Dalam publikasi sebelumnya, saya memberikan ikhtisar tentang sejarah perancang teknik fischertechnik dari tahun 1965 hingga 2017, dan sekarang, sesuai dengan keinginan pembaca, saya memposting ikhtisar dari set 524328 ROBOTICS TXT Discovery set.

Konstruktor 524328 ditujukan untuk anak laki-laki dan perempuan yang tertarik pada mekanika, otomatisasi, pemrograman, visi komputer, atau, seperti yang mereka katakan sekarang, dalam robotika.
Kotak kardus berisi komponen mekanis, motor, pengontrol TXT yang dapat diprogram, kamera video, perangkat lunak ROBO Pro, instruksi perakitan, dan sebuah buku kecil dalam format PDF dengan materi pendidikan.
Selain itu, untuk bekerja dengan perancang, kami membutuhkan paket baterai 34969, yang mencakup baterai dan pengisi daya NiMH.
Namun, sebelum saya melanjutkan ke deskripsi rinci tentang kit, saya sarankan Anda membiasakan diri dengan sejarah perancang fischertechnik pertama yang didedikasikan untuk robotika.
Latar belakang
Desainer berbasis fischertechnik pertama yang didedikasikan untuk mobile robotics muncul pada tahun 1983 sebagai bagian dari proyek pendidikan eksperimental yang dilakukan pada waktu itu di Inggris.
Perusahaan Economatics, yang mengerjakan proyek tersebut, menarik perhatian pada karya seorang ilmuwan muda dari MIT Seymour Peypert (1928-2016), yang, meramalkan besarnya revolusi yang akan datang di bidang teknologi komputer, menyarankan untuk mulai memperkenalkan anak-anak ke komputer dari usia dini menggunakan pelatihan yang dikembangkan oleh timnya. Logo bahasa pemrograman.
Fitur penting dari Logo adalah antarmuka yang ramah dari lingkungan runtime dan kehadiran di lingkungan ini dari objek kontrol virtual - "turtle" grafis, yang, sesuai dengan perintah dari program yang dikompilasi, dapat bergerak di sekitar layar komputer, meninggalkan jejak. Omong-omong, karya Mr. Peypert ini telah berubah berkali-kali dan bertahan hingga hari ini dalam bentuk lingkungan pemrograman pembelajaran yang disebut Scratch (kita akan membicarakannya nanti).
