sulit, sehingga tim memutuskan untuk membangun bagian jalan dengan konfigurasi yang sama di lokasi pengujian. Dan saya sudah melihat tahap ketiga dari proses pelatihan: mendigitalkan mengemudi nyata. Di sini, satu-satunya manuver pengemudi dari dunia nyata - misalnya, mobil yang memotong Anda dalam gerakan memutar - dapat diubah menjadi ribuan skenario simulasi yang menyelidiki batas-batas kemampuan mobil.
Skenario seperti itu membentuk dasar dari alat simulasi yang kuat. “Sebagian besar pekerjaan pada fitur baru dimotivasi oleh apa yang kami lihat dalam simulasi,” kata Stout. Alat ini mempercepat pengembangan kendaraan robot di Waymo, yang didirikan oleh Alphabet (girlly Google) dari unit penelitian X pada bulan Desember 2016.
Jika Waymo dapat membuat mobil yang sepenuhnya otonom dalam beberapa tahun ke depan, Carcraft harus diingat sebagai dunia virtual yang memainkan peran penting dalam mengubah dunia nyata tempat ia diciptakan.
Awalnya, itu dirancang untuk menelusuri adegan yang ditemui oleh mobil saat bepergian di jalan umum. Sekarang Carcraft, dan secara umum semua simulasi, memainkan peran yang semakin meningkat dalam pengembangan kendaraan robot.
Di setiap titik waktu, sekitar 25.000 robot virtual bajak versi Austin, Mountain View dan Phoenix yang dimodelkan sepenuhnya, serta beberapa trek uji. Waymo dapat memainkan simulasi perjalanan di sepanjang jalan yang sangat sulit, ratusan ribu kali sehari. Secara total, di dunia virtual, mobil melaju hingga 8 juta mil per hari. Pada 2016, mereka melakukan perjalanan 2,5 miliar mil virtual, dibandingkan dengan hanya 3 juta mil yang ditempuh oleh prototip Google asli dari Google di jalan nyata. Dan, yang terpenting, miles virtual fokus pada apa yang oleh karyawan Waymo disebut sebagai jalan "menarik" tempat mobil dapat mempelajari sesuatu yang baru. Bukan hanya bermil-mil di jalan raya dalam perjalanan menuju tempat kerja.
Simulasi adalah bagian dari proses rumit yang dikembangkan oleh Waymo. Mereka dengan erat menghubungkan jutaan mil yang digerakkan oleh mobil mereka di DOP dengan program "inspeksi struktural" yang mereka habiskan di pangkalan rahasia Zamok di Lembah Tengah.
Sejauh ini, Waymo belum mengungkapkan sistemnya kepada dunia. Mil di jalan biasa menunjukkan di mana mobil mereka perlu latihan ekstra. Mereka membangun jalan dari konfigurasi yang diperlukan di Castle, yang memungkinkan mereka memainkan ribuan skenario berbeda tepat di tempat. Dan di salah satu dari dua jenis pemeriksaan, di dunia nyata, mesin mengumpulkan data yang cukup untuk kemudian sepenuhnya menciptakan kembali situasi dalam bentuk digital setiap saat. Di ruang virtual ini, Anda dapat membebaskan diri dari keterbatasan kehidupan nyata dan membuat ribuan opsi untuk skenario apa pun, dan kemudian membuat mobil melewati semuanya. Untuk meningkatkan perangkat lunak yang menggerakkan mobil, itu diunduh kembali ke dalam mobil, yang kemudian melaju di jalan lebih lama dan bahkan kompleksitas yang lebih besar, dan siklus berulang.
Untuk sampai ke Castle, dari Teluk San Francisco, Anda harus pergi ke timur, lalu ke selatan di ke-99, dan kemudian di sepanjang jalan raya Central Valley, pergi ke selatan ke Fresno. Ladang jagung berdekatan dengan pinggiran kota yang sedang tumbuh; cakrawala menghilang di balik kabut pertanian. Ini 30 derajat lebih panas dari San Francisco, dan permukaannya sangat datar sehingga lereng "Laut Bumi" ini, sebagaimana
John McPhee menyebutnya, hanya dapat diukur dengan laser. Anda pindah di dekat kota kecil Etwater, di mana pernah ada Pangkalan Angkatan Udara Castle, tempat 6.000 orang melayani program B-52. Sekarang terletak di perbatasan utara kota kecil Merced, di mana pengangguran pada tahun 2010 mencapai 20%, dan bahkan sekarang jarang di bawah 10%. 40% dari populasi berbicara bahasa Spanyol. Kami melintasi rel kereta api dan memasuki wilayah pangkalan lama seluas 650 hektar, yang sekarang menampung segala macam hal, dari departemen pengendalian satwa liar hingga penjara negara bagian ini.
Navigator saya di telepon tidak mengarahkan saya ke alamat tertentu, tetapi ke koordinat GPS. Kami mengendarai sepanjang pagar hijau yang tinggi dan buram sampai Google Maps memberi tahu Anda saatnya untuk berhenti. Tidak ada yang menunjukkan keberadaan gerbang. Semuanya tampak seperti bagian lain dari pagar, tetapi perwakilan tuan rumah saya terlihat percaya diri. Tiba-tiba, di celah lebar antara gerbang dan pagar, seorang penjaga muncul dan mulai memeriksa dokumen kami.
 Pagar
PagarPagar terbelah, dan kami melaju ke kampus yang ramai. Orang-orang muda dengan celana pendek dan topi berlari kesana kemari. Anda dapat melihat mobil perumahan, garasi kubah, dan di tempat parkir dekat bangunan utama - robomobiles. Berikut adalah beberapa jenis robomobiles - model Lexus yang dapat ditemui penduduk AS di DOP, Prius, pensiunan, dan van Chrysler Pacifica baru.
Robomobiles mudah dibedakan. Mereka dipenuhi dengan sensor. Lebih dari yang lain, pemindai laser (penutup) di atap dikeluarkan. Tapi Pacifica juga memiliki bir kecil seukuran kaleng yang berputar di sekitar kaca spion. Di bagian belakang, mereka dilengkapi dengan radar yang mirip dengan telinga Shrek.
Saat Anda menghidupkan sensor mesin, meskipun tidak bergerak, lidar yang berputar mengeluarkan suara yang aneh. Sesuatu antara lolongan dan dengung, suara ini tidak menyenangkan karena menurut saya hal yang baru dan telinga saya tidak dapat menyaringnya bersama-sama dengan suara-suara lain dari mobil yang saya gunakan untuk tumbuh dewasa.
Mobil yang lebih menarik diparkir di gedung utama. Tanda-tanda X dicetak di atasnya di seluruh tubuh dengan pita merah. Ini adalah mobil tingkat keempat. Level adalah sebutan yang dikembangkan oleh komunitas insinyur mobil yang menggambarkan tingkat otonomi dari sebuah robomobile. Mobil-mobil di jalan yang kita dengar berada di tingkat pertama atau kedua - yaitu, mereka dapat pergi pada kontrol pelayaran "pintar" di jalan raya. Tetapi mobil dengan X merah adalah binatang yang sama sekali berbeda. Tidak hanya sepenuhnya otonom, orang di dalamnya tidak akan dapat mengendarainya - oleh karena itu, mereka tidak ingin mencampurnya dengan mesin lain.
Kami berkendara ke tempat parkir, dan di mana-mana tanda-tanda proyek Manhattan, pos ilmiah, dan teknologi start-up di mana-mana. Di gedung utama, mobil keliling seukuran ruang kelas, saya bertemu dengan tenaga penggerak dari seluruh tempat yang luar biasa ini. Namanya adalah Stef Villegas.
Dia mengenakan blus putih panjang dengan kerah, celana jins yang sangat compang-camping dan sepatu rajutan abu-abu - semuanya sangat modis, sebagai mantan karyawan butik Azalea, dari mana ia ditransfer ke Google, mengikuti. Dia dibesarkan di pinggiran East Bay di sisi lain bukit dari Berkeley dan memperoleh gelar seni dari Universitas California di Berkeley sebelum bergabung dengan Program Pengembangan Robomobile 2011.
"Apakah kamu mengendarai mobil?" Aku bertanya.
“Saya mengemudi sepanjang waktu,” katanya.
Dia menghabiskan waktu berjam-jam naik di Jalan Raya 101 dan 280, berlari dari San Francisco ke Mountain View. Seperti semua pengemudi, ia mengembangkan perasaan tentang bagaimana mobil berperilaku di jalan raya. Dan pengetahuan ini ternyata sangat penting untuk program pengembangan robot rob. Mereka telah mengembangkan ide intuitif tentang apa yang mungkin sulit bagi mesin. "Memeriksa perangkat lunak yang diperbarui dan memiliki posisi permanen dalam tim, saya mulai berpikir tentang tugas kompleks apa yang dapat ditetapkan untuk sistem," katanya.
Maka Villegas dan beberapa insinyur mulai membuat dan menciptakan skenario situasi langka yang memungkinkan mereka untuk menguji perilaku baru alat berat dalam lingkungan yang terkendali. Mereka mulai menempati tempat parkir di seberang
Amphitheatre Pesisir , memasang di pintu masuk orang-orang mereka sehingga hanya orang-orang Google yang tersisa di tempat parkir.
“Semuanya dimulai di sana,” katanya. "Aku dan beberapa pengemudi ada di sana." Kami datang dengan serangkaian ide yang ingin kami uji, memasukkan semua yang kami butuhkan ke dalam truk pickup, dan mengendarainya melalui tempat parkir, membuat cek. ”
Ini adalah bagaimana tes terstruktur pertama muncul dalam program pengembangan robomobile. Ternyata hal yang paling sulit adalah untuk memproses skenario yang tidak rumit yang ditemukan oleh orang-orang, seperti "bahwa jika ada zombie di jalan," tetapi hanya mengemudi dengan percaya diri dan andal dalam varian lalu lintas biasa yang tak ada habisnya.
Villegas mulai mengumpulkan alat peraga dari segala hal yang bisa dia peroleh: boneka, kerucut, tanaman buatan, mainan, skateboard, becak, boneka, bola, segala macam hal. Semua ini masuk ke satu set alat peraga (sebagai hasilnya, mereka mulai menyimpannya di tenda, dan sekarang - di Kastil, di gudang khusus).
 Gudang yang dibutuhkan
Gudang yang dibutuhkanTapi ada masalah. Perlu bahwa mobil melaju lebih cepat, mengenali lampu lalu lintas dan rambu-rambu. Rencana itu terus-menerus mengganggu konser yang diadakan di Amphitheatre. "Ada beberapa kasus seperti: 'Ya, Metallica akan datang, kita harus membuangnya,'" katanya.
Mereka membutuhkan pangkalan rahasia. Kastil itu persis seperti itu. Mereka menandatangani kontrak dan mulai membangun kota impian palsu mereka. "Kami secara khusus membuat jalan-jalan perumahan, jalan raya, jalan buntu, tempat parkir, dan semua itu, sehingga kami mendapatkan pilihan yang representatif dari tempat-tempat khas yang bisa Anda lewati."
Kami pergi dari kantor utama ke mobilnya. Dia memberi saya peta ketika kita melakukan perjalanan lapangan. "Ini seperti Disneyland sehingga Anda dapat menavigasi," katanya. Peta dirancang dengan cermat. Di satu sudut ada lencana bergaya Vegas: "Selamat datang di Kastil Fairytale di California." Berbagai area kampus bahkan mematuhi aturan penamaan. Dalam salah satu yang kita kendarai, setiap jalan dinamai sesuai dengan mobil terkenal (
DeLorean ,
Bullitt ) atau untuk menghormati mobil dari taman pertama berdasarkan Prius, yang ada pada hari-hari awal program (Barbaro).
Kami melewati gedung-gedung merah muda, barak tua, yang salah satunya telah mengalami renovasi - karyawan Waymo beristirahat di sana ketika mereka gagal kembali ke teluk. Selain itu, tidak ada bangunan lain di area pengujian. Ini benar-benar kota untuk robot mobil: segala sesuatu yang penting adalah di trotoar itu sendiri atau berbatasan dengannya.
 "Kota" di Kastil
"Kota" di KastilUntuk seseorang, semua ini terlihat seperti level permainan komputer tanpa karakter. Agak aneh bahwa Anda merasa ketika Anda pindah dari jalan-jalan raya ke jalan-jalan yang tampaknya perumahan dengan jalan masuk semen dan persimpangan pinggiran kota yang tidak memiliki bangunan. Beberapa bagian jalan secara berkala terasa akrab bagi saya.
Kami sedang mendekati lingkaran lalu lintas dua jalur yang besar. Di tengah adalah lingkaran dengan pagar putih. “Bundaran ini muncul di sini secara khusus setelah kami menguji bundaran multi-lajur di Austin, Texas,” kata Villegas. - Awalnya, kami hanya memiliki bundaran satu jalur, dan kami memutuskan: "Baiklah, kami telah menyelesaikan tahap ini." Dan kemudian kami menemukan multiband, dan kagum: 'Wow, kuda dengan warna berbeda! Terima kasih Texas. ' Karena itu, kami telah menciptakan keindahan ini dalam diri kami. ”

Kami berhenti dan Villegas sedang mempertimbangkan satu tambahan baru: dua jalur mobil dan satu jalur sepeda melewati area parkir paralel yang berbatasan dengan halaman. “Saya benar-benar ingin membuat jalan dengan parkir paralel di sini. Ini sering ditemukan di pinggiran kota. Walnut Creek. Mountain View. Palo Alto, ”katanya. - Orang keluar dari toko atau dari tempat parkir. Orang-orang berjalan di antara mobil, menyeberang jalan dengan barang-barang di tangan mereka. " Strip itu adalah bagian dari ingatannya, yang diwujudkan dalam aspal dan beton, yang kemudian akan berubah menjadi bentuk yang lebih abstrak, untuk meningkatkan kemampuan robot untuk memproses medan yang sudah dikenalnya.
Dia membawa saya kembali ke kantor utama, dan kami naik ke robot van, salah satu Chrysler Pacificas. Sopir kami adalah Brandon Kane. Asistennya di kursi penumpang akan memantau perilaku mobil di laptop menggunakan program XView.
Sekelompok asisten, yang mereka sebut "rubah," bekerja dengan mereka - julukan telah tumbuh dari kata "buatan" [rubah - rubah, imitasi - buatan / kira-kira. diterjemahkan.]. Mereka mengendarai mobil, menciptakan lalu lintas, bermain pejalan kaki, mengendarai sepeda, memegang rambu berhenti. Ini adalah aktor yang audiensnya adalah mobil.
Pemeriksaan pertama kami adalah jalur dan pemotongan sederhana, tetapi dengan kecepatan tinggi. Dalam hal ini, jaraknya 70 km / jam. Kami berkendara lurus di sepanjang jalan lebar yang mereka sebut Autobahn.
Ketika rubah memotong kami, mesin Waymo mengerem dan tim memeriksa indikator utama dalam kasus ini: pengereman. Mereka berusaha menciptakan situasi di mana mobil akan perlu mengerem dengan tajam. Seberapa tajam? Di suatu tempat antara "neraka, saya tidak punya waktu untuk lampu lalu lintas" dan "Saya berkeringat tajam dan telepon terbang turun dari kursi".
Saya akan mengatakan hal yang aneh: ini bukan perjalanan pertama saya ke robomobile. Di masa lalu, saya mengendarai dua kali dalam dua robomobiles yang berbeda: pertama kali pada Lexus SUV yang mengantarkan saya di sepanjang jalan-jalan Mountain View, dan yang kedua di mobil Google Firefly kecil yang naik di atap gedung Google. Ini adalah perjalanan biasa, yang, pada kenyataannya, semua orang ingin.
Sekarang semuanya berbeda. Dua mobil yang bergerak cepat, salah satunya harus memotong kami dengan cukup tajam.
Saatnya memulai. Kane menyalakan mobil, dan setelah bunyi bip mobil berkata: "Otomatis." Mobil lain mendekati kami dan memotong kami sebagai pengemudi Porsche, berusaha menjadi yang pertama yang berkendara ke pintu keluar. Kami mengerem dengan kuat, cepat dan lancar. Saya terkesan.
Mereka memeriksa data pengereman dan memahami bahwa kami tidak cukup mengerem. Saya harus mengulanginya. Dan lagi, dan lagi ... Mobil kedua memotong kita pada sudut yang berbeda, dengan cara yang berbeda. Mereka menyebutnya "dapatkan liputan."
 Bangun kembali dengan kecepatan tinggi. Salah satu mobil itu otonom.
Bangun kembali dengan kecepatan tinggi. Salah satu mobil itu otonom.Kami sedang melakukan tiga pemeriksaan lagi - membangun kembali dengan kecepatan tinggi, bertemu dengan mobil yang melaju mundur dari gang tiga blok dari kami, dan berhenti dengan mulus saat melihat bola basket yang meluncur ke jalan. Setiap manuvernya mengesankan dengan caranya masing-masing, tapi saya ingat tes dengan yang paling banyak memotong.
Ketika kita pergi ke restart, Kane bergerak ke kursi. "Sudahkah kau menyaksikan
Lingkar Pasifik ?" Dia bertanya padaku. - Film Guillermo del Toro, tempat orang menyinkronkan aksi dengan robot raksasa untuk melawan monster. Saya mencoba menyinkronkan tindakan dengan robomobile. Kami memiliki beberapa pemikiran umum. "
Saya memintanya untuk menjelaskan apa maksudnya. "Saya mencoba beradaptasi dengan perbedaan berat karena orang-orang hadir di dalam mobil," katanya. - Aku menghabiskan banyak waktu di mobil dan aku bisa merasakan apa yang dia lakukan - kedengarannya aneh, ya - dengan pantatku. Saya agak mengerti apa yang ingin dia lakukan. "
Jauh dari kabut dan panasnya Castle di Mountain View, kantor pusat Google yang nyaman berada. Saya datang kepada mereka untuk bertemu dengan insinyur yang bekerja di dalam X, yang mungkin dikenal oleh Anda sebagai Google X. Divisi perusahaan ini terlibat dalam proyek-proyek penelitian risiko tinggi jangka panjang. Pada 2015, ketika Google merestrukturisasi dan mengatur konglomerat Alphabet, X menjatuhkan Google pada judul (situs web mereka disebut X.company). Setahun setelah ini, X / Alphabet memutuskan untuk memisahkan program untuk membuat kendaraan robot menjadi perusahaan yang terpisah, seperti yang telah terjadi dengan berbagai proyek lain, dan Waymo muncul. Sepertinya sepupu Google.
Jadi, meskipun kantor-kantor Waymo masih di dalam "kapal pengangkut," dua klik ini sudah perlahan-lahan memisahkan, dan semua karyawan Waymo duduk secara terpisah.
Bangunan X / Waymo besar dan ringan. Prototipe drone Project Wing ada di mana-mana. Saya melihat mesin tik Firefly kecil yang dibuat oleh perusahaan. "Ada sesuatu yang baik tentang apa yang kamu lakukan sendiri," kata Villegas di Castle. "Tapi tidak ada AC di dalamnya, jadi aku tidak merindukan mereka."
Tidak jauh dari kafetaria di sudut salah satu sayap bangunan adalah cluster simulasi Waymo. Semua orang tampaknya memiliki Carcraft dan XView di layar. Sejumlah besar poligon dengan latar belakang gelap. Orang-orang inilah yang menciptakan dunia virtual yang dikendarai oleh mobil-mobil Waymo.
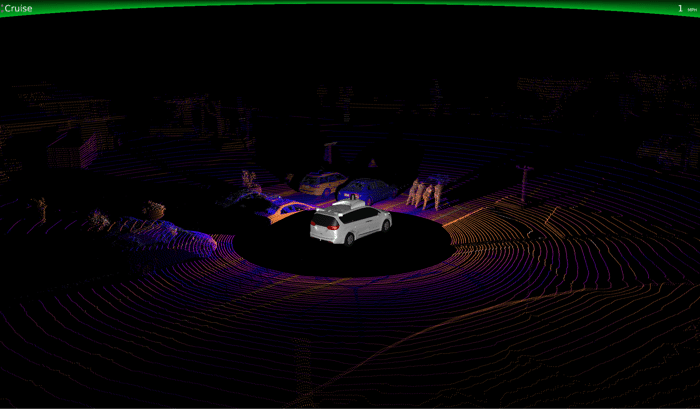 Apa yang dilihat pemindai laser Waymo ketika empat mendorong mobil
Apa yang dilihat pemindai laser Waymo ketika empat mendorong mobilSaya menunggu James Stout, pencipta Carcraft. Dia tidak memiliki kesempatan untuk berbicara di depan umum tentang proyeknya, jadi antusiasmenya muncul. Carcraft adalah gagasannya.
"Saya sedang mencari lowongan dan melihat bahwa tim untuk menciptakan robomobiles merekrut karyawan," katanya. "Aku tidak percaya mereka baru saja memposting sebuah pekerjaan." Dia bergabung dengan tim dan segera mulai membuat instrumen, berkat yang 8 juta mil virtual sehari sedang bepergian hari ini.
Awalnya, alat ini digunakan terutama untuk memantau apa yang akan dilakukan mobil mereka dalam situasi sulit di mana pengemudi langsung mengendalikan mobil. Dari saat-saat seperti itu, mereka mulai membuat skrip. “Dengan cepat menjadi jelas bahwa ini adalah alat yang sangat berguna, dan banyak yang dapat dibuat atas dasar itu,” kata Stout. Kemungkinan Carcraft telah berkembang sehingga sekarang sesuai dengan seluruh kota, dan jumlah mobil telah berkembang menjadi taman virtual yang sangat besar.Stout memperkenalkan saya pada Elena Kolarov, kepala Departemen Layanan Scripting. Di depannya ada dua monitor. Di sebelah kanan adalah Xview yang menunjukkan apa yang dilihat mesin. Mesin ini menggunakan kamera, radar, dan LIDAR untuk mengidentifikasi objek di bidang pandang - mesin ini menyajikannya dalam bentuk wireframe kecil.Garis hijau muncul dari formulir dan menunjukkan cara yang memungkinkan, menurut mesin, objek dapat bergerak. Di bawah ini adalah gambar, yang menunjukkan bahwa kamera mobil biasa sedang ditembak. Kolyarova dapat mengaktifkan tampilan data yang diterima dari LIDAR - mereka ditampilkan dalam titik-titik oranye dan ungu.Kami melihat mereproduksi kasus penataan ulang yang sebenarnya dalam satu baris dalam gerakan melingkar di Kastil. Kolyarova beralih ke simulator. Semuanya terlihat sama, tetapi ini bukan catatan acara, tetapi situasi baru yang harus diatasi mesin. Satu-satunya perbedaan adalah bahwa di bagian atas layar ada tulisan "simulasi", dalam huruf merah besar. Stout mengatakan ia harus menambahkannya karena orang-orang terus membingungkan simulasi dengan kenyataan sepanjang waktu. Bagaimana gerakan melingkar di kastil terlihat di XViewMereka memuat situasi yang berbeda. Itu di Phoenix. Kolyarova memperbesar gambar untuk menunjukkan model kota mereka. Untuk keseluruhan model, mereka menandai, “di mana semua jalur, di mana jalur berubah menjadi, di mana tanda berhenti, di mana lampu lalu lintas, trotoar, di mana pusat jalur - semua yang perlu Anda ketahui,” kata Stout.
Bagaimana gerakan melingkar di kastil terlihat di XViewMereka memuat situasi yang berbeda. Itu di Phoenix. Kolyarova memperbesar gambar untuk menunjukkan model kota mereka. Untuk keseluruhan model, mereka menandai, “di mana semua jalur, di mana jalur berubah menjadi, di mana tanda berhenti, di mana lampu lalu lintas, trotoar, di mana pusat jalur - semua yang perlu Anda ketahui,” kata Stout.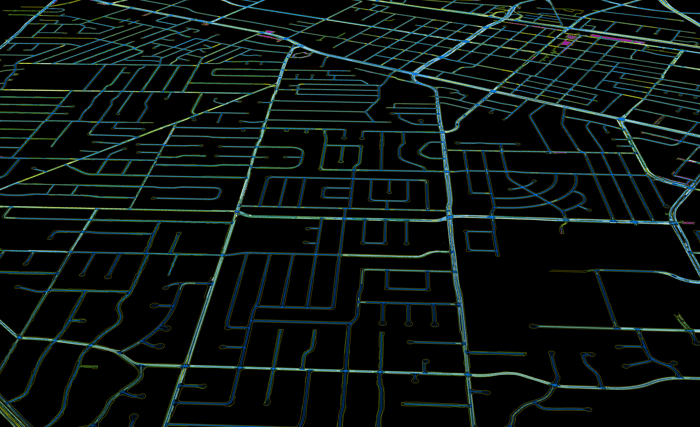 Sekarang kita meningkatkan satu persimpangan empat arah di suatu tempat dekat Phoenix. Kolyarova mulai menempatkan mobil-mobil buatan, pejalan kaki dan pengendara sepeda di atasnya.
Sekarang kita meningkatkan satu persimpangan empat arah di suatu tempat dekat Phoenix. Kolyarova mulai menempatkan mobil-mobil buatan, pejalan kaki dan pengendara sepeda di atasnya. Menciptakan Situasi Buatan dalam CarcraftDengan menekan tombol pintas, objek mulai bergerak. Mobil berperilaku seperti mobil, mengemudi di jalur mereka atau berbelok. Pengendara sepeda berperilaku sesuai. Logika mereka diambil dari data yang diperoleh dari jutaan mil yang digulung di DOP. Dan semua ini didasarkan pada peta dunia yang sangat detail dan model fisik dari peserta yang berbeda dalam situasi tersebut.
Menciptakan Situasi Buatan dalam CarcraftDengan menekan tombol pintas, objek mulai bergerak. Mobil berperilaku seperti mobil, mengemudi di jalur mereka atau berbelok. Pengendara sepeda berperilaku sesuai. Logika mereka diambil dari data yang diperoleh dari jutaan mil yang digulung di DOP. Dan semua ini didasarkan pada peta dunia yang sangat detail dan model fisik dari peserta yang berbeda dalam situasi tersebut. Tidak mengherankan, hal tersulit adalah mensimulasikan perilaku orang lain. "Aku tidak khawatir tentang kamu mengemudi, aku khawatir tentang orang lain di jalan."“Mobil kami melihat dunia, memahami dunia. Mereka memahami niat semua peserta yang bergerak di lingkungan - mobil, pejalan kaki, pengendara sepeda, pengendara sepeda motor. Tidak cukup hanya melacak objek di ruang angkasa. Anda perlu memahami apa yang dia lakukan, ”kata Dmitry Dolgov, wakil presiden pengembangan Waymo. - Ini adalah tugas utama dalam menciptakan robomobile yang terampil dan aman. "Simulasi semacam itu, pemahaman tentang perilaku peserta lain dalam gerakan itu, sangat mirip dengan memodelkan perilaku mereka dalam simulasi."Ada satu perbedaan utama: di dunia nyata, Anda akan membutuhkan data baru dan real-time untuk diproses dengan cepat dan mengubah skrip menjadi mesin yang ramah mesin, dan kemudian menavigasi. Tetapi sekarang, setelah beberapa tahun bekerja di proyek ini, mereka yakin bahwa mereka dapat melakukan ini, karena mereka “melakukan banyak pemeriksaan yang menunjukkan bahwa kita dapat mengenali sejumlah besar opsi pejalan kaki,” kata Stout.Jadi dalam kebanyakan situasi, mereka hanya melewatkan tahap pengenalan objek. Alih-alih memberi makan data mentah mobil yang harus dikenali sebagai pejalan kaki, mereka hanya mengatakan padanya: ada pejalan kaki.Di persimpangan, Kolyarova menyulitkan kehidupan mobil. Dia menekan V, hotkey untuk kendaraan, dan objek baru muncul di Carcraft. Kemudian, dengan mouse di menu sebelah kanan, dia memilih favorit saya di antara tipe mobil: bird_squirrel.Berbagai objek dapat dipaksa untuk bertindak sesuai dengan pra-konfigurasi logika di Waymo atau diprogram logika di Carcraft sehingga mereka bergerak dengan cara yang sangat spesifik - ini diperlukan untuk menguji berbagai jenis perilaku. "Ada rentang yang luas antara kontrol penuh atas situasi dan pengaturan sederhana objek dalam adegan, setelah itu Anda bisa menjalankan semuanya," kata Stout.Karena dasar dari situasi ini dikonfigurasi, Anda dapat mulai memeriksa semua opsi penting yang terkandung di dalamnya. Misalkan Anda ingin memeriksa di persimpangan tunggal urutan berbeda kedatangan mobil, pejalan kaki dan pengendara sepeda di sana, waktu yang berbeda mereka berhenti, kecepatan mereka dan apa pun. Kemudian, Anda cukup mengatur interval yang wajar untuk parameter yang sesuai dan kehilangan semua kombinasi situasi ini.Mereka menyebutnya kabur, dan dalam hal ini, 800 situasi secara otomatis dibuat di persimpangan kami. Hasilnya adalah diagram renda yang indah - dan semua programmer dapat memeriksanya dan melihat bagaimana kombinasi variabel yang berbeda memengaruhi jalur yang dipilih oleh robomobile.
Tidak mengherankan, hal tersulit adalah mensimulasikan perilaku orang lain. "Aku tidak khawatir tentang kamu mengemudi, aku khawatir tentang orang lain di jalan."“Mobil kami melihat dunia, memahami dunia. Mereka memahami niat semua peserta yang bergerak di lingkungan - mobil, pejalan kaki, pengendara sepeda, pengendara sepeda motor. Tidak cukup hanya melacak objek di ruang angkasa. Anda perlu memahami apa yang dia lakukan, ”kata Dmitry Dolgov, wakil presiden pengembangan Waymo. - Ini adalah tugas utama dalam menciptakan robomobile yang terampil dan aman. "Simulasi semacam itu, pemahaman tentang perilaku peserta lain dalam gerakan itu, sangat mirip dengan memodelkan perilaku mereka dalam simulasi."Ada satu perbedaan utama: di dunia nyata, Anda akan membutuhkan data baru dan real-time untuk diproses dengan cepat dan mengubah skrip menjadi mesin yang ramah mesin, dan kemudian menavigasi. Tetapi sekarang, setelah beberapa tahun bekerja di proyek ini, mereka yakin bahwa mereka dapat melakukan ini, karena mereka “melakukan banyak pemeriksaan yang menunjukkan bahwa kita dapat mengenali sejumlah besar opsi pejalan kaki,” kata Stout.Jadi dalam kebanyakan situasi, mereka hanya melewatkan tahap pengenalan objek. Alih-alih memberi makan data mentah mobil yang harus dikenali sebagai pejalan kaki, mereka hanya mengatakan padanya: ada pejalan kaki.Di persimpangan, Kolyarova menyulitkan kehidupan mobil. Dia menekan V, hotkey untuk kendaraan, dan objek baru muncul di Carcraft. Kemudian, dengan mouse di menu sebelah kanan, dia memilih favorit saya di antara tipe mobil: bird_squirrel.Berbagai objek dapat dipaksa untuk bertindak sesuai dengan pra-konfigurasi logika di Waymo atau diprogram logika di Carcraft sehingga mereka bergerak dengan cara yang sangat spesifik - ini diperlukan untuk menguji berbagai jenis perilaku. "Ada rentang yang luas antara kontrol penuh atas situasi dan pengaturan sederhana objek dalam adegan, setelah itu Anda bisa menjalankan semuanya," kata Stout.Karena dasar dari situasi ini dikonfigurasi, Anda dapat mulai memeriksa semua opsi penting yang terkandung di dalamnya. Misalkan Anda ingin memeriksa di persimpangan tunggal urutan berbeda kedatangan mobil, pejalan kaki dan pengendara sepeda di sana, waktu yang berbeda mereka berhenti, kecepatan mereka dan apa pun. Kemudian, Anda cukup mengatur interval yang wajar untuk parameter yang sesuai dan kehilangan semua kombinasi situasi ini.Mereka menyebutnya kabur, dan dalam hal ini, 800 situasi secara otomatis dibuat di persimpangan kami. Hasilnya adalah diagram renda yang indah - dan semua programmer dapat memeriksanya dan melihat bagaimana kombinasi variabel yang berbeda memengaruhi jalur yang dipilih oleh robomobile. Bagan pemilihanTantangannya adalah untuk menganalisis semua opsi dan simulasi ini untuk menemukan data menarik yang dapat membantu programmer meningkatkan program mengemudi mereka. Langkah pertama mungkin: apakah mobil macet? Jika demikian, maka situasi ini menjadi menarik untuk bekerja dengannya.Animasi di bawah ini menunjukkan situasi seperti itu. Persimpangan kompleks yang ada dalam kenyataan di Mountain View. Belok kiri, mobil itu melihat seorang pengendara sepeda yang muncul, itulah sebabnya dia berhenti di jalan. Programmer mengambil kelas masalah ini dan mendesain ulang perangkat lunak sehingga merespons dengan benar situasi. Video menunjukkan situasi nyata, dan kemudian simulasi. Di mana mereka berbeda, Anda dapat melihat bahwa mesin simulasi terus bergerak, dan kemudian kotak bertitik muncul dengan tulisan "shadow_vehicle_pose". Kotak putus-putus menunjukkan apa yang terjadi dalam kenyataan. Bagi karyawan Waymo, ini adalah visualisasi kemajuan yang paling jelas.
Bagan pemilihanTantangannya adalah untuk menganalisis semua opsi dan simulasi ini untuk menemukan data menarik yang dapat membantu programmer meningkatkan program mengemudi mereka. Langkah pertama mungkin: apakah mobil macet? Jika demikian, maka situasi ini menjadi menarik untuk bekerja dengannya.Animasi di bawah ini menunjukkan situasi seperti itu. Persimpangan kompleks yang ada dalam kenyataan di Mountain View. Belok kiri, mobil itu melihat seorang pengendara sepeda yang muncul, itulah sebabnya dia berhenti di jalan. Programmer mengambil kelas masalah ini dan mendesain ulang perangkat lunak sehingga merespons dengan benar situasi. Video menunjukkan situasi nyata, dan kemudian simulasi. Di mana mereka berbeda, Anda dapat melihat bahwa mesin simulasi terus bergerak, dan kemudian kotak bertitik muncul dengan tulisan "shadow_vehicle_pose". Kotak putus-putus menunjukkan apa yang terjadi dalam kenyataan. Bagi karyawan Waymo, ini adalah visualisasi kemajuan yang paling jelas. Tetapi mereka perlu mencari tidak hanya untuk kasus-kasus di mana mobil macet. Mereka dapat mencari situasi di mana waktu yang dihabiskan untuk solusi terlalu lama, atau pengeremannya terlalu lambat. Segala sesuatu yang diprogram dan dipelajari oleh programmer, mereka simulasikan untuk menemukan masalah.Stout dan kepala Departemen Perangkat Lunak Utang secara spesifik menetapkan bahwa simulasi memiliki tiga sifat utama. Pertama, dalam simulasi, Anda dapat berkendara bermil-mil lebih banyak daripada yang dimungkinkan dengan taman fisik; dan pengalaman itu baik. Kedua, miles ini fokus pada interaksi yang menarik dan kompleks, dan bukan hanya miles yang membosankan. Ketiga, siklus pengembangan perangkat lunak bisa lebih cepat."Siklus pengulangan sangat penting bagi kami, dan pekerjaan yang dilakukan pada simulasi memungkinkan kami untuk mengompresnya secara drastis," kata Dolgov kepada saya. "Sebuah siklus yang akan memakan waktu berminggu-minggu untuk bekerja dengan kami untuk pertama kalinya, sekarang berlalu dalam hitungan menit."Bagaimana dengan noda minyak di jalan? Meledak ban, burung aneh, lubang seukuran shell, dan kegilaan umum pengemudi. Apakah mereka berpura-pura? Hutang percaya diri. Dia mengatakan bahwa mereka bisa melakukannya, tetapi "berapa banyak yang Anda butuhkan untuk meningkatkan akurasi simulator?"Manfaat dari dunia virtual Carcraft bukanlah bahwa mereka adalah gambar dunia nyata yang indah, ideal, dan fotorealistik. Manfaat mereka adalah bahwa mereka mencerminkan dunia nyata dalam aspek-aspek penting bagi robot mobil dan memungkinkan mereka untuk berkendara miliaran mil lebih banyak daripada pemeriksaan fisik. Perangkat lunak mesin host tidak membuat keputusan, di dunia yang mirip dengan yang asli - baginya semuanya seolah-olah membuat keputusan di dunia nyata.Dan sistem ini berfungsi. Departemen Perhubungan California mewajibkan perusahaan untuk melaporkan berapa banyak robomobiles mereka yang menempuh jarak bermil-mil dalam setahun, dan berapa kali pengemudi harus mengambil kendali. Waymo tidak hanya mengendarai tiga ordo yang berkekuatan lebih banyak mil daripada siapa pun, tetapi jumlah kasus alih kendali dengan cepat menurun.Waymo menggambar 635.868 mil otonom dari Desember 2015 hingga November 2016. Pada mil ini, transfer kontrol terjadi 124 kali, rata-rata sekali setiap 5.000 mil, atau 0,2 transfer per 1.000 mil. Pada tahun sebelumnya, mereka mencapai 424.331 mil otonom, mereka memiliki 272 shift, rata-rata setiap 890 mil, atau 0,8 shift per 1000 mil.Setiap orang, tentu saja, mengatakan bahwa angka-angka ini tidak dapat dibandingkan, tetapi mari kita bersikap realistis: ini adalah indikator terbaik untuk California. Semua sisanya secara total mencapai kekuatan 20.000 mil.Pendekatan Waymo tidak mengejutkan para ahli pihak ketiga. "Sekarang Anda dapat mengukur kecanggihan tim yang bekerja pada otonomi - apakah itu drone atau mobil - dengan seberapa serius mereka melakukan simulasi," kata Chris Dixon, pemodal ventura di Andreessen Horowitz, yang berinvestasi di perusahaan simulasi perusahaan Improbable, sebuah perusahaan simulasi. "Dan Waymo berada di puncak, mereka yang paling canggih."Saya bertanya kepada Kepala Inovasi Asuransi Allstate, Sunil Chintakindi, tentang Waymo. "Tanpa infrastruktur simulasi yang andal, Anda tidak dapat membuat mesin dengan tingkat otonomi tertinggi," katanya. "Aku bahkan tidak akan berbicara dengan seseorang yang berpikir sebaliknya."Peneliti lain memilih jalur yang sama. Huey Peng adalah Direktur Mcity, Laboratorium Transportasi Otonomi dan Terpadu Universitas Michigan. Peng mengatakan bahwa sistem apa pun yang berfungsi untuk robomobiles akan menjadi "kombinasi simulasi 99%, pemeriksaan struktural yang dirancang dengan hati-hati, dan sejumlah pemeriksaan di jalan."Bersama-sama dengan mahasiswa pascasarjana, mereka mengusulkan suatu sistem untuk menggabungkan jarak tempuh yang sesungguhnya dengan simulasi untuk mempercepat pemeriksaan secara signifikan. Sistemnya agak mirip dengan implementasi Waymo. "Kami menyarankan untuk menghapus semua tahapan mengemudi yang membosankan dan membuatnya menarik," kata Peng. "Itu akan memungkinkanmu untuk mempercepat ratusan kali: seribu mil berubah menjadi sejuta."Ruang lingkup, organisasi dan aktivitas proyek Waymo mengejutkan. Saya menggambarkan pemeriksaan struktural yang dilakukan oleh Google, Pengu, termasuk 20.000 situasi yang masuk ke dalam simulasi dari pemeriksaan struktural yang dilakukan oleh tim di Castle. Awalnya dia tidak mendengarku dan mulai berkata bahwa "2000 situasi ini adalah sosok yang mengesankan." Saya memperbaikinya: "Itu adalah 20.000 simulasi." Dia diam. "20.000," katanya, mempertimbangkan itu. "Ini mengesankan."Faktanya, semua 20.000 situasi ini mewakili sebagian kecil dari total jumlah situasi yang diverifikasi oleh Waymo. Ini hanya hasil dari pemrosesan pemeriksaan struktural. Mereka bahkan memiliki lebih banyak situasi yang diambil dari mengemudi di jalan nyata dan hanya dari kepala mereka."Mereka melakukannya dengan cukup baik," kata Peng. "Mereka jauh di depan orang lain dalam pengembangan tingkat keempat," menggunakan pengurangan jargon untuk mobil yang sepenuhnya otonom.Peng menyuarakan posisi pembuat mobil tradisional. Dia mengatakan bahwa mereka berusaha untuk mencapai sesuatu yang sama sekali berbeda. Mereka tidak bertujuan otonomi penuh, tetapi mencoba untuk menambahkan teknologi yang membantu mengemudi, "menghasilkan uang", dan kemudian bergerak lebih jauh menuju otonomi penuh. Waymo tidak dapat dibandingkan dengan sumber daya dan kebebasan perusahaan untuk memasang pengintai laser senilai $ 70.000 pada sebuah mesin dengan pabrikan seperti Chevy, yang mobil-mobilnya seharusnya tidak berharga lebih dari $ 40.000 untuk dijual di pasar."GM, Ford, Toyota, dan yang lainnya berkata: 'Biarkan saya mengurangi tabrakan dan korban dan meningkatkan keselamatan bagi konsumen massal.' Tujuan mereka sangat berbeda, kata Peng. "Kita perlu memikirkan jutaan mobil, bukan hanya beberapa ribu."Dan Waymo menghadapi lebih banyak hambatan dalam perlombaan untuk otonomi penuh daripada yang biasa dia lakukan, misalnya, Tesla. Chris Gerde adalah direktur Pusat Penelitian Otomotif Stanford. Delapan belas bulan lalu dia mengatakan kepada kolega saya bahwa Waymo “memiliki pemahaman yang jauh lebih baik tentang kedalaman masalah dan seberapa dekat kita untuk menyelesaikannya.” Ketika saya bertanya kepadanya minggu lalu apakah dia masih berpikir begitu, dia berkata “banyak” telah berubah. ""Pembuat mobil seperti Ford dan GM memamerkan mobil mereka dan membangun set data jalan mereka," katanya. - Tesla mengumpulkan sejumlah besar data dari pengembangan autopilot, mempelajari bagaimana sistem berperilaku tepat dalam kondisi di mana pelanggan mereka menemukan diri mereka sendiri. Kemampuan mereka untuk secara diam-diam menguji algoritma dan basis mesin mereka yang berkembang pesat merupakan tempat pengujian yang menakjubkan. ”Gerde mengatakan bahwa dalam dunia simulasi, ia melihat beberapa pesaing dengan program yang cukup serius. “Saya yakin ada banyak kemungkinan simulasi, tetapi saya telah melihat sejumlah contoh yang cukup bagus. Waymo tidak lagi terlihat begitu unik. Mereka benar-benar memiliki kekurangan, tetapi hari ini ada banyak kelompok yang mengalami pendekatan serupa. Jadi sekarang pertanyaannya adalah siapa yang akan melakukannya dengan lebih baik. "Ini bukan hanya semacam demonstrasi operasi jaringan saraf yang terlihat seperti otak. Ini adalah lompatan besar ke depan dalam pengembangan AI, bahkan untuk perusahaan Alphabet, yang dikenal karena kebijakan AI yang agresif. Ini bukan Foto Google, di mana kesalahannya tidak berharga. Ini adalah sistem yang akan hidup dan sepenuhnya mandiri berinteraksi dengan dunia orang. Dia akan memahami aturan kita, mengomunikasikan keinginannya, akan menjadi jelas bagi mata dan pikiran kita.Waymo tampaknya telah sedikit menjauh dari bekerja dengan berkuda sebagai keterampilan teknis tertentu, dan beralih ke bekerja dengannya sebagai bentuk kegiatan sosial manusia. Apa artinya mengemudi "secara normal" dan bukan hanya "secara hukum"? Bagaimana cara mengajarkan AI ini?Ternyata untuk membuat AI seperti itu, Anda tidak perlu hanya sejumlah besar data dan seni programmer. Ini adalah kondisi yang diperlukan tetapi tidak cukup. Bagian ini diperlukan agar orang bersinkronisasi dengan mobil, memahami dunia apa adanya. Para pengemudi di Castle mengerti apa artinya menjadi salah satu dari mesin ini, untuk melihat dan mengambil keputusan sebagaimana adanya. Mungkin ini bekerja dua arah - orang yang lebih baik memahami mesin, semakin baik mesin memahami orang.Memori bundaran di Austin menjadi bagian dari Castle menjadi kumpulan data mobil robot menjadi situasi bagi Carcraft menjadi jaringan simulasi menjadi perangkat lunak baru yang akhirnya kembali ke mobil robot fisik menuju bundaran di Texas ini.Bahkan di dalam abstraksi poligonal simulasi yang digunakan oleh AI untuk mengenali dunia, ada jejak mimpi manusia, bagian ingatan, perasaan pengemudi. Komponen-komponen ini bukanlah kesalahan dan bukan bintik-bintik yang perlu digosok, tetapi bagian-bagian penting dari suatu sistem yang dapat merevolusi transportasi, di kota-kota, dan, neraka, hampir di mana-mana.
Tetapi mereka perlu mencari tidak hanya untuk kasus-kasus di mana mobil macet. Mereka dapat mencari situasi di mana waktu yang dihabiskan untuk solusi terlalu lama, atau pengeremannya terlalu lambat. Segala sesuatu yang diprogram dan dipelajari oleh programmer, mereka simulasikan untuk menemukan masalah.Stout dan kepala Departemen Perangkat Lunak Utang secara spesifik menetapkan bahwa simulasi memiliki tiga sifat utama. Pertama, dalam simulasi, Anda dapat berkendara bermil-mil lebih banyak daripada yang dimungkinkan dengan taman fisik; dan pengalaman itu baik. Kedua, miles ini fokus pada interaksi yang menarik dan kompleks, dan bukan hanya miles yang membosankan. Ketiga, siklus pengembangan perangkat lunak bisa lebih cepat."Siklus pengulangan sangat penting bagi kami, dan pekerjaan yang dilakukan pada simulasi memungkinkan kami untuk mengompresnya secara drastis," kata Dolgov kepada saya. "Sebuah siklus yang akan memakan waktu berminggu-minggu untuk bekerja dengan kami untuk pertama kalinya, sekarang berlalu dalam hitungan menit."Bagaimana dengan noda minyak di jalan? Meledak ban, burung aneh, lubang seukuran shell, dan kegilaan umum pengemudi. Apakah mereka berpura-pura? Hutang percaya diri. Dia mengatakan bahwa mereka bisa melakukannya, tetapi "berapa banyak yang Anda butuhkan untuk meningkatkan akurasi simulator?"Manfaat dari dunia virtual Carcraft bukanlah bahwa mereka adalah gambar dunia nyata yang indah, ideal, dan fotorealistik. Manfaat mereka adalah bahwa mereka mencerminkan dunia nyata dalam aspek-aspek penting bagi robot mobil dan memungkinkan mereka untuk berkendara miliaran mil lebih banyak daripada pemeriksaan fisik. Perangkat lunak mesin host tidak membuat keputusan, di dunia yang mirip dengan yang asli - baginya semuanya seolah-olah membuat keputusan di dunia nyata.Dan sistem ini berfungsi. Departemen Perhubungan California mewajibkan perusahaan untuk melaporkan berapa banyak robomobiles mereka yang menempuh jarak bermil-mil dalam setahun, dan berapa kali pengemudi harus mengambil kendali. Waymo tidak hanya mengendarai tiga ordo yang berkekuatan lebih banyak mil daripada siapa pun, tetapi jumlah kasus alih kendali dengan cepat menurun.Waymo menggambar 635.868 mil otonom dari Desember 2015 hingga November 2016. Pada mil ini, transfer kontrol terjadi 124 kali, rata-rata sekali setiap 5.000 mil, atau 0,2 transfer per 1.000 mil. Pada tahun sebelumnya, mereka mencapai 424.331 mil otonom, mereka memiliki 272 shift, rata-rata setiap 890 mil, atau 0,8 shift per 1000 mil.Setiap orang, tentu saja, mengatakan bahwa angka-angka ini tidak dapat dibandingkan, tetapi mari kita bersikap realistis: ini adalah indikator terbaik untuk California. Semua sisanya secara total mencapai kekuatan 20.000 mil.Pendekatan Waymo tidak mengejutkan para ahli pihak ketiga. "Sekarang Anda dapat mengukur kecanggihan tim yang bekerja pada otonomi - apakah itu drone atau mobil - dengan seberapa serius mereka melakukan simulasi," kata Chris Dixon, pemodal ventura di Andreessen Horowitz, yang berinvestasi di perusahaan simulasi perusahaan Improbable, sebuah perusahaan simulasi. "Dan Waymo berada di puncak, mereka yang paling canggih."Saya bertanya kepada Kepala Inovasi Asuransi Allstate, Sunil Chintakindi, tentang Waymo. "Tanpa infrastruktur simulasi yang andal, Anda tidak dapat membuat mesin dengan tingkat otonomi tertinggi," katanya. "Aku bahkan tidak akan berbicara dengan seseorang yang berpikir sebaliknya."Peneliti lain memilih jalur yang sama. Huey Peng adalah Direktur Mcity, Laboratorium Transportasi Otonomi dan Terpadu Universitas Michigan. Peng mengatakan bahwa sistem apa pun yang berfungsi untuk robomobiles akan menjadi "kombinasi simulasi 99%, pemeriksaan struktural yang dirancang dengan hati-hati, dan sejumlah pemeriksaan di jalan."Bersama-sama dengan mahasiswa pascasarjana, mereka mengusulkan suatu sistem untuk menggabungkan jarak tempuh yang sesungguhnya dengan simulasi untuk mempercepat pemeriksaan secara signifikan. Sistemnya agak mirip dengan implementasi Waymo. "Kami menyarankan untuk menghapus semua tahapan mengemudi yang membosankan dan membuatnya menarik," kata Peng. "Itu akan memungkinkanmu untuk mempercepat ratusan kali: seribu mil berubah menjadi sejuta."Ruang lingkup, organisasi dan aktivitas proyek Waymo mengejutkan. Saya menggambarkan pemeriksaan struktural yang dilakukan oleh Google, Pengu, termasuk 20.000 situasi yang masuk ke dalam simulasi dari pemeriksaan struktural yang dilakukan oleh tim di Castle. Awalnya dia tidak mendengarku dan mulai berkata bahwa "2000 situasi ini adalah sosok yang mengesankan." Saya memperbaikinya: "Itu adalah 20.000 simulasi." Dia diam. "20.000," katanya, mempertimbangkan itu. "Ini mengesankan."Faktanya, semua 20.000 situasi ini mewakili sebagian kecil dari total jumlah situasi yang diverifikasi oleh Waymo. Ini hanya hasil dari pemrosesan pemeriksaan struktural. Mereka bahkan memiliki lebih banyak situasi yang diambil dari mengemudi di jalan nyata dan hanya dari kepala mereka."Mereka melakukannya dengan cukup baik," kata Peng. "Mereka jauh di depan orang lain dalam pengembangan tingkat keempat," menggunakan pengurangan jargon untuk mobil yang sepenuhnya otonom.Peng menyuarakan posisi pembuat mobil tradisional. Dia mengatakan bahwa mereka berusaha untuk mencapai sesuatu yang sama sekali berbeda. Mereka tidak bertujuan otonomi penuh, tetapi mencoba untuk menambahkan teknologi yang membantu mengemudi, "menghasilkan uang", dan kemudian bergerak lebih jauh menuju otonomi penuh. Waymo tidak dapat dibandingkan dengan sumber daya dan kebebasan perusahaan untuk memasang pengintai laser senilai $ 70.000 pada sebuah mesin dengan pabrikan seperti Chevy, yang mobil-mobilnya seharusnya tidak berharga lebih dari $ 40.000 untuk dijual di pasar."GM, Ford, Toyota, dan yang lainnya berkata: 'Biarkan saya mengurangi tabrakan dan korban dan meningkatkan keselamatan bagi konsumen massal.' Tujuan mereka sangat berbeda, kata Peng. "Kita perlu memikirkan jutaan mobil, bukan hanya beberapa ribu."Dan Waymo menghadapi lebih banyak hambatan dalam perlombaan untuk otonomi penuh daripada yang biasa dia lakukan, misalnya, Tesla. Chris Gerde adalah direktur Pusat Penelitian Otomotif Stanford. Delapan belas bulan lalu dia mengatakan kepada kolega saya bahwa Waymo “memiliki pemahaman yang jauh lebih baik tentang kedalaman masalah dan seberapa dekat kita untuk menyelesaikannya.” Ketika saya bertanya kepadanya minggu lalu apakah dia masih berpikir begitu, dia berkata “banyak” telah berubah. ""Pembuat mobil seperti Ford dan GM memamerkan mobil mereka dan membangun set data jalan mereka," katanya. - Tesla mengumpulkan sejumlah besar data dari pengembangan autopilot, mempelajari bagaimana sistem berperilaku tepat dalam kondisi di mana pelanggan mereka menemukan diri mereka sendiri. Kemampuan mereka untuk secara diam-diam menguji algoritma dan basis mesin mereka yang berkembang pesat merupakan tempat pengujian yang menakjubkan. ”Gerde mengatakan bahwa dalam dunia simulasi, ia melihat beberapa pesaing dengan program yang cukup serius. “Saya yakin ada banyak kemungkinan simulasi, tetapi saya telah melihat sejumlah contoh yang cukup bagus. Waymo tidak lagi terlihat begitu unik. Mereka benar-benar memiliki kekurangan, tetapi hari ini ada banyak kelompok yang mengalami pendekatan serupa. Jadi sekarang pertanyaannya adalah siapa yang akan melakukannya dengan lebih baik. "Ini bukan hanya semacam demonstrasi operasi jaringan saraf yang terlihat seperti otak. Ini adalah lompatan besar ke depan dalam pengembangan AI, bahkan untuk perusahaan Alphabet, yang dikenal karena kebijakan AI yang agresif. Ini bukan Foto Google, di mana kesalahannya tidak berharga. Ini adalah sistem yang akan hidup dan sepenuhnya mandiri berinteraksi dengan dunia orang. Dia akan memahami aturan kita, mengomunikasikan keinginannya, akan menjadi jelas bagi mata dan pikiran kita.Waymo tampaknya telah sedikit menjauh dari bekerja dengan berkuda sebagai keterampilan teknis tertentu, dan beralih ke bekerja dengannya sebagai bentuk kegiatan sosial manusia. Apa artinya mengemudi "secara normal" dan bukan hanya "secara hukum"? Bagaimana cara mengajarkan AI ini?Ternyata untuk membuat AI seperti itu, Anda tidak perlu hanya sejumlah besar data dan seni programmer. Ini adalah kondisi yang diperlukan tetapi tidak cukup. Bagian ini diperlukan agar orang bersinkronisasi dengan mobil, memahami dunia apa adanya. Para pengemudi di Castle mengerti apa artinya menjadi salah satu dari mesin ini, untuk melihat dan mengambil keputusan sebagaimana adanya. Mungkin ini bekerja dua arah - orang yang lebih baik memahami mesin, semakin baik mesin memahami orang.Memori bundaran di Austin menjadi bagian dari Castle menjadi kumpulan data mobil robot menjadi situasi bagi Carcraft menjadi jaringan simulasi menjadi perangkat lunak baru yang akhirnya kembali ke mobil robot fisik menuju bundaran di Texas ini.Bahkan di dalam abstraksi poligonal simulasi yang digunakan oleh AI untuk mengenali dunia, ada jejak mimpi manusia, bagian ingatan, perasaan pengemudi. Komponen-komponen ini bukanlah kesalahan dan bukan bintik-bintik yang perlu digosok, tetapi bagian-bagian penting dari suatu sistem yang dapat merevolusi transportasi, di kota-kota, dan, neraka, hampir di mana-mana.