
Halo komunitas GeekTimes yang terhormat! Setelah lama diam, saya ingin memperkenalkan proyek baru saya. OPENTadpole adalah aplikasi yang terdiri dari editor lengkap sistem saraf kecebong katak dan emulasi fisik tubuh kecebong dan lingkungan. Kemampuan untuk membuat, mengonfigurasi, dan mengedit koneksi hewan dari awal dan segera melihat bagaimana kreasi Anda tercermin dalam perilakunya.
Sekitar setahun yang lalu, serangkaian artikel yang ditujukan untuk pengembangan simulator sistem saraf telah selesai, dan aplikasi yang saya kembangkan memiliki sejumlah kekurangan, serta kode amatir tidak memungkinkan untuk memperluas dan mengembangkan fungsionalitas aplikasi tersebut. Perlu dicatat bahwa aplikasi yang dikembangkan pada waktu itu memungkinkan saya untuk menunjukkan dan mengerjakan mekanisme dasar dan platform teoritis dari sistem pemodelan. Diputuskan untuk memproses ulang kode, dari posisi representasi yang lebih akurat, entitas mana dan fungsinya akan hadir dalam versi final aplikasi.
Pertama, saya menggunakan mesin permainan Unity favorit saya untuk pengembangan saya, dan menghubungkan esensi elemen saraf dengan GameObject, logikanya dieksekusi di coroutines, yang, ketika jaringan ditingkatkan, menjadi masalah fatal, aplikasi sangat melorot karena hubungan dekat logika jaringan saraf dengan GameObject. bagian grafis dari aplikasi. Tentu saja, solusinya adalah untuk memisahkan bagian grafik dari logika sistem, logika harus dieksekusi di utas terpisah, dan bagian grafis hanya akan dapat secara berkala mengakses elemen jaringan untuk menampilkan perubahan yang terjadi. Pendekatan ini memberikan keuntungan lain, kemampuan untuk tidak hanya memantau proses yang terjadi dalam jaringan, tetapi untuk berinteraksi dengan hasil perhitungannya, jadi, katakanlah, rendam jaringan dalam agen virtual tertentu dan amati bagaimana agen ini berinteraksi dengan lingkungan eksternal.
Kedua, diputuskan untuk merevisi konsep editor, terlepas dari kenyataan bahwa 3D dianggap sebagai metode visualisasi yang lebih efektif, saya memutuskan untuk beralih ke 2D. Dulu saya berpikir bahwa makna kunci tertentu terletak pada organisasi tiga dimensi sistem saraf, dan, karena takut kehilangan sesuatu, saya berjuang untuk organisasi tiga dimensi editor dan sistem. Tapi sekarang, saya mengerti bahwa itu akan cukup untuk menerapkan konstruktif dari editor datar dengan tingkat atau lapisan, karena bahkan korteks serebral memiliki struktur berlapis, dan bekerja di pesawat memungkinkan pengguna akhir untuk lebih mudah menavigasi dan mengatur pekerjaan mereka dengan editor, terutama ketika datang ke besar array elemen.
Mengingat bahwa saya bekerja sendiri, dan pengembangan aplikasi di bidang sibernetika bukan kegiatan utama saya, pengembangan mulai berjalan lambat, dan pada saat yang sama saya ingin menunjukkan bagaimana saya dapat menerapkan ide-ide saya pada hewan dengan sistem saraf sederhana, seperti kerang, cacing atau sejenis serangga. Saya sangat suka proyek OpenWorm untuk membuat model komputer cacing Caenorhabditis elegans, yang sistem sarafnya terdiri dari 302 neuron, dan yang hubungannya sepenuhnya tersusun. Proyek ini terdiri dari dua bagian: memodelkan sifat-sifat listrik saraf dari sistem saraf cacing dan memodelkan sifat mekanik tubuhnya selama berenang. Saya menerapkan konsep ini pada proyek saya, referensi yang dapat dilihat atas nama proyek. Pilihan hewan simulasi dipengaruhi oleh rekaman pidato Matveevich Borisyuk Romawi, di mana ia berbicara tentang proyek untuk mensimulasikan sistem saraf dari dua hari katak kecebong. Terinspirasi oleh video ini, saya memutuskan untuk membuat beberapa cabang dalam pekerjaan pada simulator sistem saraf, yang disebut OPENTadpole.
Platform teoretis yang mengklaim dapat menjelaskan mekanisme sistem saraf harus bekerja baik pada skala sistem saraf sederhana dan pada skala sistem saraf yang melakukan fungsi kognitif. Seringkali Anda dapat menemukan komentar yang ditujukan kepada penulis teori ketinggalan jaman tentang fungsi otak yang sebelum memodelkan jaringan saraf berskala besar, mungkin bermanfaat untuk menunjukkan bagaimana teori mereka dapat diterapkan pada hewan sederhana dan sistem saraf mereka. Sebuah jawaban menghindar dapat didengar untuk komentar-komentar ini bahwa sifat-sifat neurosystems dimanifestasikan hanya pada skala yang sangat besar, raksasa, dan kehidupan makhluk primitif tidak signifikan ketika datang untuk menyelesaikan masalah kognitif. Ketidakadilan dan delusi semacam itu bagi saya menjadi alasan lain untuk berkonsentrasi pada kehidupan dan perilaku kecebong katak dua hari.
Hewan cybernetic dengan sistem saraf
Tentu saja, Manusia telah menciptakan banyak mekanisme cybernetic yang meniru aspek-aspek tertentu dari perilaku hewan, misalnya, bebek mekanis Vaucanson, yang tidak hanya melambaikan sayap mereka, mematuk pakan yang tersebar, tetapi juga memiliki semacam sistem pencernaan dengan semua proses yang menyertainya. Tetapi hewan tiruan dengan sistem saraf yang mirip dengan rekan biologisnya cukup langka. Mari kita lakukan tinjauan singkat tentang dunia hewan cybernetic sehingga menjadi jelas bagi Anda di mana begitu banyak keberanian berasal untuk menyebut kecebong Anda hewan cybernetic pertama dengan sistem saraf buatan.
Dan kita akan mulai bukan dengan binatang, tetapi dengan orang yang legendaris - Henry Markram. Henry Markam adalah seorang ilmuwan, yang dikenal banyak orang sebagai pelopor dalam studi koneksi sinaptik, ia adalah salah satu yang pertama yang mulai secara sistematis mempelajari versi konsisten dari aturan Hebb. Namun Henry Markram mendapatkan ketenaran nyata sebagai pencipta simulasi otak termahal di dunia. Para ilmuwan dan rekan-rekannya bukan saja merupakan pendanaan terbesar yang pernah dialokasikan untuk tujuan tersebut, tetapi juga sumber daya komputasi paling kuat dari
superkomputer Blue Gene dari IBM. Nama komputer memberi nama pertama pada proyek: "Blue Brain Project", pada 2013 namanya diganti menjadi "The Human Brain Project". Terlepas dari kenyataan bahwa nama proyek sekarang mengacu pada otak manusia, pekerjaan sedang berlangsung pada model fragmen kecil dari korteks otak tikus. Manajer proyek memiliki rencana besar, dimulai dengan sebuah bagian kecil dari otak tikus untuk mencapai model otak manusia yang lengkap. Kembali pada tahun 2009, Markam, kurator proyek, berjanji bahwa sepuluh tahun kemudian simulasi komputer dari seluruh otak manusia akan muncul. Banyak yang menganggap Henry Markram penipu, memang, jika Anda mendengarkan pidatonya, maka mereka lebih fokus pada investor kaya yang kurang berpengalaman dalam ilmu saraf daripada pada rekan ilmuwan mereka.
Dalam seluruh sejarah proyek, selain bahan-bahan grafis yang indah, flashing karangan bunga neuron, ada satu studi praktis yang berguna. Sekitar dua puluh model 3D jenis neuron tertentu diciptakan yang sepenuhnya mengulangi topologi neuron nyata, dengan mempertimbangkan semua tikungan dan cabang dendrit. Kemudian, wilayah kecil korteks dikonfigurasikan di mana model neuron yang disiapkan berada, menurut aturan tertentu, tetapi model neuron dipilih secara acak, kemudian statistik dikumpulkan dari model yang diperoleh: di mana dendrit bersilangan, pada jarak berapa dari tubuh sel, jenis kontak apa.
Statistik yang diperoleh dibandingkan dengan statistik yang serupa, tetapi diperoleh dari sistem saraf biologis dan memperoleh hasil yang sangat penting: pembentukan 80% koneksi sinaptik di korteks dapat terjadi kebetulan. Yaitu di mana ada dendrit, akson, agunan yang tumbuh bebas, sinapsis dapat terbentuk, dan tidak ada penanda kimia. Tentu saja, dalam beberapa kasus, selektivitas pembentukan sinapsis tidak dikecualikan, dan juga tidak mungkin untuk menarik kesimpulan tentang keacakan kualitas koneksi. Sinaps dapat terbentuk secara kebetulan selama pertumbuhan neuron, tetapi kekuatannya (berat) dapat ditentukan oleh aktivitas vital sistem saraf dan hewan.
Meskipun tidak mungkin untuk berbicara tentang tikus virtual cybernetic dalam kerangka Proyek Otak Manusia, model otak tikus skala penuh masih jauh. Karena sumber daya IBM, peneliti lain Dharmendra Mohda pada tahun 2009 mengumumkan peluncuran proyek untuk membuat simulasi digital otak kucing. Pernyataan ini menyebabkan banyak kemarahan di Markram, yang menghasilkan bentuk surat terbuka yang marah kepada kepala teknolog IBM. Tidak ada yang suka kompetisi, tetapi kami lebih suka melihatnya dalam pertarungan kucing dan tikus virtual daripada menarik perhatian kepala IBM, kepala imitasi mahal. Setelah bertahun-tahun, perubahan signifikan dan perkembangan di bidang imitasi otak mamalia tidak terjadi.
OpenWorm adalah proyek yang sangat terkenal untuk membuat model simulasi nematoda (cacing gelang) dari spesies Caenorhabditis elegans, cacing ini terkenal karena fakta bahwa ini adalah satu-satunya spesies hewan yang koneksi lengkap dari sistem sarafnya terdiri dari 302 neuron dan sekitar 7.000 koneksi sinaptik. Bahkan untuk sistem saraf sekecil itu c. elegan yang menghubungkan ternyata menjadi karya raksasa. Pertama, cacing menjadi sasaran prosedur kompleks - mikroskopi serial, menciptakan serangkaian foto bagian melintang tubuh. Itu perlu untuk membuat sangat tipis, beberapa bagian mikron, kemudian menggunakan mikroskop elektron untuk membuat gambar resolusi tinggi. Dengan cacing dewasa yang panjangnya 1-2 mm, ini ternyata menjadi tugas yang sulit, atlas foto yang tersedia terdiri dari 3 cacing, karena sistem saraf c. elegans memiliki stabilitas dan pengulangan yang luar biasa. Kedua, butuh lebih dari tujuh tahun studi yang melelahkan dari gambar, tim ilmuwan, untuk menyusun peta koneksi sistem saraf, penyesuaian masih dilakukan untuk database yang dihasilkan.
Sayangnya, tidak mungkin untuk menentukan jenis dan kekuatan koneksi sinaptik dalam foto, akibatnya, kami memiliki deskripsi koneksi tanpa mengetahui tujuan fungsionalnya.
Langkah selanjutnya dalam memahami sifat sistem saraf c. elegans menjadi upaya untuk membuat simulasi komputer dari worm. Model digital nyaman karena eksperimen dapat mengubah dan memilih pengaturan elemen-elemennya, sehingga pekerjaan seluruh model dapat dibandingkan dengan analog biologis, yang memungkinkan untuk mengidentifikasi beberapa undang-undang organisasi dan operasi sistem saraf organisme yang hidup menggunakan seleksi empiris. Tentu saja, tanpa teori umum tentang sistem saraf, tanpa platform teoretis, pencarian hukum semacam itu adalah tugas yang sangat sulit, solusinya secara alami dapat berlanjut.
Proyek ini mendapatkan ketenaran khusus selama
kickstarter perusahaan pada tahun 2014 . Komunitas OpenWorm sangat bermanfaat:
atlas tiga dimensi dari nematoda dibuat , di mana sistem saraf bekerja secara detail - setiap neuron ditunjuk; sistem pemodelan dan visualisasi
geppetto yang dibuat dan dikembangkan secara luas; simulasi sifat-sifat mekanik tubuh cacing dan lingkungan eksternal - Sibernetic, tempat rekan kerja kita bekerja. Tetapi nematoda cybernetic yang bergerak bebas yang dikendalikan oleh sistem saraf belum muncul. Beberapa refleks sederhana yang terkait dengan penggerak (gerakan) dan penarikan ketika menyentuh bagian depan tubuh dimodelkan, tetapi sebagian besar sirkuit saraf dan perilaku nematoda yang terkait dengannya tetap belum dieksplorasi.
Salah satu video Sibernetic terbaru dari saluran Andrei Palyanov, berenang nematoda di dua lingkungan yang berbeda, kontrol dilakukan menggunakan sinyal periodik sederhana, tanpa partisipasi neuron virtual.
Proyek berikutnya memberi kesan besar pada saya, setelah menonton video berikutnya dengan pidato oleh Roman Matveevich Borisyuk, saya memutuskan untuk memilih kecebong sebagai hewan model dalam proyek saya.
Proyek
tadpoles.org.uk yang kurang dikenal, dengan sederhana menjelaskan beberapa prinsip dasar dan hukum organisasi sistem saraf. Para ilmuwan telah menciptakan model untuk pengembangan sistem saraf, pembentukannya pada periode awal perkembangan hewan. Pertama, sebuah model dihasilkan: dendrit dan akson tumbuh dari neuron menurut aturan tertentu yang memperhitungkan beberapa parameter tubuh kecebong dengan tingkat probabilitas tertentu yang memengaruhi arah pertumbuhan proses, kemudian membentuk sinapsis pada titik-titik kontak antara dendrit dan akson dari sel yang berbeda. Di final, model dapat diaktifkan dan itu akan menunjukkan aktivitas yang mirip dengan aktivitas sistem saraf kecebong yang hidup di bagian yang bertanggung jawab untuk berenang.
Ternyata bahwa agar sistem saraf terbentuk dengan semua refleks dan mekanisme bawaan, perlu bahwa instruksi yang agak sederhana diikuti oleh sel-sel saraf. Bergantung pada lokasi dan afiliasinya dengan akumulasi sel tertentu - ganglia, sel harus menumbuhkan dendrit dan akson pada arah tertentu, serta membentuk kontak sinoptik dengan sel dan prosesnya yang terletak pada jarak tertentu dari tubuh sel, tanpa selektivitas. Kesalahan yang dihasilkan dalam struktur jaringan saraf karena penyimpangan dalam arah pertumbuhan proses ketika mengatasi hambatan yang mungkin dikompensasi oleh kehadiran neuron dan proses yang berlebihan.
Untuk tindakan berenang, kontraksi seperti gelombang otot di sepanjang tubuh, kecebong membutuhkan sekitar 1.500 neuron, untuk nematoda kurang dari tiga ratus. Kecebong katak adalah hewan yang lebih kompleks dan berkembang secara evolusi, dibandingkan dengan cacing gelang, dan peningkatan jumlah neuron di sini terhubung, bukan dengan kebutuhan untuk meningkatkan daya komputasi, tetapi dengan keandalan sistem dan kompensasi untuk ketidaktepatan neuron sebagai elemen komputasi. Beberapa peneliti menghubungkan sifat-sifat komputer kuantum atau kalkulator canggih dengan neuron individu, tetapi ini pada dasarnya salah, neuron adalah, pertama-tama, sel biologis, dengan kesalahan bawaan dalam pekerjaan dan ketidakstabilan. Oleh karena itu, tidak masuk akal untuk menghabiskan waktu merekonstruksi semua 86 miliar neuron otak manusia, akan lebih tepat untuk mengemas neuron secara struktural ke dalam neuroelements tertentu yang melakukan tugas fungsional yang ditugaskan pada kelompok neuron.
Hal utama adalah pendekatan yang tepat
Anda dapat menghabiskan banyak waktu, uang, dan upaya untuk menciptakan model kompleks sistem yang kompleks tanpa memperoleh hasil yang praktis berarti jika dasar tersebut tidak ditetapkan untuk ide yang akurat tentang operasi setiap elemen sistem dan fungsi apa yang dijalankan elemen-elemen ini dalam keseluruhan sistem secara keseluruhan. Idealnya, Anda perlu mengetahui hasil model sebelum mulai membuatnya kembali, inilah yang menentukan keberhasilan dalam menyelesaikan tugas, dan bukan keberadaan superkomputer dan bantuan keuangan yang hebat.
Sekarang banyak perhatian diberikan pada jaringan saraf, yang menunjukkan efisiensi tinggi dan manfaat praktis yang luar biasa. Awalnya, jaringan saraf diposisikan sebagai model jaringan saraf biologis tertentu, tetapi seiring berjalannya waktu dan perkembangan neurobiologi, menjadi jelas bahwa hanya nama yang memiliki kesamaan antara neuron formal yang digunakan di NS dan biologis. Jaringan saraf modern adalah alat matematika yang kuat untuk analisis statistik. Posisi NS ini dalam pengembangan mereka yang akan memberikan efisiensi yang lebih besar. Analisis statistik dan pemrosesan sejumlah besar data, bukan model sistem saraf. Ada kemungkinan bahwa beberapa jenis kecerdasan buatan dapat muncul di platform NS, tetapi jika kita berusaha untuk menciptakan kecerdasan seperti manusia, kita harus memperhatikan jaringan saraf biologis.
Jaringan saraf telah membuktikan keefektifannya yang luar biasa dalam memecahkan masalah-masalah tertentu dibandingkan dengan manusia, dan diharapkan perkembangan mereka berlanjut. Sebagai peneliti otak, saya akan lebih mengandalkan mesin yang digerakkan oleh jaringan saraf yang berkembang dengan baik daripada mesin yang digerakkan oleh model virtual jaringan saraf yang mirip dengan biologis. Faktanya adalah bahwa mekanisme otak pada awalnya mengandung unsur ketidaktepatan dan persepsi terbatas, yang secara alami menyebabkan kesalahan, tetapi di sisi lain, mekanisme yang sama ini memberikan potensi besar untuk kreativitas dan adaptasi.
Model matematika dominan yang digunakan dalam penciptaan sistem saraf yang serupa secara biologis adalah model Hodgkin-Huxley, yang dijelaskan kembali pada tahun 1952. Dengan satu atau lain cara, model ini digunakan baik dalam Proyek Otak Manusia, dan dalam OpenWorm, dan di tadpoles.org.uk. Model Hodgkin-Huxley adalah sistem persamaan yang menggambarkan osilasi muatan yang terjadi pada permukaan membran neuron, sistem persamaan diadopsi dan diadaptasi dari teknik elektro dalam hal deskripsi osilasi diri dalam rangkaian osilasi listrik. Alan Lloyd Hodgkin dan Andrew Huxley menambahkan beberapa elemen tambahan dan sejumlah koefisien pada sistem persamaan, memilih mereka sehingga hasil pekerjaan mereka dibandingkan dengan data eksperimental yang diperoleh oleh mereka ketika mempelajari cumi-cumi akson.
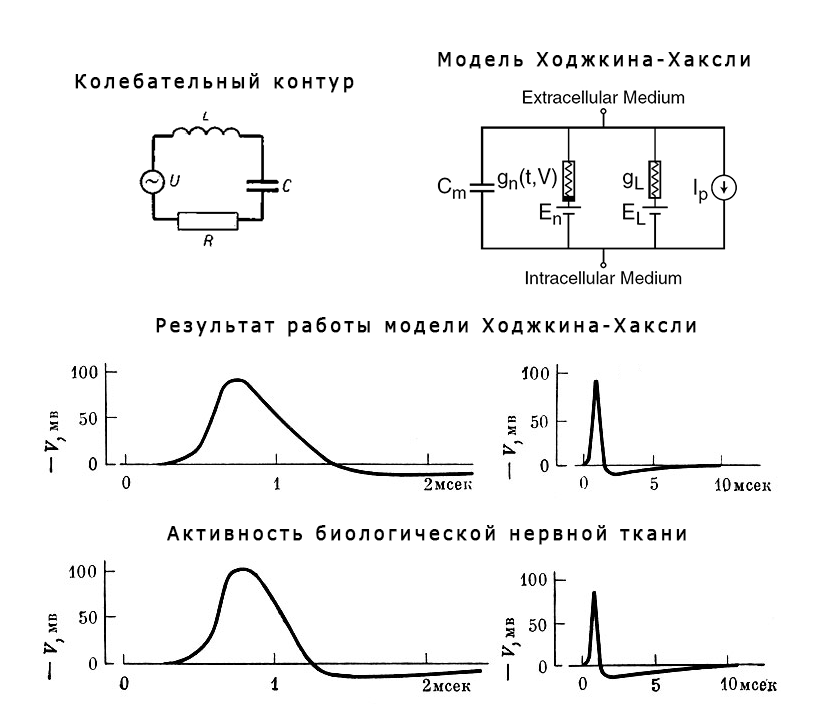 Sistem persamaan Hodgkin-Huxley menggambarkan perubahan potensial hanya pada satu titik membran, untuk mendapatkan gambar propagasi eksitasi melintasi membran dan proses neuron, Anda dapat membagi model neuron menjadi beberapa primitif, atau memilih titik berjarak sama di atasnya dan mempertimbangkan sistem persamaan pada setiap titik tersebut. Model Hodgkin-Huxley sangat realistis, menunjukkan distribusi potensi aksi di atas badan stand, tetapi model tersebut membutuhkan sumber daya komputasi yang besar.Dalam pekerjaan saya, saya melakukan semacam rekayasa ulang sistem saraf, menyoroti yang signifikan dan membuang atau menyederhanakan proses dan fenomena terkait tertentu. Sifat sistem saraf dan sel-sel saraf sangat beragam dan kompleks, ada banyak reaksi kimia, proses dan fenomena intraseluler, tetapi Anda tidak boleh mentransfer semuanya ke model, pertama-tama Anda perlu memahami makna dan tujuan fungsional dari fenomena tersebut, jika tidak maka akan menjadi komplikasi yang tidak berarti dari model.Apa signifikansi fungsional dari penyebaran aksi potensial di sepanjang membran neuron? - Transfer informasi dari satu bagian sel saraf ke yang lain. Informasi bahwa sel saraf telah diaktifkan melalui reseptor atau sinapsis harus sampai ke ujung akson, mengatasi seluruh panjangnya, yang dapat mencapai hingga satu meter di tubuh manusia. Apa yang penting dalam proses ini? - Waktu dari mulai aktivasi, hingga transfer informasi tentang ini, ke area target jaringan saraf. Rata-rata, kecepatan rambatan potensial aksi adalah 1 m / s, tergantung pada berbagai faktor, misalnya, pada derajat mielinisasi akson. Dengan demikian, dalam kondisi yang berbeda, waktu tunda mungkin berbeda. Model Hodgkin-Huxley sangat realistis mensimulasikan proses propagasi impuls saraf di sepanjang membran,tetapi apakah perincian seperti itu diperlukan ketika membuat model fungsional sistem saraf?Jika kita dapat menyederhanakan sesuatu, itu berarti kita memahami sesuatu. Gagasan penyederhanaan menjadi hukum dan fungsi sederhana, alokasi utama dan pemisahannya dari yang sekunder, dapat disebut pendekatan fungsional.
Sistem persamaan Hodgkin-Huxley menggambarkan perubahan potensial hanya pada satu titik membran, untuk mendapatkan gambar propagasi eksitasi melintasi membran dan proses neuron, Anda dapat membagi model neuron menjadi beberapa primitif, atau memilih titik berjarak sama di atasnya dan mempertimbangkan sistem persamaan pada setiap titik tersebut. Model Hodgkin-Huxley sangat realistis, menunjukkan distribusi potensi aksi di atas badan stand, tetapi model tersebut membutuhkan sumber daya komputasi yang besar.Dalam pekerjaan saya, saya melakukan semacam rekayasa ulang sistem saraf, menyoroti yang signifikan dan membuang atau menyederhanakan proses dan fenomena terkait tertentu. Sifat sistem saraf dan sel-sel saraf sangat beragam dan kompleks, ada banyak reaksi kimia, proses dan fenomena intraseluler, tetapi Anda tidak boleh mentransfer semuanya ke model, pertama-tama Anda perlu memahami makna dan tujuan fungsional dari fenomena tersebut, jika tidak maka akan menjadi komplikasi yang tidak berarti dari model.Apa signifikansi fungsional dari penyebaran aksi potensial di sepanjang membran neuron? - Transfer informasi dari satu bagian sel saraf ke yang lain. Informasi bahwa sel saraf telah diaktifkan melalui reseptor atau sinapsis harus sampai ke ujung akson, mengatasi seluruh panjangnya, yang dapat mencapai hingga satu meter di tubuh manusia. Apa yang penting dalam proses ini? - Waktu dari mulai aktivasi, hingga transfer informasi tentang ini, ke area target jaringan saraf. Rata-rata, kecepatan rambatan potensial aksi adalah 1 m / s, tergantung pada berbagai faktor, misalnya, pada derajat mielinisasi akson. Dengan demikian, dalam kondisi yang berbeda, waktu tunda mungkin berbeda. Model Hodgkin-Huxley sangat realistis mensimulasikan proses propagasi impuls saraf di sepanjang membran,tetapi apakah perincian seperti itu diperlukan ketika membuat model fungsional sistem saraf?Jika kita dapat menyederhanakan sesuatu, itu berarti kita memahami sesuatu. Gagasan penyederhanaan menjadi hukum dan fungsi sederhana, alokasi utama dan pemisahannya dari yang sekunder, dapat disebut pendekatan fungsional.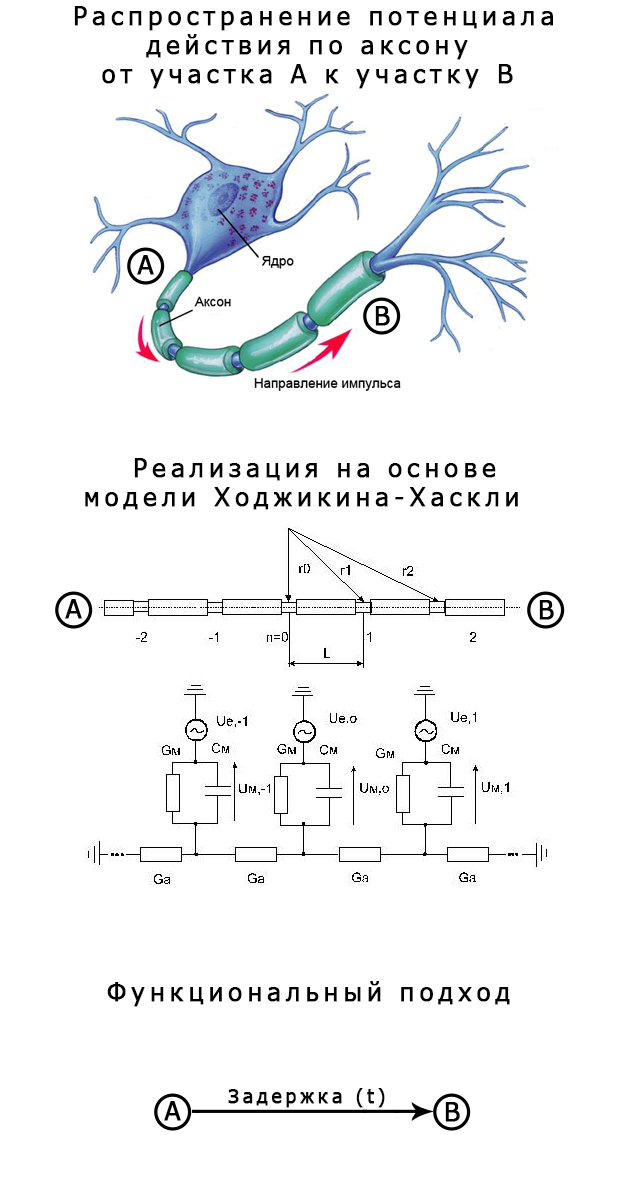 Jika Anda mencoba mensimulasikan otak manusia dengan semua 86 miliar neuron, mengulangi topologi proses, dan bahkan salah menghitung sistem persamaan Hodgkin-Huxley dalam grid titik padat pada permukaan neuron, maka semua sumber daya komputasi di planet Bumi tidak akan cukup. Dan membuat prediksi tentang penampilan model seperti itu, Anda dapat fokus pada dua puluh tahun sebelumnya, dan setelah tahun-tahun ini, dua puluh tahun lagi. Ya, penyebaran potensi aksi tidak semuanya, Anda masih perlu memahami logika interaksi neuron, untuk menyelesaikan masalah ini, sebagai permulaan, saya berkonsentrasi pada sistem saraf yang cukup sederhana, seperti sistem saraf cacing atau kecebong katak.
Jika Anda mencoba mensimulasikan otak manusia dengan semua 86 miliar neuron, mengulangi topologi proses, dan bahkan salah menghitung sistem persamaan Hodgkin-Huxley dalam grid titik padat pada permukaan neuron, maka semua sumber daya komputasi di planet Bumi tidak akan cukup. Dan membuat prediksi tentang penampilan model seperti itu, Anda dapat fokus pada dua puluh tahun sebelumnya, dan setelah tahun-tahun ini, dua puluh tahun lagi. Ya, penyebaran potensi aksi tidak semuanya, Anda masih perlu memahami logika interaksi neuron, untuk menyelesaikan masalah ini, sebagai permulaan, saya berkonsentrasi pada sistem saraf yang cukup sederhana, seperti sistem saraf cacing atau kecebong katak.Pengembangan
Anda tidak berharap bahwa penggunaan mesin game dalam model ilmiah dapat menyebabkan rasa kewaspadaan di depan umum? - pertanyaan serupa diajukan kepada saya oleh seorang pengguna Internet yang luar biasa. Ya, saya tidak menggunakan sistem standardisasi apa pun, saya tidak menggunakan bahasa untuk menggambarkan struktur biologis, hanya karena itu memerlukan banyak waktu untuk mempelajari materi yang menyertainya. Saya bukan seorang ilmuwan, tetapi ledakan biasa dengan kehidupan yang dinamis dan sibuk, tetapi dengan banyak ide, kreativitas dan keinginan untuk implementasi. Oleh karena itu, waktu antara kehidupan keluarga, pekerjaan dan tidur diberikan untuk pemodelan dengan cara yang tersedia. Mesin permainan Unity hanyalah alat dalam pekerjaan saya, dan sangat bagus dan nyaman dalam hal visualisasi.Seluruh proyek OPENTadpole hanya terdiri dari dua adegan: editor koneksi dan simulasi lingkungan. Tidak ada masalah serius dengan editor selama proses pengembangan, karena sudah ada pengalaman bekerja pada versi simulator sistem saraf sebelumnya .Tugas utama pada tahap ini adalah pemisahan implementasi logika elemen saraf dan visualisasi, yang dilaksanakan.Pada tahap selanjutnya, saya beralih untuk bekerja pada simulator lingkungan, dan dengan cepat mengimplementasikan tubuh kecebong dari komponen Unity standar. Tubuh berudu terdiri dari 9 segmen, saling berhubungan oleh sendi, beberapa pasangan kinematik virtual dan sepasang otot virtual di kedua sisi. Otot virtual memiliki elastisitas tertentu, yang memberikan elastisitas ke seluruh tubuh. Fungsi otot disubordinasikan ke sistem saraf virtual, yang dimuat melalui menyimpan file, yang umum untuk editor dan untuk mensimulasikan lingkungan.
Fungsi otot disubordinasikan ke sistem saraf virtual, yang dimuat melalui menyimpan file, yang umum untuk editor dan untuk mensimulasikan lingkungan.Kecebong bulat dalam vakum .gif Pengembangan lebih lanjut membutuhkan penambahan sistem yang mensimulasikan sifat fisik medium, yang bukan tugas yang mudah bagi saya. Pada titik tertentu, saya bahkan menyesal bahwa unggas air dipilih sebagai hewan contoh. Dan tentu saja, keuntungan besar menggunakan mesin permainan yang sangat populer adalah bahwa banyak add-on, perpustakaan, dan aset telah dibuat dan dikembangkan untuk itu. Saya mencoba bekerja dengan beberapa perpustakaan, tetapi LiquidPhysics2D ternyata yang terbaik. Tidak ada tautan resmi ke perpustakaan, situs perusahaan pengembang tidak lagi berfungsi, tetapi Anda dapat menemukannya jika mau, google untuk membantu. Perpustakaan ini didasarkan pada mesin Box2D yang terkenal dan sangat dioptimalkan dan mudah digunakan, dengan banyak contoh, jadi saya berhasil menggunakannya, walaupun saya harus menaruh banyak ketekunan.Itu perlu untuk mengulang tubuh kecebong menggunakan elemen perpustakaan.Perhitungan real-time dari sifat fisik cairan memerlukan daya komputasi yang tinggi, oleh karena itu, bahkan menggunakan perpustakaan yang dioptimalkan dengan baik, operasi aplikasi yang stabil dapat diperoleh dengan membatasi dirinya pada beberapa ribu partikel.Saya ingin melihat kecebong yang mengambang bebas di area yang cukup luas, ruang terbatas yang kuat tidak memungkinkan saya untuk sepenuhnya menghargai model. Diputuskan untuk secara dinamis membuat dan menghilangkan partikel di area kecebong di sekitarnya, perlu untuk membagi ruang menjadi area persegi khusus dan untuk mengatur penampilan dan penghapusan partikel di dalamnya tergantung pada posisi kecebong tersebut.Untuk mencegah pengguna dari dipermalukan oleh kotak menari, visibilitas partikel terbatas, menghasilkan semacam aura menampilkan partikel di sekitar tubuh kecebong, yang dapat dimatikan dengan kunci F12.Hasil
Tujuan dari proyek tersebut adalah untuk mengidentifikasi beberapa aturan umum untuk organisasi sistem saraf dan hukum interaksi neuron yang menentukan perilaku hewan. Proyek OPENTadpole dalam hal ini dapat disebut selesai sepenuhnya, semua orang dapat mencoba dirinya dalam peran Sang Pencipta dan mengisi tubuh kosong dari kecebong virtual dengan sistem saraf dari awal, memungkinkan dia untuk secara aktif bergerak di ruang dan berinteraksi dengan lingkungan, dan hidup di dunianya yang ketat dan terbatas. Memang, sementara perkembangan sedang berlangsung, saya menerima banyak emosi positif, melihat bagaimana tindakan saya membuat perilaku kecebong lebih hidup.Arsip dengan aplikasi ini memiliki panduan yang sangat baik dan berwarna-warni yang menggambarkan aspek-aspek utama program, serta menjelaskan sejumlah contoh penghematan yang akan membantu Anda memahami prinsip-prinsip sistem saraf (tautan di akhir artikel). Model ini didasarkan pada prinsip-prinsip yang sama yang saya bicarakan dalam publikasi saya sebelumnya ( bagian 1 , bagian 2 ), dan tidak ada spekulasi tentang interaksi elektromagnetik neuron, hanya apa yang ditulis oleh pikiran-pikiran hebat dan menerima hadiah Nobel. Segala sesuatu dalam kerangka doktrin ilmiah, tetapi diwujudkan dalam bentuk ringkas baru, dapat digunakan sebagai alat pengajaran.Berenang
Rantai saraf yang bertanggung jawab untuk berenang didasarkan pada generator aktivitas yang dipesan, generator tersebut ditemukan di semua sistem saraf hewan sederhana, ini adalah rantai neuron tertutup yang mampu menghasilkan eksitasi ritmis tanpa umpan balik.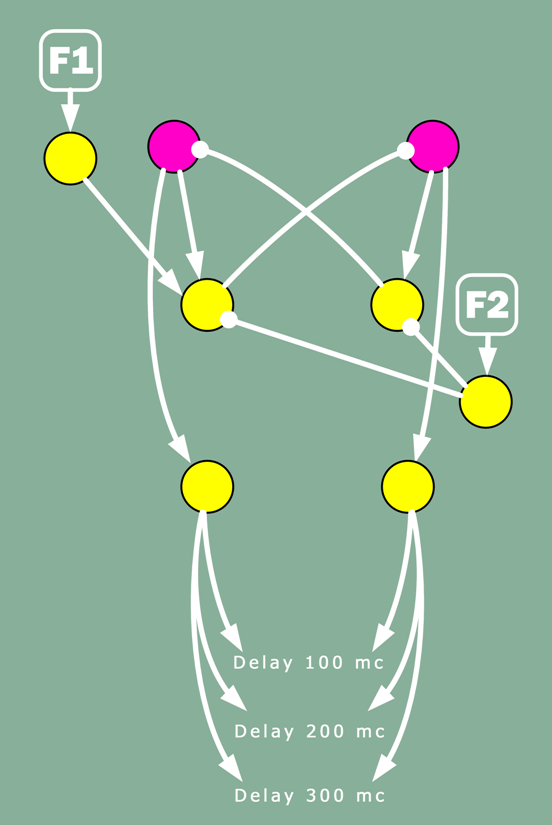 Skema generator aktivitas teratur dari kecebong katak diwakili oleh empat neuron yang terletak secara simetris dalam tubuh kecebong tersebut. Dua neuron (dIN, violet) di sirkuit ini memiliki fitur spesifik, mereka keluar dari penghambatan, menciptakan lonjakan aktivitas. Setiap neuron tersebut mengaktifkan neuron penghambatan (inhibitor), yang pada gilirannya memiliki efek silang pada neuron dIN. Dengan demikian, sirkuit tertentu dari sirkulasi rangsangan saraf diperoleh. Dimungkinkan untuk memulai generator ini menggunakan aktivasi tunggal dari salah satu neuron generator, dan dimungkinkan untuk menghentikan operasi generator jika aktivasi salah satu neuron rantai dicegah oleh efek penghambatan yang lebih kuat.Untuk melakukan percobaan dalam sistem OPENTadpole, 4 kunci reseptor F1, F2, F3 dan F4 dialokasikan, dalam contoh save, generator memulai reseptor F1, aktivitas di dalamnya ditekan oleh F2.Aktivitas generator didistribusikan secara bergantian di sisi kanan dan kiri sepanjang tubuh kecebong, ke setiap motor neuron mulai dari kepala hingga ujung ekor, eksitasi datang dengan penundaan 100 milidetik, ini disebabkan oleh fakta bahwa penyebaran eksitasi memiliki kecepatan yang terbatas. Kecepatan rambatan eksitasi pada akson yang berbeda dapat bervariasi, pada akson dengan tingkat mielinisasi yang lebih tinggi (lapisan mielin yang lebih tebal), kecepatannya akan lebih tinggi. Sebagai contoh, dalam tubuh cumi-cumi terdapat beberapa akson terbesar, dengan diameter hampir 1 mm, yang berpartisipasi dalam refleks pelarian pelindung, ketika cumi-cumi, mundur dari bahaya yang mungkin terjadi dengan jamur ekor yang cepat dan kuat, melarikan diri dari bahaya yang mungkin terjadi, diperlukan laju transmisi sinyal tinggi di sini.Ada banyak generator serupa dalam sistem saraf kecebong biologis, mereka terletak di sepanjang tubuh dan terhubung secara seri satu sama lain. Jika hanya satu generator yang hadir dalam sistem saraf kecebong, ini akan membuat risiko besar, kerusakan pada satu neuron, atau bahkan satu sinaps dari sirkuit ini, akan menyebabkan hilangnya kemampuan untuk bergerak. Untuk simulasi komputer tidak ada masalah seperti itu, oleh karena itu, satu model cukup untuk model.