Jadi, dalam solusi yang diusulkan sebagai hasilnya, ia diusulkan untuk mengganti kura-kura virtual dengan objek yang sangat nyata - keranjang seluler. Dengan demikian, siswa memiliki kesempatan tidak hanya untuk berkenalan dengan teknologi pemrograman, tetapi juga untuk mempelajari dasar-dasar robotika. Jadi set BBC Buggy pertama kali muncul:
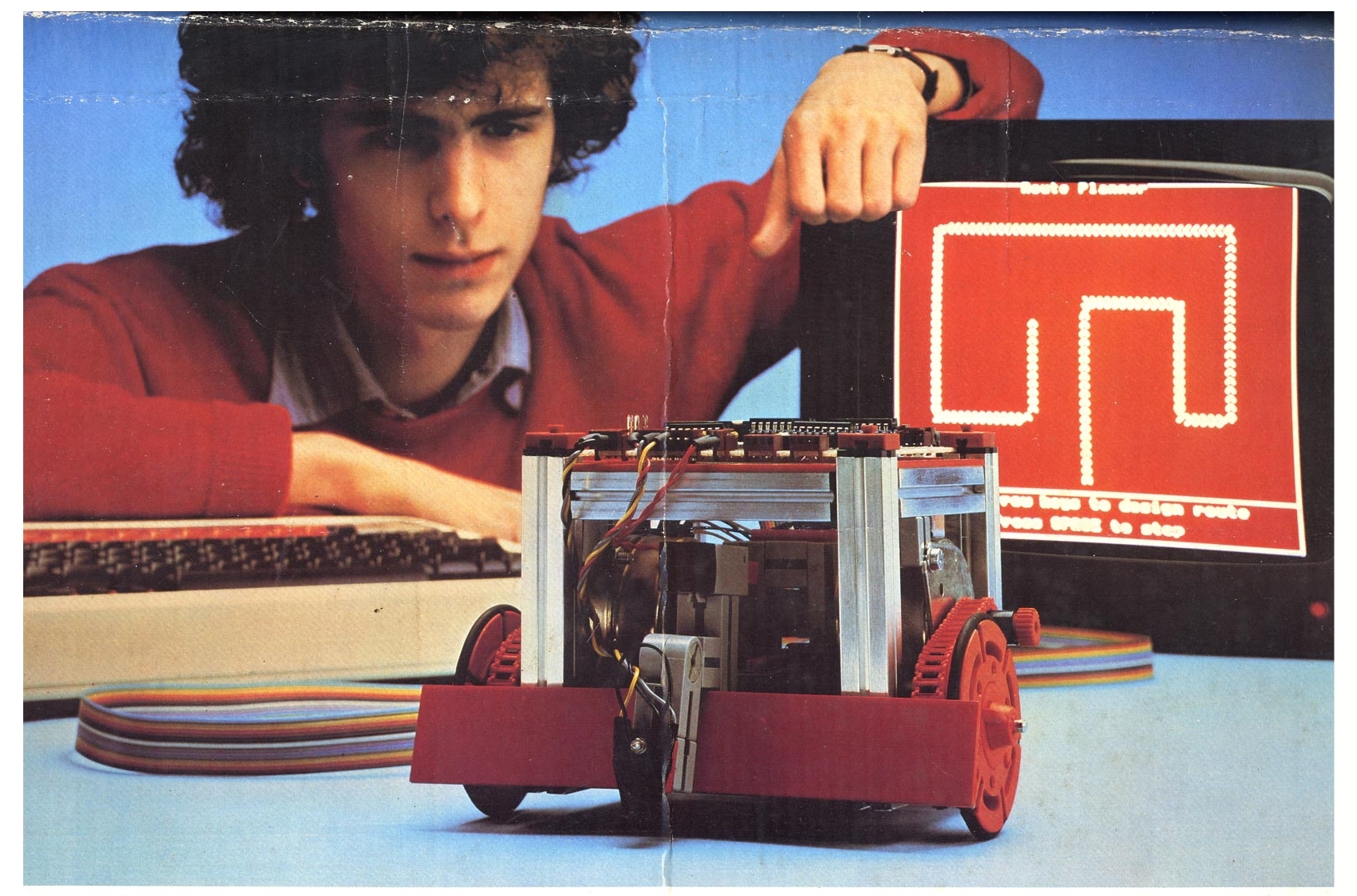
Kit ini termasuk bagian fischertechnik untuk merakit kereta, papan kontrol, pembawa dengan contoh program kontrol, dan instruksi dengan tugas pelatihan. Papan kontrol terhubung ke komputer menggunakan kabel datar. Kita dapat mengatakan bahwa itu adalah proyek gabungan fischertechnik + Ekonomi.
Fischertechnik meluncurkan kit eksperimen robot sepenuhnya milik pertama pada tahun 1987 - 39502 Komputasi-Eksperimental. Dari set itu dimungkinkan untuk membangun beberapa varian mesin otomatis dan mencoba tangan Anda pada algoritma kontrol pemrograman
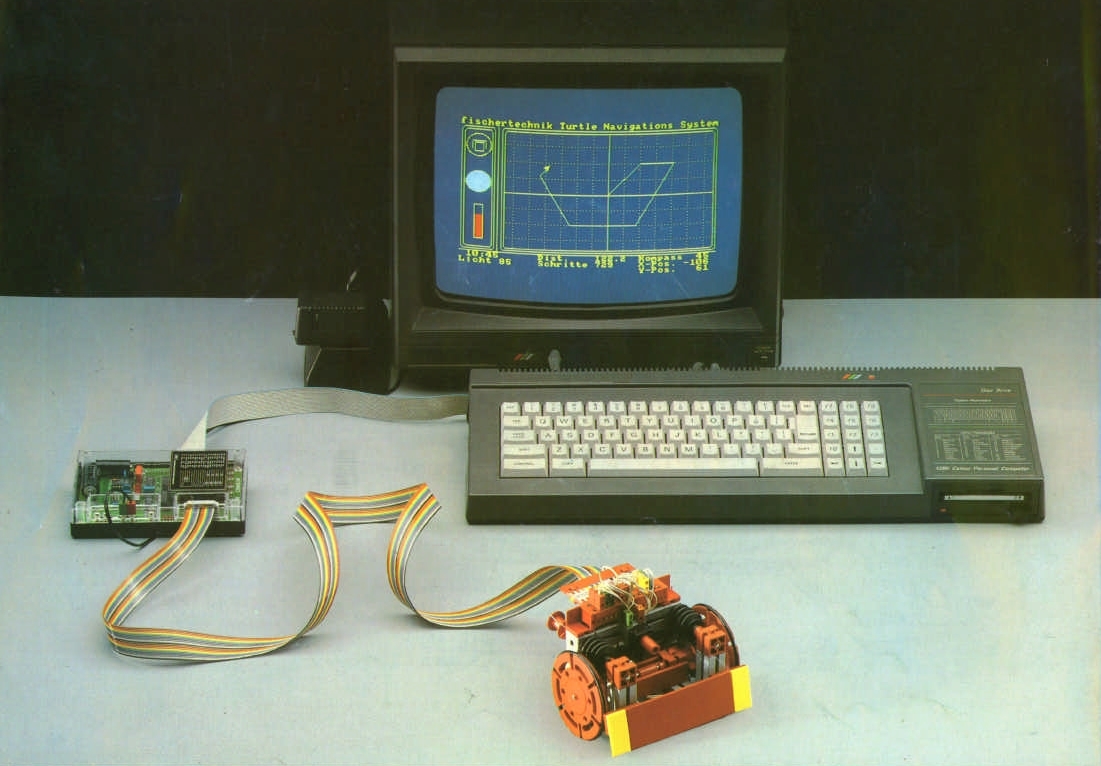
Ini diikuti oleh generasi desainer berikutnya dan set tambahan untuk ekspansi fungsional, tetapi ini adalah cerita yang membutuhkan artikel terpisah. Hari ini saya sarankan untuk melihat lebih dekat pada set saat ini - 524328 ROBOTICS TXT Discovery set
524328 ROBOTICS TXT Discovery set
Desainer 524328 terdiri dari 310 bagian, yang darinya 14 model untuk eksperimen dapat dibangun. Selain instruksi perakitan dan CD dengan perangkat lunak ROBO Pro, kotak ini juga berisi blanko untuk merakit tempat pengujian untuk pengujian robot seluler. Secara tradisional, set disertai dengan buku mini dalam format PDF, dari mana Anda bisa mendapatkan informasi dasar dari bidang robotika.
Penampilan kemasan:

Di dalam kotak kardus, bagian-bagian disimpan dalam dua pondok plastik di kompartemen terpisah. Jika diinginkan, Anda juga dapat membeli sistem penyimpanan berpemilik dan menggunakan media untuk mengurutkan bagian-bagian yang mudah dipotong dengan gunting dari instruksi perakitan.
Untuk digunakan di mug dan sekolah, perancang ini dikemas dalam wadah plastik Gratnells yang lebih nyaman dan tahan lama dan memiliki nomor pesanan lain - 533018.

Selain elemen struktural yang sederhana, daftar bagian termasuk dua servomotor dengan encoders bawaan, satu motor DC konvensional dengan gearbox eksternal, fototransistor, termistor, bus, LED, dan bola oranye untuk percobaan dengan sistem visi komputer:

(dengan mengklik pada gambar - sewz)
Pengontrol TXT yang dapat diprogram
Unit kontrol pada perancang 524328 dibuat dalam bentuk komputer kompak yang dibangun berdasarkan prosesor ARM Cortex A8 dan papan input-output terintegrasi pada ARM Cortex M3. Untuk berinteraksi dengan pengguna, unit ini memiliki layar sentuh warna 2,4 inci, 320x240 dengan cahaya latar. Selain itu, komputer ini memiliki speaker dan RTC built-in dengan daya cadangan dari baterai lithium.
Pengontrol TXT:

Pengontrol TXT berjalan di bawah OS Linux kernel. Jika diinginkan, Anda dapat mem-boot OS Anda dari kartu memori micro-SD plug-in.
Memori
- RAM 128 MB DDR3
- 64 MB FLASH
- Sd mikro
- Perangkat penyimpanan massal USB
Komunikasi
Antarmuka pengontrol memiliki antarmuka berikut:
- Bluetooth 2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- Konektor mini USB untuk menghubungkan ke komputer
- Konektor USB-A dengan fungsi pengontrol host untuk menghubungkan kamera USB, USB flash drive dan perangkat lainnya.
