BigDog adalah robot Boston Dynamics pertama yang dikenal luas. Dalam banyak hal, dialah yang "membuat nama" pencipta perusahaannya. Sebuah robot untuk militer, ditinggalkan oleh militer, dan robot Boston Dynamics pertama, yang ditendang oleh pengembang ke kamera.
Sekarang proyek telah mengakhiri itu, tetapi telah menjadi dasar untuk pengembangan selanjutnya perusahaan - Cheetah dan Spot baru, video yang dengan cepat menjadi viral.
Hari ini kami akan mencoba memahami perangkat BigDog dari kata-kata pengembangnya. Para penulis menerbitkan artikel asli kembali pada tahun 2008, tetapi masih (semacam) belum diterjemahkan ke dalam bahasa Rusia. Ini bercerita tentang komponen utama robot dan algoritma yang mengkoordinasikan gaya berjalannya. Tujuan dari proyek BigDog adalah menciptakan perangkat yang berdiri sendiri dengan kaki dengan kemampuan untuk bergerak di atas medan yang kasar. Mereka harus lebih unggul dari kendaraan beroda dan dilacak yang ada. Sistem yang ideal harus pergi ke mana pun orang atau hewan dapat pergi, berjalan selama berjam-jam dan membawa berat dalam bentuk bahan bakar dan muatannya sendiri. Dia cukup pintar untuk melintasi medan dengan intervensi dan kontrol manusia yang minimal.
Diciptakan oleh robot BigDog membantu mengambil beberapa langkah untuk mencapai tujuan ini, meskipun masih ada banyak pekerjaan di depan.
BigDog memiliki sistem terpasang yang menyediakan daya, daya, pengumpulan data lingkungan, pemantauan, dan komunikasi. Daya disuplai oleh ICE dua langkah berpendingin air, yang menyediakan sekitar 15 hp. Ini menggerakkan pompa yang memberikan oli hidrolik melalui sistem filter, manifold, baterai ke aktuator kaki robot. Aktuator adalah silinder hidrolik gesekan rendah yang dikendalikan oleh katup servo dua tahap. Setiap aktuator memiliki sensor yang memantau posisi dan kekuatan sambungan. Setiap kaki memiliki 4 aktuator hidrolik yang memberi makan sendi. Penukar panas yang dipasang di badan BigDog mendinginkan oli, dan radiator mendinginkan mesin untuk operasi yang stabil.
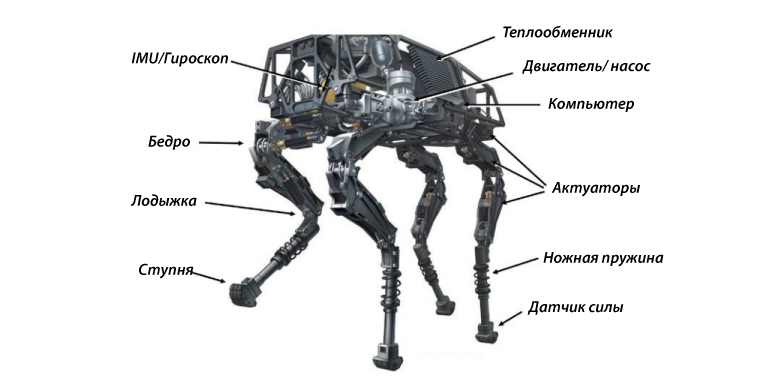 Elemen Desain Utama dari BigDog
Elemen Desain Utama dari BigDogKomputer terpasang mengendalikan perilaku BigDog, mengontrol sensor, dan bertanggung jawab untuk komunikasi dengan operator jarak jauh. Ini juga mencatat sejumlah besar data teknik untuk analisis kinerja, analisis kesalahan, dan dukungan operasional.
BigDog memiliki sekitar 50 sensor. Sensor inersia mengukur posisi dan akselerasi tubuh, sensor sendi mengukur pergerakan dan kekuatan aktuator artikular. Komputer terpasang memproses informasi dari semua sensor ini untuk memberikan perkiraan bagaimana robot bergerak. Kelompok sensor lain mengontrol homeostasis BigDog: tekanan hidrolik, aliran dan suhu, kecepatan engine, dll.
Komputer on-board melakukan fungsi pemantauan level rendah dan tinggi. Sistem tingkat rendah mengontrol posisi servos dan nutrisi pada persendian. Level tinggi mengoordinasikan posisi kaki untuk mengatur kecepatan, posisi dan tinggi tubuh selama gerakan. Ini juga melacak kekuatan interaksi dengan tanah untuk memastikan gerakan stabil.
BigDog memiliki banyak opsi gerak. Dia bisa bangun, berjongkok, berjalan dengan gaya berjalan merangkak, berjalan, hanya mengangkat satu kaki pada satu waktu, berlari dan berlari kencang. Kecepatan dengan gaya berjalan merangkak adalah 0,2 m / s, untuk lynx - 1,6 m / s, untuk menjalankan - 2 m / s (dalam kondisi laboratorium, indikator kecepatan maksimum adalah 3,1 m / s). Selain itu, robot bisa melompat 1,1 meter.