Skema generator aktivitas teratur dari kecebong katak diwakili oleh empat neuron yang terletak secara simetris dalam tubuh kecebong tersebut. Dua neuron (dIN, violet) di sirkuit ini memiliki fitur spesifik, mereka keluar dari penghambatan, menciptakan lonjakan aktivitas. Setiap neuron tersebut mengaktifkan neuron penghambatan (inhibitor), yang pada gilirannya memiliki efek silang pada neuron dIN. Dengan demikian, sirkuit tertentu dari sirkulasi rangsangan saraf diperoleh. Dimungkinkan untuk memulai generator ini menggunakan aktivasi tunggal dari salah satu neuron generator, dan dimungkinkan untuk menghentikan operasi generator jika aktivasi salah satu neuron rantai dicegah oleh efek penghambatan yang lebih kuat.Untuk melakukan percobaan dalam sistem OPENTadpole, 4 kunci reseptor F1, F2, F3 dan F4 dialokasikan, dalam contoh save, generator memulai reseptor F1, aktivitas di dalamnya ditekan oleh F2.Aktivitas generator didistribusikan secara bergantian di sisi kanan dan kiri sepanjang tubuh kecebong, ke setiap motor neuron mulai dari kepala hingga ujung ekor, eksitasi datang dengan penundaan 100 milidetik, ini disebabkan oleh fakta bahwa penyebaran eksitasi memiliki kecepatan yang terbatas. Kecepatan rambatan eksitasi pada akson yang berbeda dapat bervariasi, pada akson dengan tingkat mielinisasi yang lebih tinggi (lapisan mielin yang lebih tebal), kecepatannya akan lebih tinggi. Sebagai contoh, dalam tubuh cumi-cumi terdapat beberapa akson terbesar, dengan diameter hampir 1 mm, yang berpartisipasi dalam refleks pelarian pelindung, ketika cumi-cumi, mundur dari bahaya yang mungkin terjadi dengan jamur ekor yang cepat dan kuat, melarikan diri dari bahaya yang mungkin terjadi, diperlukan laju transmisi sinyal tinggi di sini.Ada banyak generator serupa dalam sistem saraf kecebong biologis, mereka terletak di sepanjang tubuh dan terhubung secara seri satu sama lain. Jika hanya satu generator yang hadir dalam sistem saraf kecebong, ini akan membuat risiko besar, kerusakan pada satu neuron, atau bahkan satu sinaps dari sirkuit ini, akan menyebabkan hilangnya kemampuan untuk bergerak. Untuk simulasi komputer tidak ada masalah seperti itu, oleh karena itu, satu model cukup untuk model.Manuver
Berudu memiliki kemampuan untuk mengubah arah renangnya, melakukan beberapa manuver, untuk ini, pada saat berenang, perlu bahwa otot-otot di sisi yang berudu berniat untuk mengubah kontrak lebih atau lebih intensif, sambil mempertahankan frekuensi kontraksi yang sama.Sinyal dalam sistem saraf, untuk semua hewan, dapat dikatakan diskrit. Amplitudo potensial aksi selalu dan di mana-mana stabil, sinyal itu sendiri memiliki karakter pendek, seperti puncak, tetapi pada saat yang sama kita dapat dengan mudah mengubah tingkat ketegangan pada otot, cukup lancar dan akurat, semuanya ditentukan oleh frekuensi perintah yang dikirim ke kelompok otot. Semakin sering nadi, semakin kuat kontraksi otot. Dengan demikian, mengendalikan frekuensi impuls pengaktif, sistem saraf mengontrol kelompok otot, dan cukup fleksibel.Mekanisme sederhana penjumlahan temporal neuron memudahkan untuk mengontrol frekuensi denyut nadi dengan mengubah ambang batas penambah. Tingkat ambang penjumlahan dalam neuron biologis ditentukan oleh konfigurasi umumnya, ukuran neuron, jumlah dan kepadatan reseptor pada membran postsinaptik, jumlah dan kepadatan saluran ion pada membran, secara umum, dari metabolisme sel saraf. Dan semua parameter ini dapat secara aktif berubah dalam sel hidup di bawah pengaruh efek modulasi padanya.Kita telah lama terbiasa dengan fakta bahwa ketika menggambarkan kerja sistem saraf, mereka hanya berbicara tentang dua jenis efek sinaptik: stimulasi dan penghambatan. Tetapi sebenarnya ini adalah ketidakakuratan fatal yang mendistorsi pemahaman prinsip-prinsip sistem saraf. Dalam karyanya, ilmuwan ilmu saraf Amerika Eric Kandel menggambarkan mekanisme molekuler paparan sinaptik yang mengarah pada perubahan metabolisme dalam sel dan sinaps, yang pada 2000 ia dianugerahi Hadiah Nobel. Modulasi neuron dan mekanisme modulasi telah lama digunakan dalam deskripsi prinsip-prinsip sistem saraf, karena mekanisme ini memainkan peran penting dalam kerjanya.Model membedakan jenis koneksi sinaptik yang terpisah, yang dapat memengaruhi tingkat ambang penambah, untuk periode waktu tertentu - sinaps modulasi. Jika Anda memodulasi, menurunkan ambang batas penambah pada neuron termodulasi interkalasi (hijau dalam skema berikut), ini akan mengarah pada peningkatan sensitivitasnya, dan setelah aktivasi itu tidak akan menghasilkan lonjakan tunggal, tetapi serangkaian pulsa. Dengan demikian, mengubah sinyal dari generator, dimungkinkan untuk melakukan manuver, berubah saat berenang. Jika dengan cara ini neuron di kedua sisi dimodulasi pada saat yang sama, maka berudu hanya akan berenang maju lebih aktif.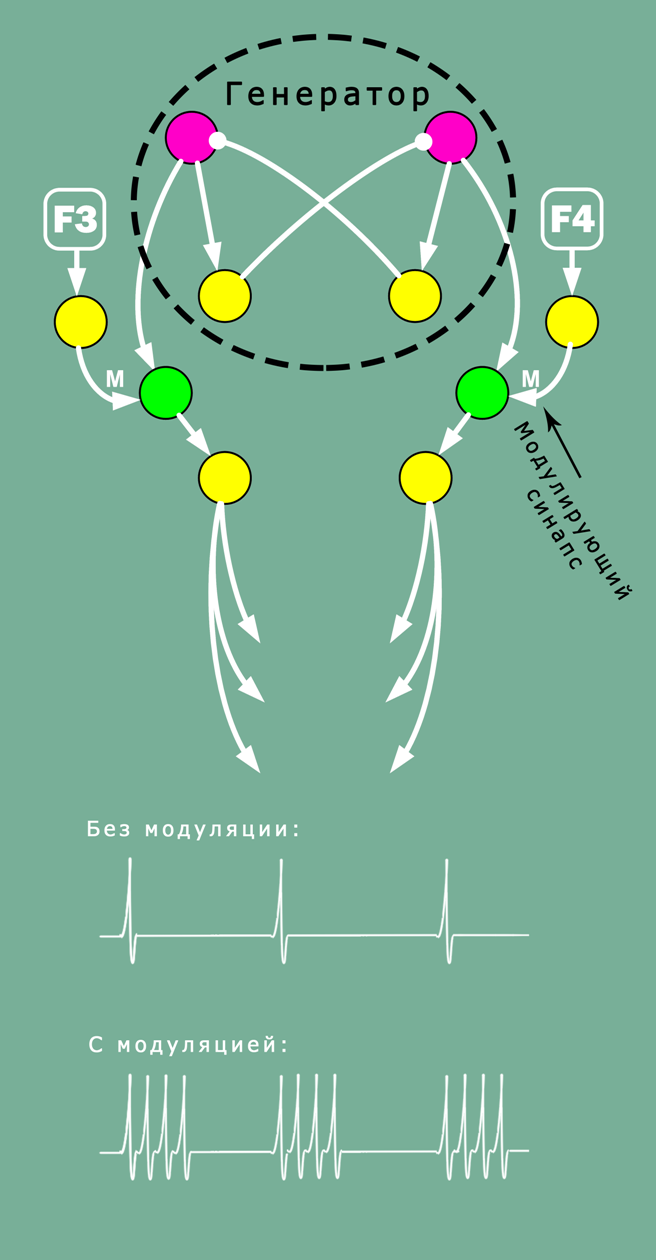 Topik modulasi dalam sistem saraf sangat luas, meskipun pada kenyataan bahwa dalam model ini saya membatasi diri untuk mengendalikan tingkat ambang aktivasi. Mengingat perubahan yang dapat terjadi secara dinamis dalam sistem saraf, dapat dikatakan bahwa modulasi bisa sangat beragam, termasuk perubahan kekuatan sinapsis, perubahan plastisitas, tingkat kecanduan, waktu penundaan sinoptik, dan sifat metabolisme sel.Kontrol menggunakan sinapsis modulasi, serta mengendalikan operasi generator, memungkinkan untuk menerapkan beberapa refleks pelindung, misalnya, mulai berenang ketika kecebong menyentuh kepala dan menyimpang ke arah yang berlawanan dari kontak, yang memungkinkan kecebong berenang bebas di akuarium virtual, berlayar dari dindingnya.
Topik modulasi dalam sistem saraf sangat luas, meskipun pada kenyataan bahwa dalam model ini saya membatasi diri untuk mengendalikan tingkat ambang aktivasi. Mengingat perubahan yang dapat terjadi secara dinamis dalam sistem saraf, dapat dikatakan bahwa modulasi bisa sangat beragam, termasuk perubahan kekuatan sinapsis, perubahan plastisitas, tingkat kecanduan, waktu penundaan sinoptik, dan sifat metabolisme sel.Kontrol menggunakan sinapsis modulasi, serta mengendalikan operasi generator, memungkinkan untuk menerapkan beberapa refleks pelindung, misalnya, mulai berenang ketika kecebong menyentuh kepala dan menyimpang ke arah yang berlawanan dari kontak, yang memungkinkan kecebong berenang bebas di akuarium virtual, berlayar dari dindingnya.Kemana berlayar?
Berudu belajar berenang, dan dapat dengan bebas memilih arah, tetapi untuk memilih arah ini dia membutuhkan tujuan, dan tujuan semacam itu dibenarkan, mungkin makanan. Untuk mendeteksi makanan, kecebong memiliki dua reseptor penciuman khusus, dipisahkan oleh garis khusus, "jembatan hidung", di mana reseptor tidak dapat merasakan keberadaan makanan. Semakin dekat makanan, semakin sering reseptor diaktifkan dengan mempertimbangkan kuadrat jarak. Tentu saja, model penciuman seperti itu adalah penyederhanaan yang kuat, tetapi dalam kerangka simulasi itu cukup dapat diterima.Dalam contoh-contoh, sinyal dari dua reseptor pertama kali melalui rantai neuron di mana terjadi saling penekanan, dan kemudian memberikan efek modulasi pada neuron motorik, mengendalikan pergerakan kecebong.
Tentu saja, model penciuman seperti itu adalah penyederhanaan yang kuat, tetapi dalam kerangka simulasi itu cukup dapat diterima.Dalam contoh-contoh, sinyal dari dua reseptor pertama kali melalui rantai neuron di mana terjadi saling penekanan, dan kemudian memberikan efek modulasi pada neuron motorik, mengendalikan pergerakan kecebong.Kebutuhan
Saya ingin perilaku kecebong menjadi sedikit lebih kompleks daripada hanya mengikuti makanan, jadi diputuskan untuk mensimulasikan mekanisme kebutuhan. Pertama, ini adalah kebutuhan akan makanan, kelaparan adalah keinginan alami untuk mengkonsumsi sumber energi yang diperlukan untuk pergerakan dan perkembangan tubuh. Dan secara alami, rasa lapar seharusnya memiliki derajat yang berbeda, jika hewan itu kenyang, maka makanan tidak akan terlalu menarik baginya. Kedua, kebutuhan yang tidak kalah mendasar untuk konservasi energi, yang secara evolusioner lahir sangat awal dan merupakan kunci penting dalam perilaku semua hewan. Menjadi malas terjalin ke esensi kita, ini memungkinkan kita untuk mengoptimalkan perilaku kita dalam hal konsumsi energi, orang yang mencapai hasil dengan lebih sedikit pemborosan sumber daya energi lebih sukses.
Untuk mewujudkan dua kebutuhan ini, dua reseptor khusus telah diperkenalkan, semakin tinggi kebutuhan, semakin sering mereka diaktifkan. Tingkat saturasi menurun seiring waktu, tingkat penurunan ini dapat disesuaikan pengguna, dan rasa lelah bertambah tergantung pada intensitas kontraksi otot.

Dalam contoh konservasi, seseorang dapat mengamati beberapa persaingan antara dua kebutuhan ini: kelelahan tidak dapat ditekan oleh kelaparan parah, tetapi kelaparan parah lebih kuat daripada kelelahan parah.
Sekarang perilaku kecebong menjadi lebih hidup, itu tergantung pada motif dan keinginan internal:
Kesimpulan
Berudu berenang dan makan, dan banyak lagi: ia merespons cahaya, menyentuh, jika Anda memegangnya, mencoba untuk keluar (seperti yang disediakan dalam simulator), mencari dan menemukan makanan, menderita kelaparan dan kelelahan, dan semua ini di bawah kendali neuron virtual .
Kecebong paling kompleks memiliki 63 neuron dan 131 koneksi sinaptik, saya ingat bahwa Caenorhabditis elegans memiliki 302 neuron, dan kecebong biologis membutuhkan 1.500 neuron untuk berenang normal saja. Semakin berkembang hewan, semakin tinggi redundansi neuron dalam menyelesaikan masalah, yang disebabkan oleh proses evolusi dan kebutuhan akan keandalan sistem. Masih sulit untuk menilai redundansi neuron dalam kaitannya dengan otak manusia, tetapi, menurut pendapat saya, untuk mengimplementasikan model komputer yang dekat dengan otak manusia, komputer kuantum atau mainframe, komputer rumahan yang cukup kuat, tidak akan diperlukan. Ini adalah pernyataan yang sangat berani, pertama, bertentangan dengan pendapat banyak pakar dalam topik ini, dan kedua, menghilangkan areola kompleksitas super dari tugas ini, yang tanpanya sulit untuk menghilangkan investasi luar biasa dari investor. Hal utama sekarang bukanlah kekuatan komputasi, tetapi pengembangan teknologi dan pendekatan yang tepat.
Rencana masa depan
OPENTadpole adalah tahap kecil, dalam perjalanan panjang untuk mengembangkan alat untuk memodelkan sistem saraf yang kompleks, yang, menurut pendapat saya, telah berhasil diselesaikan.
Tugas selanjutnya: membuat model yang dapat membedakan antara perintah suara sederhana, seperti yang dilakukan hewan peliharaan, untuk juga mempelajarinya dan, jika perlu, melatih kembali, dengan pemahaman tentang konteks tim. Saat saya bekerja, saya akan mencoba berbagi temuan saya dengan pembaca GT.
OPENTadpole dowland untuk WindowsKode sumber