- Fotodetektor IR untuk kendali jarak jauh dari kit “Kit kendali jarak jauh”
- Antarmuka I2C
- Antarmuka UART
- BISA antarmuka
Input-output
- Input universal: 8 buah digital / analog 0-9V atau 0-5 kOhm
- Menghitung input: 4 buah (Fin 0-9V <1 kHz)
- Output universal (PWM 9V / 0.25A): 8 buah
Untuk berjaga-jaga, interior pengontrol TXT dapat dilihat pada gambar di bawah ini:
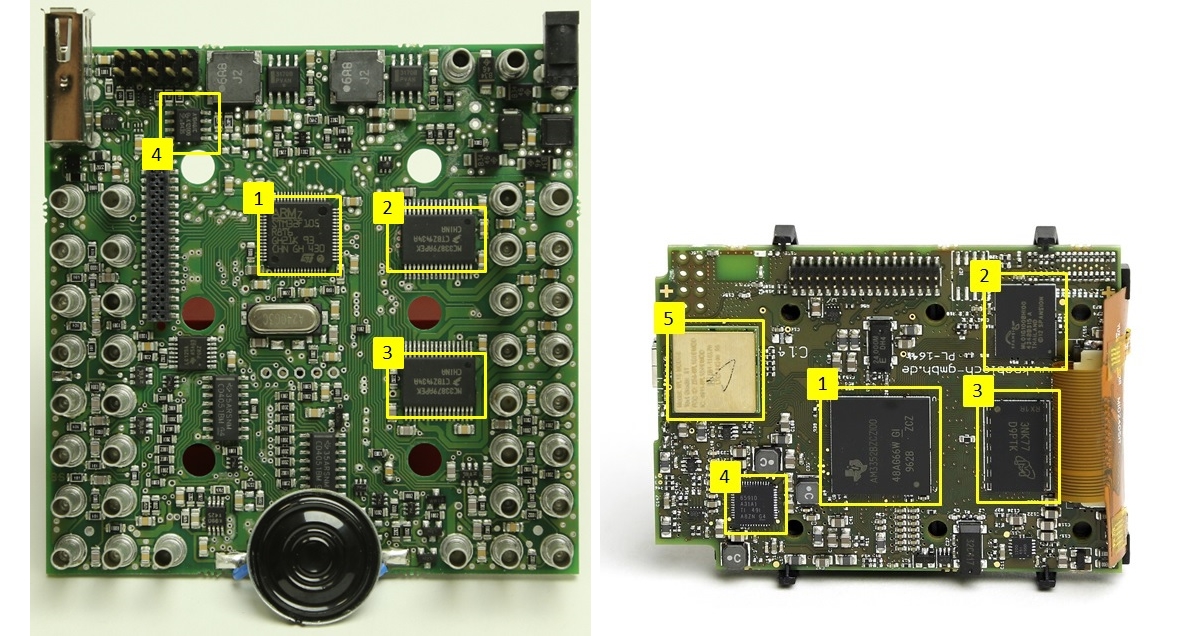
Di papan sirkuit kiri:
- ST STM32F105R8T6 - ARM mikrokontroler ARM.
- MC33879 - driver output.
- MC33879 - driver output.
- TJA1040 - BISA driver serial bus.
Di papan sirkuit kanan:
- TI AM3352B - Mikrokontroler ARM Cortex-A8.
- Spansion ML01G100 - SLC NAND FLASH 64MB.
- Samsung K4B2G - DDR3L 1600 DRAM 128 MB
- TPS65910 - modul manajemen daya.
- WL18MODGB (5) menggabungkan modul WiFi + Bluetooth.
Fitur penting dari kit ini adalah ketersediaan perangkat keras dan perangkat lunak untuk percobaan dengan visi komputer. Untuk melakukan ini, kit memiliki kamera video dengan antarmuka USB, dan perangkat lunak alat ROBO Pro memiliki perpustakaan fungsi penglihatan komputer dan konfigurator untuk pengaturan dan commissioning.

Pustaka visi komputer berisi fungsi dasar berikut untuk memproses bingkai video:
- Perhitungan kecerahan rata-rata suatu wilayah tertentu dari bingkai video.
- Cari urutan elemen raster dengan warna yang sama untuk wilayah tertentu dari bingkai video.
- Cari sosok geometris, perhitungan koordinat dan ukuran.
- Detektor gerak di wilayah bingkai video.
Configurator subsistem visi komputer termasuk dalam perangkat lunak ROBO Pro:

ROBO Pro Tooling Software
Untuk mengembangkan program kontrol untuk pengendali TXT, diusulkan untuk menggunakan perangkat lunak alat pendidikan ROBO Pro, yang mencakup editor diagram blok algoritma, perpustakaan elemen program dasar, perpustakaan fungsi aplikasi, alat bantu komisioning dan kendali jarak jauh. Perangkat lunak ROBO Pro adalah bagian dari kit desain. Secara terpisah, tidak perlu membelinya.
Biasanya, jendela editor terlihat seperti gambar di bawah ini:
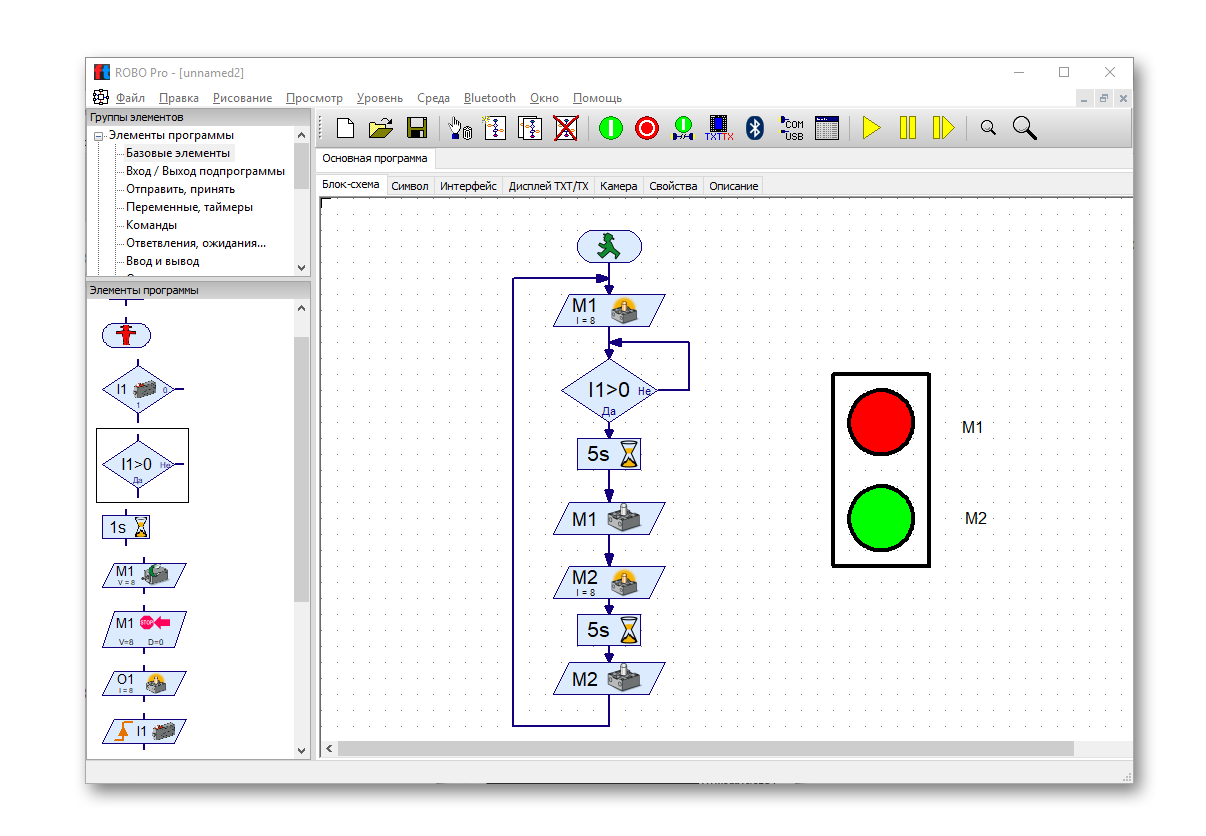
Algoritma kontrol dikompilasi dalam bentuk diagram alur klasik konvensional - seperti kebiasaan dalam literatur IT khusus dan dokumentasi teknis. Anda, tentu saja, bisa bertanya kepada saya: - bagaimana dengan Scratch? Mengapa ada dalam dokumentasi untuk algoritma ATMAT atau PLC SIMATIC MK yang digambarkan dalam bentuk diagram alur, dan bukan dalam bentuk sirkuit awal? Di sini, saya hampir tidak bisa menjawab Anda secara wajar. Namun, insinyur internal saya senang dengan kesempatan untuk menggunakan alat visual yang diterima secara umum dengan cara alami untuk kenalan pertama anak-anak dengan teknologi kontrol otomatis.
Untuk jaga-jaga, algoritma dari dokumentasi teknis :

Flowchart yang dikompilasi dalam editor dapat dieksekusi dalam dua mode - secara lokal pada mesin instrumental atau secara jarak jauh dengan mengunduh ke mesin target. Metode pertama nyaman untuk debugging. selama eksekusi algoritma, Anda dapat menggunakan eksekusi langkah-demi-langkah dan menyorot langkah algoritma saat ini.
Untuk pengguna tingkat lanjut, ROBO Pro memiliki dukungan algoritma multi-threaded. Dekomposisi algoritma menjadi prosedur juga didukung, dan ada juga elemen antarmuka pengguna yang dapat ditempatkan langsung pada lembar diagram alur.
Pustaka elemen antarmuka pengguna memiliki perekam / osiloskop, pengukur panggil, dan bidang untuk input dan output nilai digital. Ini adalah fitur yang sangat penting bagi pengguna pemula dan lanjutan. Kemampuan untuk merekam data secara real time dan analisis selanjutnya sangat menyederhanakan studi tentang algoritma kontrol baru dan secara signifikan mengurangi waktu setup.
Seperti inilah tampilan jendela editor dengan proyek yang lebih kompleks:
Set tambahan
Fungsi kit 524328 dapat diperluas dengan kit tambahan dari seri ROBOTICS:
Mereka berbeda dari konstruktor 524328 dengan tidak adanya pengontrol TXT. Diasumsikan bahwa transisi ke set ini terjadi setelah menyelesaikan semua masalah dari set 524328.
Contoh Proyek
Saya menyiapkan beberapa video yang mengungkapkan beberapa (tetapi tidak berarti semua) kemungkinan konstruktor standar TXT Discovery tanpa detail tambahan. Semua proyek dari contoh ada di github . Saya akan dengan senang hati menjawab pertanyaan Anda di komentar.
Dua algoritma lampu lalu lintas sederhana:
Remote control menggunakan elemen antarmuka pengguna dan penyiaran video di ROBO Pro:
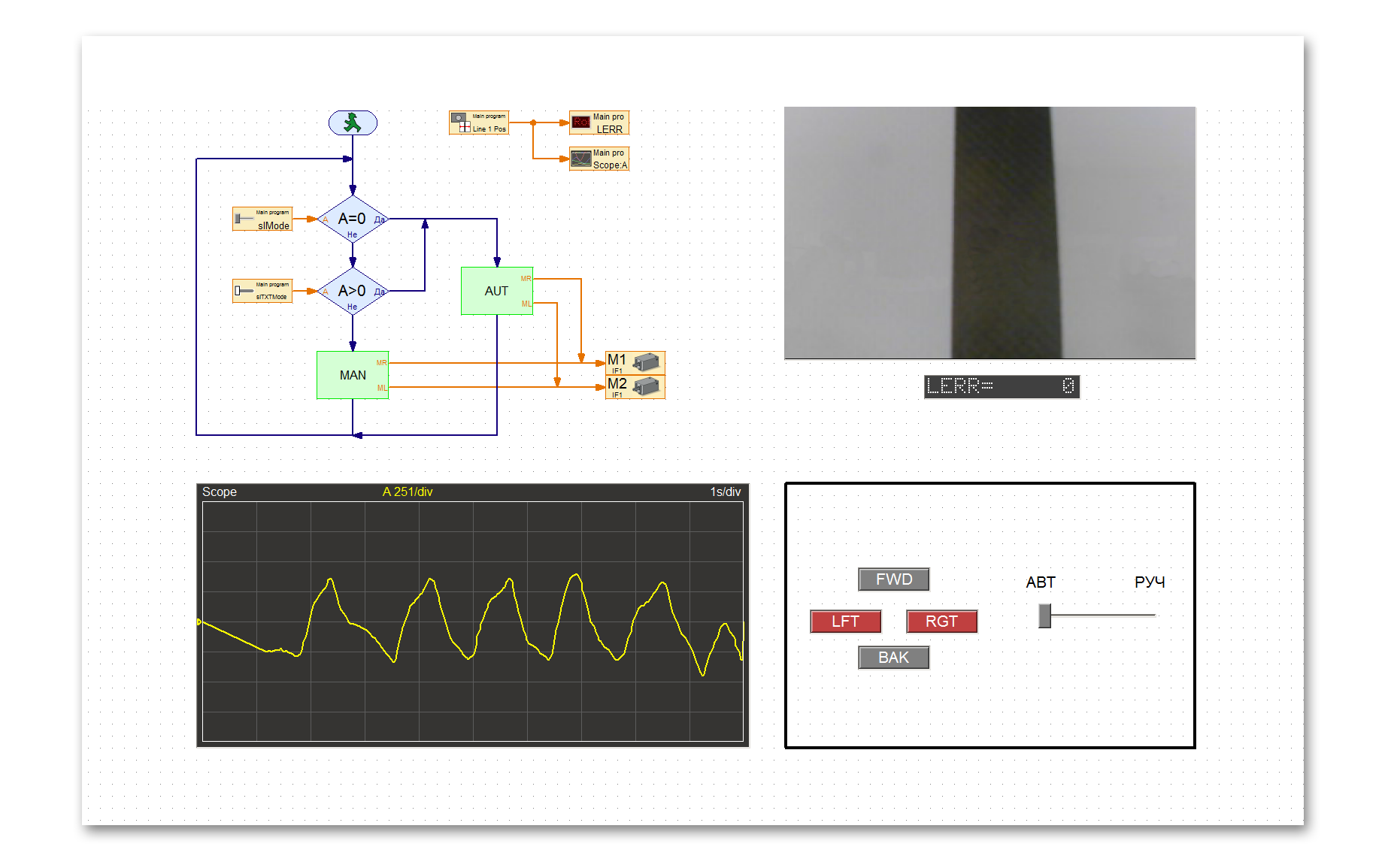
Kontrol otomatis gerobak dengan umpan balik berdasarkan visi komputer. Hukum proporsional peraturan digunakan. Keuntungan dari tautan proporsional KP = 3.5. Dapat dilihat bahwa troli bergerak dengan limbung di sepanjang rute - ia bergoyang dan akhirnya meninggalkan lintasan. Perhatikan logger parameter. Ini memungkinkan Anda untuk menghitung nilai overshoot setelah gerakan dihentikan:
Alasan untuk perilaku tidak stabil adalah bahwa ketika troli berputar, kekuatan inersia muncul yang akan terus mengubah troli bahkan jika tindakan kontrol dari link proporsional adalah nol. Sebagai hasilnya, kita melihat bagaimana troli melewati garis dan kemudian mulai berbelok ke arah yang berlawanan - osilasi terjadi dalam sistem dinamis. Perilaku ini sangat mengurangi kualitas kontrol dan dalam beberapa kasus dapat menyebabkan kegagalan.
Untuk melawan gaya inersia, elemen pembeda ditambahkan ke struktur pengontrol, yang membentuk sinyal sebanding dengan perubahan ketidaksesuaian pada input pengontrol. Tetapkan koefisien KD = 6.0 dan lihat bagaimana trolley berperilaku:
Sekarang robot terus melewati trek. Perhatikan sinyal hijau pada perekam - ini adalah sinyal keluaran dari tautan diferensial regulator, yang membantu "memperlambat" putaran robot ketika kembali ke lintasan.
Kesimpulan
Di atas, saya memberikan beberapa contoh penggunaan 524328 ROBOTICS TXT Discovery yang diatur untuk mengatur latihan praktis tentang teori kontrol otomatis. Contoh-contoh yang diberikan sangat kering dan tanpa perhitungan teoritis. Saya berpikir bahwa dalam salah satu publikasi berikut ini saya akan dapat membagikan praktik terbaik saya mengenai organisasi kelas praktis dalam otomatisasi menggunakan konstruktor fischertechnik. Apakah Anda tertarik dengan ini?
Seperti biasa, bagi pecinta teknik yang telah menguasai seluruh pos, diskon 15% pada kode gktms1712 hingga 12/31/2017 secara khusus di toko Pakpak . Kemuliaan bagi robot!
Referensi
- Kisah Penyu Pelatihan Buggy BBC 1983
- Seymour Papert - penemu bahasa Logo
- Pembuatan OS Kustom untuk Pengontrol TXT
- Gores untuk pengontrol TXT
- Python untuk pengontrol TXT