 Salah satu pilihan untuk otot buatan dapat dilihat di bagian atas foto (dua tabung). Mereka mengangkat ban mobil seberat 22 kg. Foto: Institut Teknologi Massachusetts
Salah satu pilihan untuk otot buatan dapat dilihat di bagian atas foto (dua tabung). Mereka mengangkat ban mobil seberat 22 kg. Foto: Institut Teknologi Massachusetts"Otot" buatan mengklaim drive yang aman dan kuat untuk banyak perangkat berbeda: dari mesin konvensional hingga elektronik dan robot yang dapat ditanam. Tetapi seringkali desain dan produksi "otot" seperti itu terlalu rumit dan mahal, yang membatasi penggunaannya. Sekelompok ilmuwan dari Institut Teknologi Massachusetts dan Universitas Harvard telah mengembangkan
desain drive biokompatibel yang
sangat sederhana dengan biaya
kurang dari satu dolar , sementara cukup kuat untuk perangkat primitif semacam itu.
Drive dapat dibuat dari bahan yang berbeda dan ukuran yang berbeda menggunakan desain yang diterbitkan dalam gaya origami. Mereka bekerja di udara, di bawah air, di ruang hampa udara.
Konsep dasar perangkat baru hanya mencakup kerangka yang dapat dikompresi, kulit luar ("kulit") dan pengisi, yang dapat berupa bahan fluida apa pun, seperti udara atau air.
Eksperimen menunjukkan bahwa drive tersebut dapat memampatkan hingga 10% dari panjang maksimumnya, mereka dapat menahan beban hingga 600 kPa, dan daya spesifik maksimum melebihi 2 kilowatt per kilogram. Ini kira-kira sama dengan atau bahkan melebihi kekuatan spesifik dari otot-otot manusia.
 Desain, proses pembuatan, dan drive multiskala yang dihasilkan
Desain, proses pembuatan, dan drive multiskala yang dihasilkanKarya otot tiruan, serta proses murah produksi mereka ditunjukkan dalam ilustrasi di atas.
Legenda(A) Drive linear miniatur menggunakan struktur origami zigzag yang terbuat dari polyetheretherketone (PEEK) sebagai bingkai dan film PVC sebagai "kulit". Karena penggunaan bahan biokompatibel, drive tersebut cocok untuk digunakan dalam implan medis dan elektronik yang dapat dikenakan. (B) Drive besar dan kuat yang dipasang pada bingkai zig-zag yang terbuat dari pelat cetak nilon. "Kulit" terbuat dari nilon yang dilapisi dengan poliuretan termoplastik. Roda mobil dengan berat 22 kg naik ke ketinggian 20 cm dalam 30 detik (
video ). (C) Prinsip pengoperasian drive. Kontraksi otot terjadi terutama karena kekuatan tegang dari "kulit". Gaya ini diciptakan oleh perbedaan tekanan antara media fluida internal dan eksternal. Menghapus cairan dari aktuator sementara meningkatkan tekanan internal. (D) Proses produksi. Drive standar dapat dengan cepat diproduksi dalam tiga langkah sederhana: membuat sasis menggunakan salah satu dari berbagai metode produksi; persiapan "kulit"; penyegelan lapisan kedap air yang ketat.
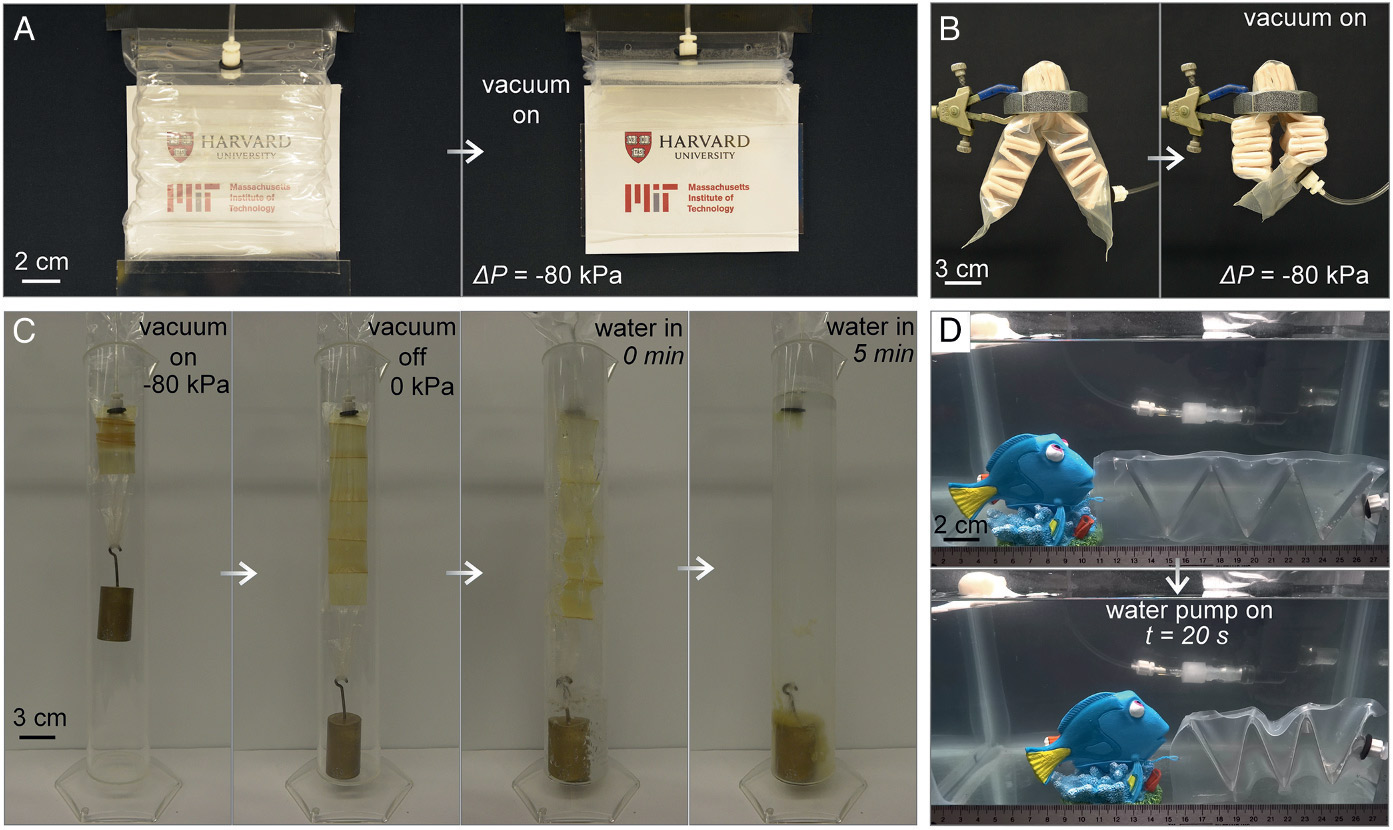 Drive zigzag linier dibuat dengan metode berbeda dari bahan berbeda
Drive zigzag linier dibuat dengan metode berbeda dari bahan berbedaBagian A menunjukkan drive transparan tipis yang mengangkat plat akrilik. Di sini, bingkai terbuat dari lembaran poliester transparan setebal 0,254 mm dengan pemotongan laser dan lipatan manual. Kulit: Film PVC transparan (vinil) setebal 0,102 mm. Bahan fluida: udara.
Pada Gambar B, drive linier lunak bekerja dengan baik bahkan ketika terkunci di mur logam. Bingkai dan kulit: karet silikon dan poliuretan termoplastik 0,24 mm. Bahan fluida: udara.
Pada Gambar C, penggerak yang larut dalam vakum larut dalam air panas pada suhu sekitar 70 ° C dalam lima menit. Baik rangka dan kulit terbuat dari polivinil asetat. Bahan fluida: udara.
Akhirnya, ilustrasi terakhir menunjukkan bahwa penggerak dengan air alih-alih udara sebagai bahan fluida pada kerangka baja berhasil bekerja di bawah air, khususnya, menggerakkan ikan 3,5 cm.
"Aktuator seperti otot buatan adalah salah satu tugas paling penting secara umum dalam rekayasa," kata Ph.D. Rob Wood, salah satu dari empat penulis karya ilmiah. "Sekarang kami telah membuat drive dengan karakteristik yang mirip dengan otot asli, sehingga Anda dapat membayangkan pembuatan hampir semua robot untuk hampir semua tugas."
Artikel ilmiah ini
diterbitkan pada tanggal 27 November 2017 di jurnal
Prosiding National Academy of Sciences (doi: 10.1073 / pnas.1713450114,
pdf ).