BigDog biasanya dikendalikan oleh operator manusia yang bekerja dengan unit kontrol yang terhubung ke robot melalui radio IP. Operator menyediakan kontrol gerakan dan kecepatan tingkat tinggi. Dia juga dapat memesan robot untuk memulai atau menghentikan mesin, berdiri, duduk, berjalan atau berlari.
[Tentang bagaimana algoritma navigasi otonom untuk robot dikembangkan, Anda dapat membaca di sini ]Sistem penglihatan stereo dan lidar diintegrasikan ke dalam robot. Sistem visi stereo yang dikembangkan oleh Jet Propulsion Laboratory terdiri dari sepasang kamera stereo, komputer, dan perangkat lunak visual. Ini digunakan untuk mendapatkan bentuk lanskap 3D di depan robot dan menemukan jalannya. Lidar diperlukan agar BigDog dapat mengikuti seseorang tanpa perintah operator tambahan.
Kontrol gaya berjalan
Untuk bergerak dengan kecepatan manusia, BigDog menggunakan gaya berjalan trot dinamis seimbang. Ini menyeimbangkan menggunakan kecepatan lateral dan akselerasi, ditentukan oleh perilaku kaki yang dirasakan dalam kombinasi dengan sensor inersia.
Sistem kontrol BigDog mengoordinasi kinematika dan reaksi-reaksi gerak robot, merespons perintah postural dasar. Pengontrol mendistribusikan beban di antara kedua kaki untuk mengoptimalkan daya dukungnya. Beban vertikal pada tungkai dijaga semaksimal mungkin, dan setiap tungkai menghasilkan reaksi berbasis tanah yang diarahkan pada pinggul untuk mengurangi gesekan.
Algoritme kiprah yang bertanggung jawab untuk komunikasi antar anggota tubuh memicu pergerakan kaki. Ini dikoordinasikan oleh model kaki virtual. Skema kontrol berjalan BigDog umum dapat direpresentasikan sebagai berikut:
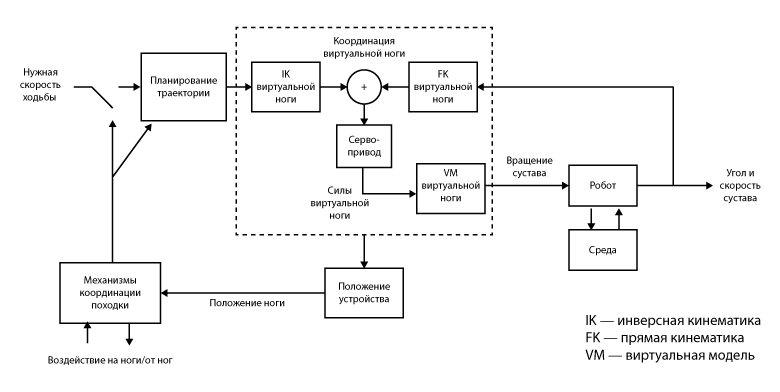 Pola Kontrol Berjalan BigDog
Pola Kontrol Berjalan BigDogKami mengembangkan algoritme berjalan untuk medan kasar dan mengujinya dalam pemodelan fisik sebelum menguji robot. Robot simulasi berjalan di sepanjang lereng dengan sudut hingga 60 derajat. Algoritma pergerakannya bervariasi tergantung pada apakah ia bergerak pada permukaan datar atau pada lereng. Selain itu, memperhitungkan hambatan tak terduga di jalan, seperti batu atau lubang.
Pemodelan fisik digunakan untuk mengembangkan algoritma gaya berjalan.Sistem kontrol menggunakan informasi dari sensor artikular untuk menentukan apakah "kaki" saat ini di tanah dan menentukan beban pada setiap ekstremitas dan drive. Algoritme keadaan mengontrol posisi tubuh, mengoordinasikan kinematika tungkai dengan kekuatan reaksi kaki yang bersentuhan dengan tanah. Algoritma state mengimplementasikan gerakan kaki yang benar pada permukaan yang tidak rata. Ini memungkinkan Anda untuk mengontrol belokan, langkah, dan ketinggian tubuh relatif terhadap tanah, sehingga memungkinkan BigDog beradaptasi dengan perubahan lanskap tanpa sensor dengan tingkat persepsi medan yang lebih tinggi.
BigDog beradaptasi dengan medan dengan dua cara. Ini mengatur ketinggian dan sikap tubuh terhadap lanskap dan mengontrol di mana harus meletakkan kaki Anda. Saat naik dan turun dari lereng, tubuh robot miring. Lereng yang curam (lebih dari 45 derajat) robot mengatasi dengan memperbaiki gaya berjalan dan menggunakan langkah-langkah yang lebih kecil.
Di akhir artikel, penulis berterima kasih kepada semua 23 orang dari tim BigDog dan berbagi rencana mereka untuk masa depan: untuk memperkuat tubuh robot, membuat BigDog mandiri dan membuatnya lebih tenang (mesin bensin membuat suara seperti sepeda motor). Poin terakhir, seperti yang ditunjukkan waktu, tetap menjadi masalah serius.Lebih lanjut tentang robotika di robo-hunter.com: