Halo, Komunitas! Artikel ini adalah "sepeda" klasik, tetapi bagi pemula dalam bidang elektronik dan robotika itu bisa menarik.
Seperti yang Anda ketahui, robotika terkecil dan paling sederhana sekarang dirakit pada mikrokontroler seperti Atmega atau STM. Di sini, di artikel saya pada dasarnya tidak mengambil tingkat komputer mini seperti Raspberry.
Dalam robotika, selain gerakan, kadang-kadang perlu untuk membuat setidaknya penilaian ruang di sekitarnya. Jadi - saya tidak menemukan sensor raster optik untuk MK sederhana. "Sensor garis" yang populer bukanlah itu. Pencarian pada Giktims dan sumber daya serupa memberikan tautan ke kamera, tetapi mereka terlalu cepat untuk MK sederhana dan satu artikel tentang menggunakan 8 pcs. LED sebagai fotodioda.
Oleh karena itu, ide itu lahir untuk membuat sensor raster primitif - protoglaze, dengan analogi dengan organisme hidup pertama. Segala sesuatu yang ditulis di bawah ini dilakukan hanya untuk hiburan saya sendiri, dengan biaya minimal dan aplikasi praktis tidak seharusnya. Biarkan sepeda lagi, tetapi sehubungan dengan
Nipkov dan ayah dari televisi mekanik.Detail di bawah ...
Satu fototransistor BPW85C tersedia. Adalah logis bahwa pemindai radar dengan cahaya fokus pada fotosensor dapat dibuat.
Opsi 1
Untuk pemfokusan, Anda dapat menggunakan cermin parabola putar, dan phototransistor stasioner untuk menempatkan dalam fokus. Saya tidak punya cermin, tapi ada lembaran timah yang rata. Setelah 3 jam bekerja dengan tangan saya, cermin 10 kopecks dan bentuk hampir parabola diperoleh.
Cermin parabola. Sulit untuk mengambil cermin))Setelah memasang instalasi putar, ditemukan bahwa cahaya entah bagaimana masuk tidak hanya dari cermin, tetapi juga dari semua sisi. Sensor tidak dapat ditutupi oleh layar, karena sebagian besar tampilan juga tertutup. Saya harus menolak.
Opsi 2
Untuk fokus, gunakan lensa pengumpul, kumpulkan analog kamera.
Tidak ada lensa dengan diameter yang dibutuhkan (12 mm) yang ditemukan; Saya harus menggunakan tangan saya untuk membuatnya dari compact disc (ada plastik dengan sifat optik yang baik).
Ya, ini adalah masa kecil yang keras, mainan kayu. Ternyata, pemfokusan dapat diterima, titik fokus bahkan lebih kecil dari kristal fototransistor.
Tampilan lensaInstalasi putar - pada motor miniatur 15mm. Gear reduksi sabuk dari seri yang sama - “out of nothing”. Sudut rotasi ke kiri dan kanan sekitar 45 °.
Tampilan umumMelalui driver A4988, Amtega328P MK mengontrol motor stepper. Mode setengah langkah digunakan, dan untuk setiap setengah langkah sinyal dibaca dari ADC MK. Sebelum ADC, ada juga penguat pada transistor, karena sinyal fototransistor lemah. Data yang diterima tanpa pemrosesan segera ditransmisikan melalui RS-232 ke komputer. Diagram iluminasi sudah dibangun di komputer.
Tampilan umumTotal: saat pemindaian horizontal. Resolusi 320 baris saat membaca, resolusi sebenarnya sulit diukur, pada tes dengan satu titik sumber cahaya ternyata 6/320, yaitu sekitar 53 baris per raster.
Tapi ini adalah model pertama, yang kedua (untuk 2D) akan ada di artikel berikutnya.Tes:
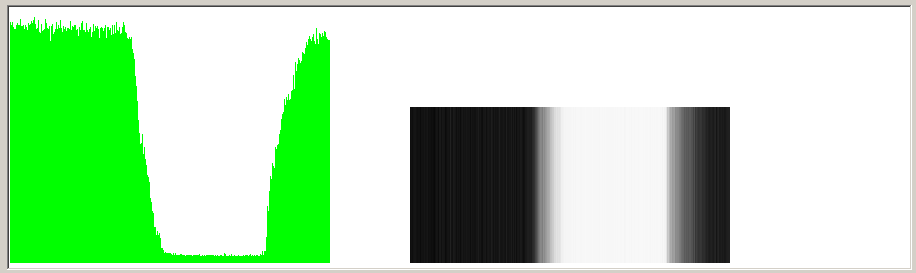 Tes untuk pencahayaan yang berbeda. Diagram hijau adalah level tegangan pada ADC, gambar hitam dan putih adalah hasil dari konversi sinyal yang MK “lihat”.
Tes untuk pencahayaan yang berbeda. Diagram hijau adalah level tegangan pada ADC, gambar hitam dan putih adalah hasil dari konversi sinyal yang MK “lihat”.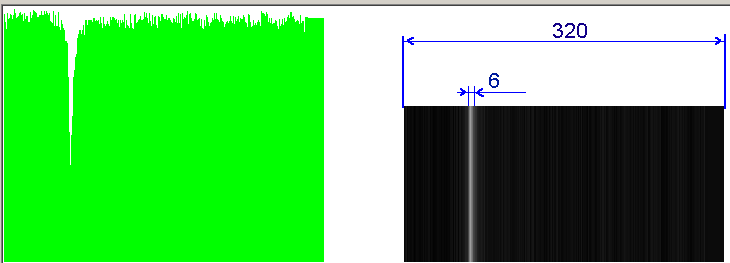 Tes titik tunggal. Resolusi aktual sekitar 53 baris
Tes titik tunggal. Resolusi aktual sekitar 53 baris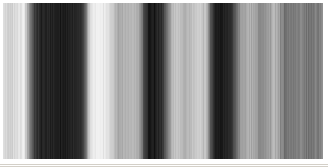
 "Memotret" baterai tiga jari dengan latar belakang yang terang
"Memotret" baterai tiga jari dengan latar belakang yang terangKecepatan "video" adalah 4 frame (siklus) per detik dan ditentukan oleh kemampuan SD. Untuk aplikasi hipotetis (?) Dalam robot sederhana - cukup.
Yang utama adalah bahwa pengambilan video membutuhkan sedikit sumber daya dari mikrokontroler, masih ada kemungkinan untuk tindakan lain dan bahkan untuk pengenalan gambar, jika perlu.
Ada juga upaya untuk melakukan AGC (eksposur otomatis), tetapi keuntungannya terlalu non-linear. Pada penguat operasional dapat dilakukan di versi berikutnya.
Sumber:
Arsip dengan sumber untuk CodeVisionAVR dan penerima di VBasic 6
Alexander