Dibuat pada tahun 60-an, Shakey adalah robot mobile pertama dengan kemampuan untuk menganalisis aksinya. Tujuan ambisius proyek tidak sepenuhnya tercapai, tetapi memiliki pengaruh besar pada pengembangan robotika lebih lanjut.
Para penulis proyek Shakey menggambarkan bagaimana kontrol robot diatur dalam sebuah artikel besar oleh Majalah AI. Dalam posting ini - terjemahan fragmen teks yang paling menarik dan penting. Penulisnya, Peter Hart, adalah anggota tim pengembangan. Menciptakan Shakey
Proyek Shakey diluncurkan pada Januari 1965 atas prakarsa Centre for Artificial Intelligence di Stanford Research Institute (SRI International). Institut mengusulkan pengembangan "mesin pintar" untuk aplikasi intelijen. Tetapi kelompok kerja memiliki motivasi yang berbeda. Mereka ingin membuat situs uji untuk menghubungkan semua bidang kecerdasan buatan (representasi sistemik, penalaran, perencanaan, pembelajaran mesin, visi komputer dan pemahaman ucapan alami).
Saat mengembangkan Shakey, para insinyur dipandu oleh dua aturan:
- mekanika perlu dijaga sesederhana mungkin - oleh karena itu, tidak ada lengan manipulator tunggal yang dipasang pada robot;
- Agar nantinya tidak bekerja mengurangi desain, rak elektronik dipasang di atas.
Karena kemampuan mekanik dan sensorik Shakey terbatas, tim proyek menciptakan lingkungan eksperimental yang kuat dan sederhana untuk robot - setengah lusin kamar dengan blok geometris besar di dalamnya. Blok-blok itu dicat agar dikenali oleh kamera beresolusi rendah.
Komputer pertama untuk Shakey adalah SDS 940 dengan memori kurang dari L2 cache laptop modern. Pada tahun 1970, ia digantikan oleh DEC PDP-10 yang lebih kuat. Shakey berbicara kepada PDP-10 melalui prosesor komunikasi. Sistem ini adalah salah satu simpul yang berkontribusi pada kelahiran ARPANET. Sekitar waktu yang sama, penulisan ulang lengkap perangkat lunak Shakey dimulai. Besi hanya membutuhkan sedikit peningkatan.
Elemen Desain Goyah KunciPerangkat Lunak Goyang
Versi kedua produk ini didasarkan pada dua ide mendasar. Yang pertama adalah untuk mewakili dunia Shakey melalui kalkulus
predikat orde pertama , melengkapi formulir dengan model grid - komponen kunci dari versi pertama.
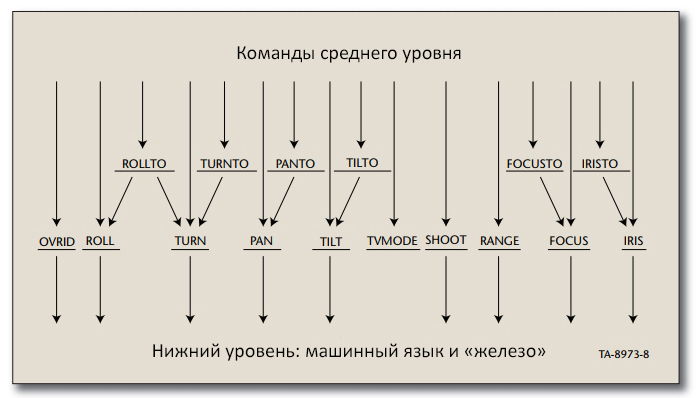
Gagasan kedua adalah menyusun perangkat lunak Shakey menjadi beberapa lapisan. Pendekatan untuk mengendalikan robot ini digunakan untuk pertama kalinya. Selanjutnya, kami jelaskan secara singkat setiap tingkat, dimulai dengan perintah tingkat yang lebih rendah.
Tim tingkat bawahPerintah tingkat bawah, seperti ROLL dan PAN, dikirim langsung ke komponen perangkat keras Shakey. Pada tingkat ini juga terletak tim seperti PANTO, yang bertanggung jawab untuk memutar "kepala" perangkat ke arah yang dipilih.
 Tim tingkat menengah: Rantai Markov
Tim tingkat menengah: Rantai MarkovPada level ini ada tim seperti GOTHRUDOOR ("walk through the door"). Mereka dialokasikan ke tingkat yang terpisah, karena mereka semua diwakili sebagai
rantai Markov .
Rantai Markov untuk tim GOTHRUDOORRantai Markov dapat "dibaca" dengan terlebih dahulu memindai kolom kiri sampai kondisi sebenarnya pertama tercapai yang melakukan tindakan yang sesuai, dan kemudian kembali ke awal tabel. Karenanya, rantai Markov dicirikan oleh stabilitas (algoritme tindakan ini sedikit disederhanakan, tetapi praktik "kembali ke awal" sangat mendasar dan, seperti akan kita lihat, fitur penting dari rantai ini).
Jika tim tingkat menengah adalah yang terakhir yang bisa dieksekusi Shakey, robot akan sangat terbatas dalam aksinya. Dia hanya bisa mencapai tujuan yang hanya membutuhkan satu tindakan yang sudah diprogram. Untuk berbuat lebih banyak, Shakey harus mampu menyusun serangkaian tindakan (sebagai rencana). STRIPS scheduler otomatis (Stanford Research Institute Problem Solver) bertanggung jawab untuk ini. Dia adalah perangkat lunak berikutnya, tingkat yang lebih tinggi.
STRIPS, Pemecah Masalah Stanford Research InstituteSTRIPS scheduler otomatis telah muncul karena kombinasi dari dua konsep besar. Yang pertama adalah strategi perencanaan yang disebut analisis tujuan dan sarana. Itu disajikan dalam sistem "General Problem Solver" oleh Herbert Simon dan Allen Newell.
Konsep kedua adalah bukti teorema dalam kalkulus predikat dan penerapannya dalam sistem tanya jawab. Ini dibahas dalam karya Cordell Green. Richard Fykes dan Niels Nielson menggabungkan pengetahuan ini untuk membuat STRIPS pada tahun 1971, yang menggunakan analisis tujuan dan sarana untuk menghitung predikat.
PLANEX, Eksekutif Pelaksana RencanaTak lama setelah membuat STRIPS, tim institut menemukan cara untuk menggeneralisasi rencana STRIPS dengan mengganti konstanta dalam sistem dengan variabel. Mereka juga menemukan struktur data yang disebut tabel segitiga, yang menunjukkan saling ketergantungan internal dari rencana generik. Desain ini membentuk dasar dari sistem PLANEX, level terbaru dari perangkat lunak Shakey (Fykes, Hart, dan Nielson, 1972).
Dengan menggunakan perangkat lunak ini, PLANEX dapat memantau implementasi rencana yang sebenarnya. Sistem mungkin memperhatikan jika ada masalah dan menjadwal ulang pekerjaan dari saat itu, menggunakan kembali bagian dari rencana yang ada jika memungkinkan. Itu bahkan bisa menjadi keputusan “kewirausahaan”: jika Shakey tiba-tiba lebih dekat untuk menyelesaikan tugasnya, ia dapat mengubahnya untuk keuntungannya.
Kemampuan untuk mendeteksi dan memulihkan kesalahan ini adalah bagian penting dari perangkat lunak Shakey. Ada perbedaan besar antara membuat rencana aksi untuk robot nyata yang berfungsi di dunia nyata, di mana ada sesuatu yang salah, dan penjadwal "abstrak" yang hanya mencetak rencana simbolis. Rantai PLANEX dan Markov menjadi solusi untuk mencapai perencanaan dunia nyata yang andal.
Hierarki Tingkat Perangkat Lunak ShakeyVisi komputer
Rencana proyek awal tidak memerlukan penelitian intensif di bidang visi komputer. Sebaliknya, rencananya adalah untuk mengintegrasikan teknik visi komputer yang ada ke dalam platform eksperimental. Tetapi, ternyata, pada waktu itu sangat sedikit teknologi yang tersedia, sehingga para spesialis harus bekerja keras dalam bidang penelitian visi komputer.
Salah satu hasil penting dari karya ini adalah penemuan apa yang bisa disebut bentuk modern dari transformasi Hough, metode yang digunakan untuk mengekstraksi elemen dari gambar (R. Duda, P. Hart, 1972). Ini dicapai dengan menggabungkan dua konsep yang pada pandangan pertama tampaknya sama sekali tidak berhubungan.
Gagasan pertama terkandung dalam paten Paul Hough. Ini menggambarkan transformasi dari titik-titik di bidang gambar ke garis lurus di ruang transformasi. Garis berpotongan di yang terakhir sesuai dengan titik-titik collinear dalam bentuk. Tetapi masalah kemiringan tak berujung muncul, yang membuat transformasi ini rumit secara komputasi.
Gagasan kedua datang dari apa yang disebut geometri integral. Matematikawan memiliki alasan teoretis untuk menggunakan parameterisasi jari-jari sudut garis daripada mencegat kemiringan yang lebih akrab digunakan oleh Hough. Peter Hart mencatat bahwa ketika mengganti transformasi Hough linier dengan yang sinusoidal, tidak hanya masalah kemiringan tak terbatas yang dipecahkan, tetapi transformasi baru juga berbeda dengan pilihan koordinat. Selain itu, Peter Hart dan Richard Duda telah memperluas metode ini untuk mendeteksi kurva analitik dalam gambar, dan transformasi ini telah digunakan sejak saat itu.
Navigasi dan algoritma A *
Shakey harus fokus pada medan, jadi beberapa algoritma jalur terpendek dikembangkan. Salah satunya, disebut A *, diciptakan oleh Peter Hart, Niels Nielson dan Bertram Raphael. Algoritma baru memiliki sifat yang sangat berguna: pertama, selalu menemukan jalur terpendek, dan kedua, sementara itu memilih jumlah minimum kemungkinan alternatif. Kita dapat mengatakan bahwa itu selalu berfungsi dan efisien secara komputasi.
