Hai Geektimes!
Entri
Kita semua tahu sejak lama bahwa robot adalah masa depan kita. Ada banyak bidang robotika. Perkembangan militer, sosial, menghibur dan hanya robot yang bekerja.
Tapi kali ini saya ingin memberi tahu atas nama tim College di MIREA tentang komponen kompetitif, dan tepatnya tentang robot pegulat sumo.
Sedikit tentang tim kami
Kami ada sejak 2014. Pemenang dan pemenang dari sebagian besar kompetisi adalah Robofinist, Robofest, MIPT Spartakiad dan turnamen yang lebih kecil, dan kami juga juara mutlak Rusia untuk 2016-2017 dalam nominasi mini-sumo.
Siapa robot sumo ini?
Awalnya, ketika kami pertama kali belajar tentang kompetisi seperti itu, pegulat sumo dibuat terutama dari lego. Tapi ini ide yang sangat buruk, lebih lanjut tentang itu nanti.
Pada saat ini, sumoist yang benar dijelaskan dengan sangat sederhana: sepotong besi yang sepenuhnya otonom di atas roda, dengan otak dan sepasang sensor, yang mengetuk sepotong besi yang sama keluar dari cincin.
Ada 4 jenis:
1. Mega-Sumoist
2. Mini Sumoist
3. Mikro-Sumoist
4. Nano-Sumoist
Semua berbeda tidak hanya secara eksternal, tetapi juga secara internal.
Mega adalah robot terbesar dan paling berbahaya. Berat maksimum hingga 3 kg, kemampuan untuk meletakkan berbagai "cangkir hisap", yang tidak boleh dilakukan dengan robot lain.
Mini - bagus, robot kecil hingga 500 gram 10 kali 10 cm Tidak sulit disolder, mudah dipasang dan dirakit. Mereka adalah nominasi paling populer di sumo.
Thumbnail mikro dan nano - mini. Mikro 5 oleh 5 oleh 5, nano 2,5 oleh 2,5 oleh 2,5. Sulit untuk menyolder dan mengambil detailnya. Lebih populer daripada mega sumo.
Di halaman
ini Anda dapat membaca aturan kompetisi lebih terinci. (ditambahkan)
Apa esensi dari robo sumo?
Tujuan utama: untuk mendorong musuh melewati batas poligon bulat. Orang yang pertama kali menyentuh benda apa pun di luarnya akan hilang. Tampaknya hal yang sulit adalah mendorong musuh keluar? Dan kesulitannya adalah robot sepenuhnya otonom dan semakin banyak strategi baru yang muncul, yang semakin sulit untuk dihadapi.
Video yang menampilkan robot kami (ditambahkan):
Robofest 2016 (robot dengan kilat, robot dengan bendera bajak laut, robot rendah hitam solid, robot hitam tinggi tanpa gambar)
Robo piknik 2017 (hanya robot kami kecuali robot persegi panjang dengan sensor suara)
Tanpa partisipasi:
Robotex 2016Kejuaraan Robotika Latvia 2017Kompetisi Robot RoboChallenge 2016Ikhtisar kecil taktik pencarian musuh.Terbuat dari apa mereka?
Ayo kembali ke lego. Kemungkinan besar, banyak dari Anda telah mencoba melakukan sesuatu dengan konstruktor Lego yang dapat diprogram, atau setidaknya telah melihat cara melakukannya. Bahkan ada nominasi terpisah untuk robot seperti 15 dengan 15, tetapi sangat membosankan dan hanya cocok untuk pemula atau robot kecil. Dibandingkan dengan sampel buatan sendiri, sampel ini kehilangan segalanya kecuali kerumitan perakitan.
Yang pertama adalah kecepatan rendah. Kedua, ukuran besar. Ketiga, kecepatan respons sensor yang rendah. Dan juga controller itu sendiri meninggalkan banyak yang harus diinginkan.
Detail tentang perakitan dan perakitan
Para pegulat sumo yang membentuk kompetisi sedang melakukan arduino. Mereka menggunakan papan textolite, sensor solder, controller, driver untuk itu, dll. Ada juga berbagai pilihan sensor untuk mendeteksi musuh, tetapi yang inframerah atau laser harus digunakan, karena Sonar sangat lambat dan besar. Tentu saja, mesin dan roda dibutuhkan agar robot bisa bergerak. Anda dapat menempatkan mereka dalam jumlah yang tidak terbatas, tetapi latihan menunjukkan bahwa robot mengendarai dua roda yang terletak di bagian belakang. Dan, tentu saja, robot tidak bisa hidup tanpa ember dan kail. Ember hanyalah selubung, pembungkus dan perlindungan untuk papan dan elemen. Paling sering, baja atau besi. Trailer terbuat dari pisau untuk pisau alat tulis, tetapi ada spesimen dengan pendekatan non-standar, misalnya, penggaris kayu atau wol kapas yang diasah, tetapi ada sedikit kegunaan untuk pendekatan ini.
Yang paling sulit (selain pemrograman) untuk merancang robot.Tetapi terutama bagi mereka yang ingin berpartisipasi, tetapi belum tahu harus mulai dari mana, kami siap untuk berbagi jejak robot, yang merupakan pemenang hadiah dari Spartakad MIPT 2016.
PS Dilakukan di
SprintLayoutIni disebut tahap pertama - penempatan mesin dan sensor. Anda juga dapat mengamati di sini dua sensor kecil di depan pickup, jadi ini adalah sensor garis.
Mereka digunakan untuk mendeteksi garis putih di TPA untuk menghindari jatuh secara tidak sengaja di luar ring, tetapi mereka bukan komponen wajib dan pada kenyataannya tidak sering digunakan. Kecepatan tinggi seringkali tidak memungkinkan Anda untuk berhenti tepat waktu.
Dan di sini pengontrol, driver, sakelar dan konektor baterai sudah diterapkan.
Tetap hanya untuk mencetak jejak dan mentransfernya ke PCB, dan kemudian melacak jejaknya.
Begini tampilannya di papan yang sudah jadi:
Siap meluncurkan robot:
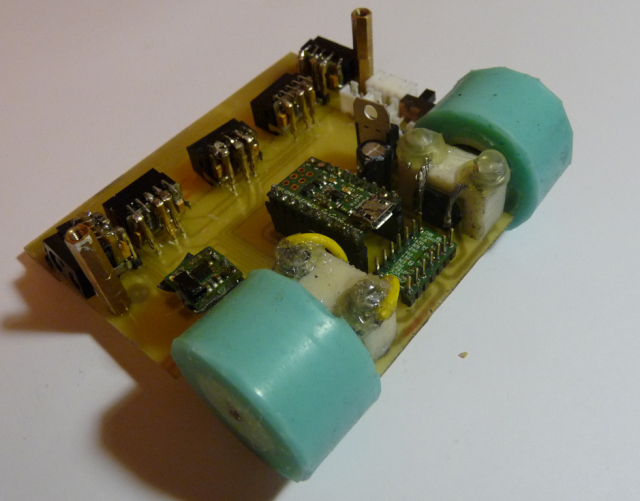
Seperti yang Anda lihat, tidak ada yang rumit di sini. Tentang masalah di bawah ini.
Mari beralih ke pemrograman
Cara termudah adalah dengan menggunakan pengontrol yang kompatibel dengan arduino atau arduino. Juga, Arduino IDE untuk membantu kami. Menurut skema standar, robot memiliki 5 sensor. Jadi negara mungkin
Kami mengecualikan situasi ketika sensor samping secara bersamaan melihat musuh (karena ini tidak dapat terjadi, dan jika itu terjadi, maka ada kerusakan pada salah satu sensor), serta situasi di mana sensor sisi dan dua depan memberikan 0 (mis. lihat), karena ini juga tidak bisa, atau peluangnya terlalu kecil.
Untuk membuatnya pergi ke musuh, kita hanya perlu memasang pin, memberi tegangan pada motor dan membaca bacaan sensor:
Kode robot// int pin_left=10; int pin_center_left=11; int pin_center_right=4; int pin_center=12; int pin_right=7; // int pin_motor_left_forward=9; int pin_motor_left_back=6; int pin_motor_right_forward=3; int pin_motor_right_back=5; // int cl,cc,cr,l,r; // void GLAZ() { cl = digitalRead(pin_center_left); cc = digitalRead(pin_center); cr = digitalRead(pin_center_right); l = digitalRead(pin_left); r = digitalRead(pin_right); } // , 0 255 void MOVE( int a, int b ) { if(a<0) { digitalWrite(pin_motor_left_forward,LOW); analogWrite(pin_motor_left_back,0-a); } else { analogWrite(pin_motor_left_forward,a); digitalWrite(pin_motor_left_back,LOW); } if(b<0) { digitalWrite(pin_motor_right_forward,LOW); analogWrite(pin_motor_right_back,0-b); } else { digitalWrite(pin_motor_right_back,LOW); analogWrite(pin_motor_right_forward,b); } } void setup() { pinMode (pin_center,INPUT);// pinMode (pin_right, INPUT);// pinMode (pin_left,INPUT);// pinMode (pin_center_right, INPUT);// pinMode (pin_center_left,INPUT);// pinMode (pin_line_left, INPUT); pinMode (pin_line_right, INPUT); pinMode (pin_start,INPUT);// pinMode (13,OUTPUT);// digitalWrite(13,HIGH); pinMode (pin_motor_left_back, OUTPUT);// pinMode (pin_motor_right_forward, OUTPUT);// pinMode (pin_motor_right_back, OUTPUT);// pinMode (pin_motor_left_forward,OUTPUT);// // while(!digitalRead(pin_start))continue; MOVE(200,200); } void loop() { GLAZ(); if(l && r) { if( (cl + cc + cr) < 2 || !cc ){ MOVE(255,255); } if( cc ) { if(!cl && cr) MOVE(0-180,180); if(cl && !cr) MOVE(180,0-180); } } else if( cc + cr + cl == 3 ) { if(!l && r) MOVE(0-200,200); if(!r && l) MOVE(200,0-200); } else if(cc) { if(!l && !cl && cr && r) MOVE(0-150,150); if(l && cl && !cr && !r) MOVE(150,0-150); } if(!digitalRead(pin_start))while(1){MOVE(0,0);} }
Anda hanya perlu meningkatkan kode.
Penting!Sensor mengembalikan 1 jika mereka tidak melihat apa pun, dan 0 jika ada hambatan.
Setelah mengunduh kode melalui usb, robot siap bersaing.
Layak dipertimbangkan
Pertama, ini adalah elemen-elemennya. Sensor yang kami gunakan (tajam 340) jarang atau tidak sama sekali. Karena itu, jika memungkinkan, maka Anda perlu mengambil banyak sekaligus atau menemukan analog yang cocok untuk parameter.
Kedua, tidak mungkin untuk menimbulkan kerusakan kritis pada robot musuh atau menggunakan magnet, misalnya, untuk mengambil. Ini sedikit membatasi kita dalam memilih cara untuk perjuangan.
Juga jangan lupa tentang rodanya. Kurva, tipis dan geser tidak akan berfungsi, Anda tidak akan bisa bermanuver dan momen kekuatan tidak cukup. Pastikan untuk menguji karetnya.
Ketika bekerja dengan mesin, perlu diingat bahwa mereka harus bekerja di bawah beban maksimum dan mereka akan cukup sering terbakar.
Ini juga masuk akal untuk membuat baterai yang dapat dilepas Robot keluar dengan sangat cepat, dan membutuhkan waktu lama untuk diisi ulang.
Daftar pembelian yang diperlukan:
1. Besi solder, solder, fluks (opsional)
2. Papan textolite (untuk etch, Anda harus menutup semua trek, kemudian memasukkan semuanya ke dalam larutan hidrogen peroksida + asam sitrat + garam selama beberapa jam, dan kemudian merobek kertas, misalnya, di mana trek disembunyikan)
3. Tajam 340 sensor
4. Mesin, pilih secukupnya, semakin banyak rpm, semakin baik.
Beberapa di antaranya
layak dipilih :
polulu. (ditambahkan)
5. Baterai (Saya menyarankan Anda untuk mengambil lithium-polimer) + stasiun pengisian daya
6. Tombol (tombol sakelar, disolder ke papan) dan elemen listrik (lihat gambar dengan tracing)
7. Pengemudi
8. Pengontrol, sebagai permulaan, Anda dapat mencoba mikro Polulu A-Star 32u4 dan mengisi bootloader Arduino
9. Lembaran logam untuk perumahan
10. Bor untuk melubangi papan
11. Peluncur dan untuk itu modul mulai
PS Jika Anda melewatkan sesuatu - tulis, saya akan memperbaikinya.
Persaingan
Kompetisi yang akan datang akan diadakan di St. Petersburg, Robofinist, jadi sekarang kami sedang bersiap-siap untuk mereka, dan jika Anda ingin mengambil bagian, Anda perlu melakukan semuanya dengan jelas dan cepat.
Tapi kompetisi ini bukan satu-satunya, ada banyak di Rusia, yang terbesar diadakan di Moskow. Sekitar sebulan sekali atau dua, Anda dapat mengalami kebahagiaan dan bersaing.
Kompetisi seperti di luar negeri tidak biasa dan kami juga ingin ke sana. Berikut ini perkiraan peta kompetisi dunia:

Kami sangat berharap bahwa di negara kami, robo-sumo hanya akan berkembang dan kami mengundang semua orang untuk berpartisipasi dalam pembuatan robot mereka sendiri.
Itu terlihat sangat epik ketika potongan-potongan dari beberapa robot terbang.Kami sedang menyelesaikan artikel pengantar ini untuk kami dan berharap semua orang sukses dalam robotika, kami akan senang melihat Anda di kompetisi!