Anda mungkin berpikir bahwa hasil yang signifikan akan menyambut publikasi apa pun dengan senang hati, tetapi ternyata sebaliknya. Penyajian algoritma A * ditolak oleh semua jurnal ilmiah bergengsi saat itu.
Melihat ulasan lama ini, Anda mungkin berpikir bahwa editor memberikan laporan kepada matematikawan untuk membaca karena semua teorema yang menakutkan ini. Namun, para ahli matematika tidak terkesan, karena hanya grafik dengan jumlah node yang terbatas yang disajikan dari bukti. Pada saat itu, tampaknya bagi penulis bahwa ahli matematika tidak melihat perbedaan antara grafik dengan sepuluh node dan grafik dengan sepuluh triliun node. Tetapi bagi para ilmuwan yang bekerja di bidang ilmu komputer, perbedaan ini signifikan.
Pada akhirnya, laporan tersebut diterima di Institute of Electrical and Electronics Engineers (Transaksi IEEE tentang Ilmu Sistem dan Sibernetika) dan terus dirujuk selama lebih dari 45 tahun.
Dunia pada saat itu
Di atas memberikan gambaran tentang bagian (meskipun jauh dari keseluruhan volume!) Dari pekerjaan yang dilakukan oleh tim proyek Shakey. Untuk memiliki gagasan tentang karya ini dalam konteks sosial yang lebih luas, mari kita lihat iklim intelektual dan budaya saat itu.
Pada tahun 1970, sebuah artikel besar tentang proyek Shakey diterbitkan di majalah Life populer. Penulis, jurnalis Brad Darrach, tampaknya telah melangkah terlalu jauh dengan tajuk utama: "Kenyataan yang menakjubkan dan mengerikan dari sebuah mesin dengan pikirannya sendiri." Namun, sementara beberapa percaya bahwa robot dapat memperbudak dunia, yang lain cukup skeptis dengan artikel tersebut. Hubert Dreyfus adalah salah satu dari mereka yang, dari sudut pandang filosofis, berpendapat bahwa konsep AI pada dasarnya tidak realistis. Dan di suatu tempat antara Darrach dan Dreyfus, ada orang-orang yang takut robot suatu hari nanti akan mengambil pekerjaan manusia.
Posting Majalah Kehidupan ShakeyTamu yang goyah
Pengembang robot menyambut setiap pengunjung yang tertarik dengan pekerjaan mereka. Tinjauan atas reaksi yang didapat juga mengatakan banyak tentang keadaan dunia saat itu. Berikut ini beberapa contohnya:
- Sekelompok anak sekolah mengunjungi laboratorium. Guru yang menemani mereka bertanya apa yang para insinyur miliki "pekerjaan nyata": "Robot ini adalah hobi Anda, bukan?"
- Jenderal bertanya apakah pisau 36 inci dapat dipasang pada robot.
- Arthur Clarke mengunjungi laboratorium segera setelah rilis film "Space Odyssey of 2001", tetapi lebih tertarik untuk berbicara tentang review New York Times dari film daripada dalam diskusi tentang masa depan robot.
- Seorang siswa sekolah menengah melaju dari Seattle ke Menlo Park di California untuk melihat Shakey. Beberapa dekade kemudian, Bill Gates ingat bahwa apa yang dilihatnya mengesankan.
- Seorang auditor dari pemerintah AS bertanya apakah SRI benar-benar memberikan miliaran "paket bit". Pertanyaan ini diikuti oleh orang lain, termasuk apakah korosi diperhatikan pada bit-bit ini.
Penyelesaian Proyek Shakey
Proyek Shakey ditutup pada tahun 1972 - bukan karena kurangnya ide, tetapi karena kurangnya dana. Apa yang telah dicapai selama keberadaannya?
Ada banyak pendapat tentang skor ini seperti halnya ada anggota tim, tetapi beberapa generalisasi dapat dibuat:
- Banyak hasil pribadi proyek (STRIPS, PLANEX, algoritma A *, dan bentuk baru transformasi Hough) telah menjadi kontribusi teknis yang signifikan.
- Secara keseluruhan, Shakey adalah pencapaian yang signifikan. Dia adalah robot cerdas seluler pertama dan sistem pertama yang menggabungkan perangkat lunak dengan AI dengan perangkat keras fisik.
- Kemampuan umum Shakey, dalam hal mekanika dan perangkat lunak, belum mencapai tingkat aspirasi awal. Ini tidak mengejutkan, mengingat tingkat klaim awalnya tinggi. Butuh beberapa dekade untuk mencapai beberapa tujuan yang dinyatakan, sementara yang lain masih belum terselesaikan.
Referensi:
1. "Shakey: From Conception to History." Artikel asli Bagian kedua dari materi berbicara tentang aplikasi lebih lanjut dari penemuan proyek Shakey. Pergi ke
2. "Berapa Banyak yang Dibutuhkan Untuk Mengulang Robot Shakey?" - Upaya mereproduksi Shakey dalam kondisi modern. Pergi keUntuk informasi lebih lanjut tentang robotika, kunjungi robo-hunter.com:Ilmu Pengetahuan Populer: