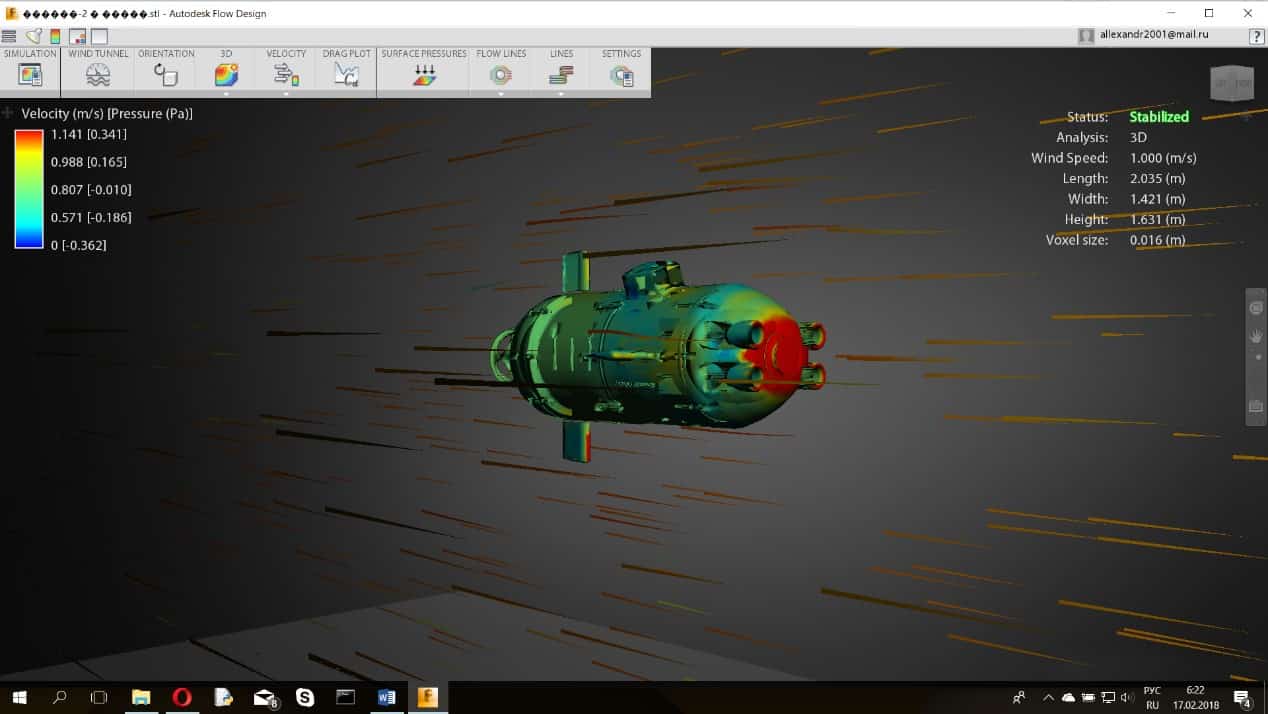
Hai semuanya, saya pernah melihat bahwa kapal selam dengan jarak jauh, fungsionalitas yang kurang atau kurang dapat ditoleransi dan kurang dari iphone baru tidak untuk dijual, dan memutuskan untuk melakukannya sendiri.
Itu dikendalikan melalui Internet, dan sekarang Internet seluler mencakup sebagian besar wilayah Rusia. Kolam kecil sepenuhnya tertutup olehnya, dan dari pantai Internet besar bahkan ada puluhan kilometer dari pantai.
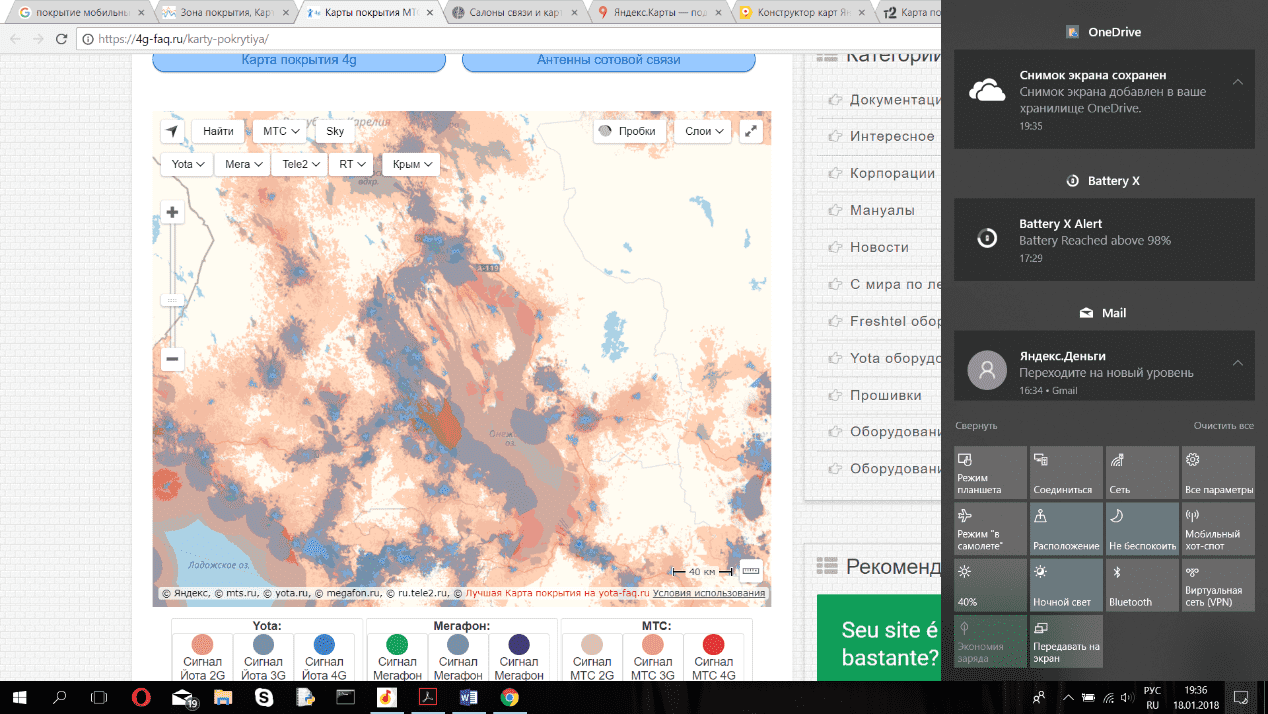
Juga, Elon Musk mengumumkan penciptaan Internet di seluruh dunia.
Saya memutuskan untuk mencetak perahu di printer 3D, model dibuat di compass_3d. Kode ini ditulis dengan python 3.
Tautan ke github .
Peralatan dan material
• printer 3d
• Raspberry pi Komputer Papan Tunggal
• modem 4g (2 buah)
• laptop (2 buah 1st - transmitter, 2nd - server)
• servomotor
• webcam
• mesin
• Baterai Pb
• lainnya (relay, besi solder, sensor, perekat, cat, sealant ...).
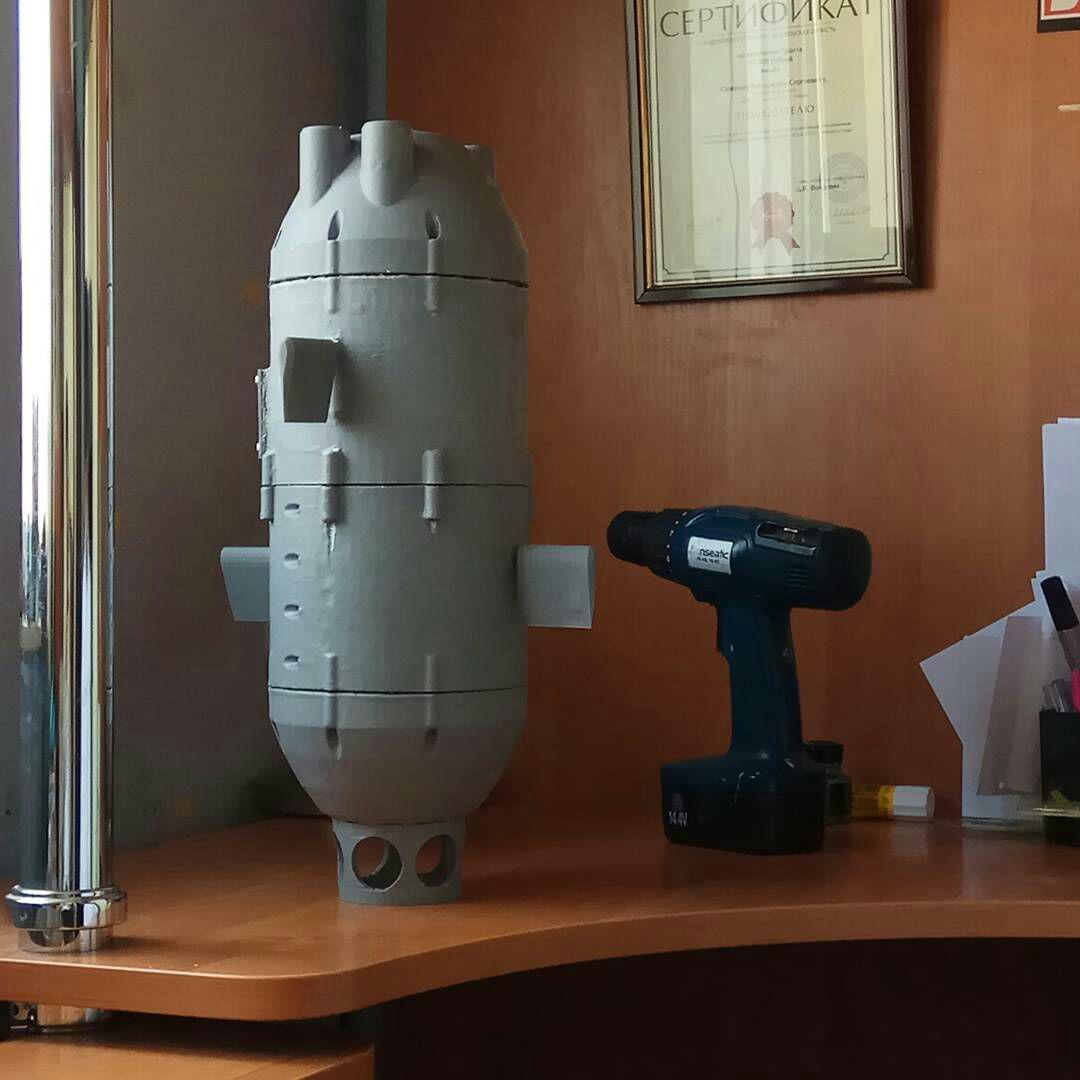
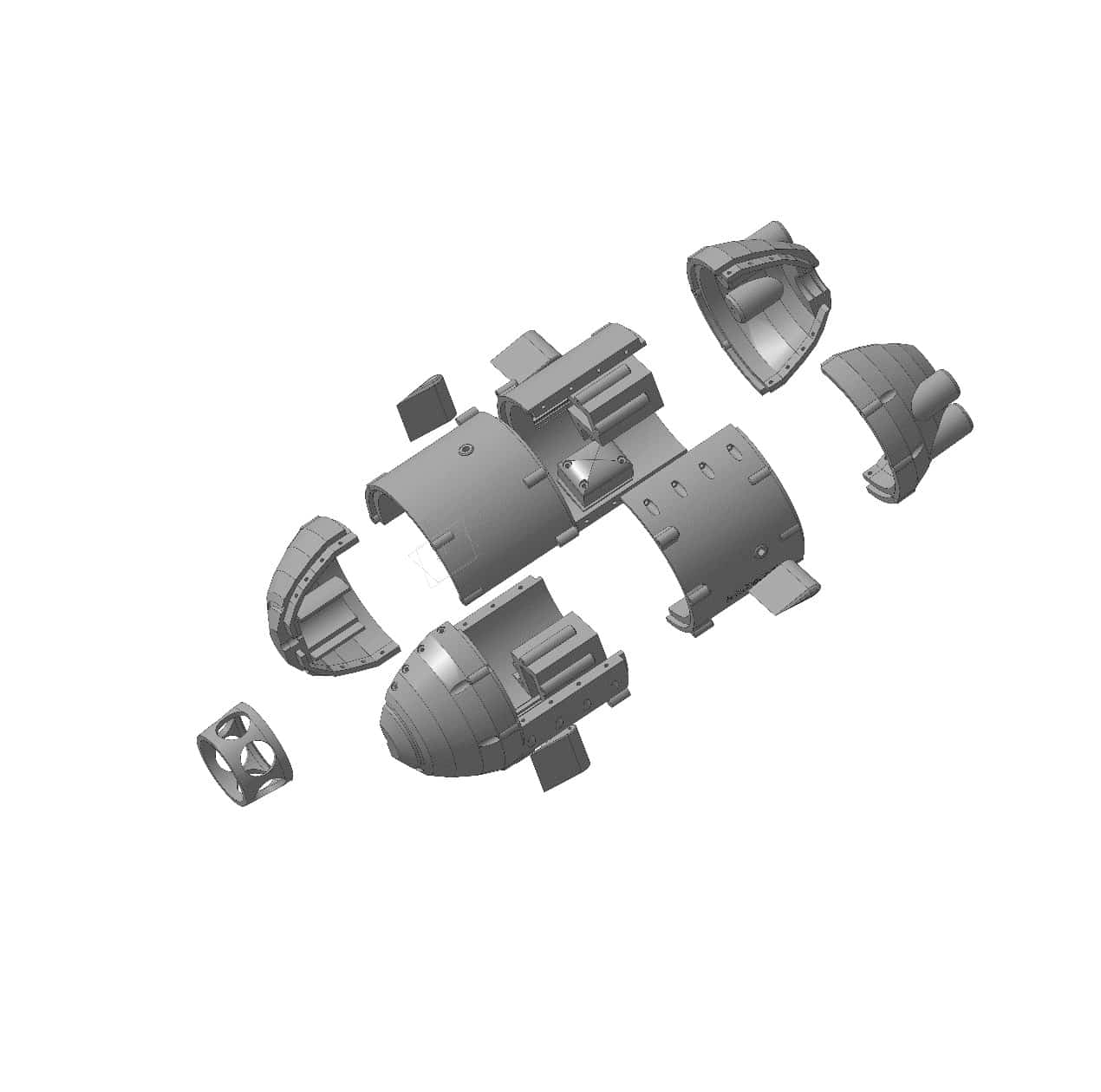
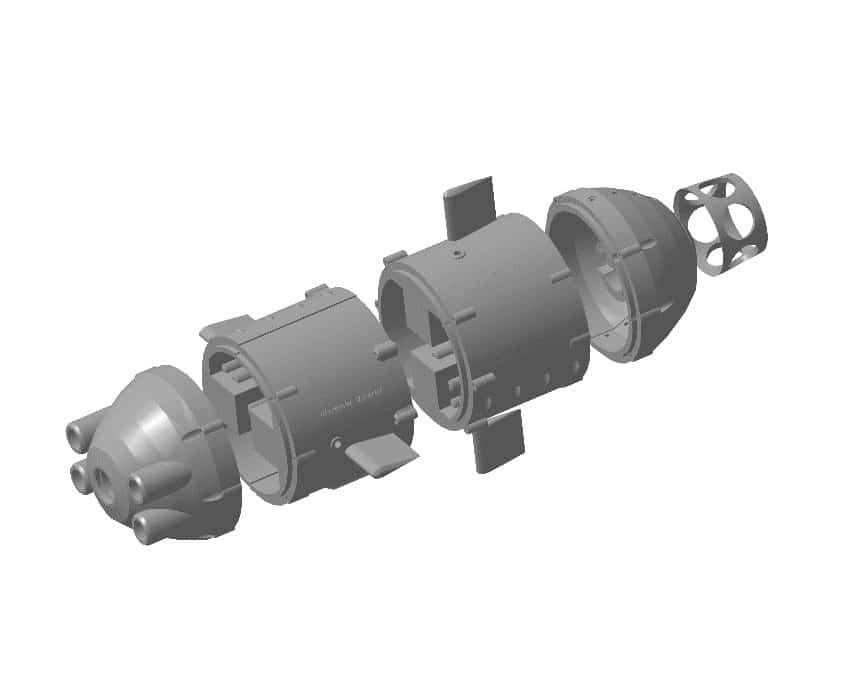
Detail
Seperti yang telah disebutkan, detail dicetak pada printer 3D dengan lapisan 0,3 mm dengan nozzle 0,4 mm
pada meja aluminium dengan substrat lem bf2 untuk daya rekat yang lebih baik, detail terpanjang dicetak sekitar 14 jam. Gambar perakitan bawah.
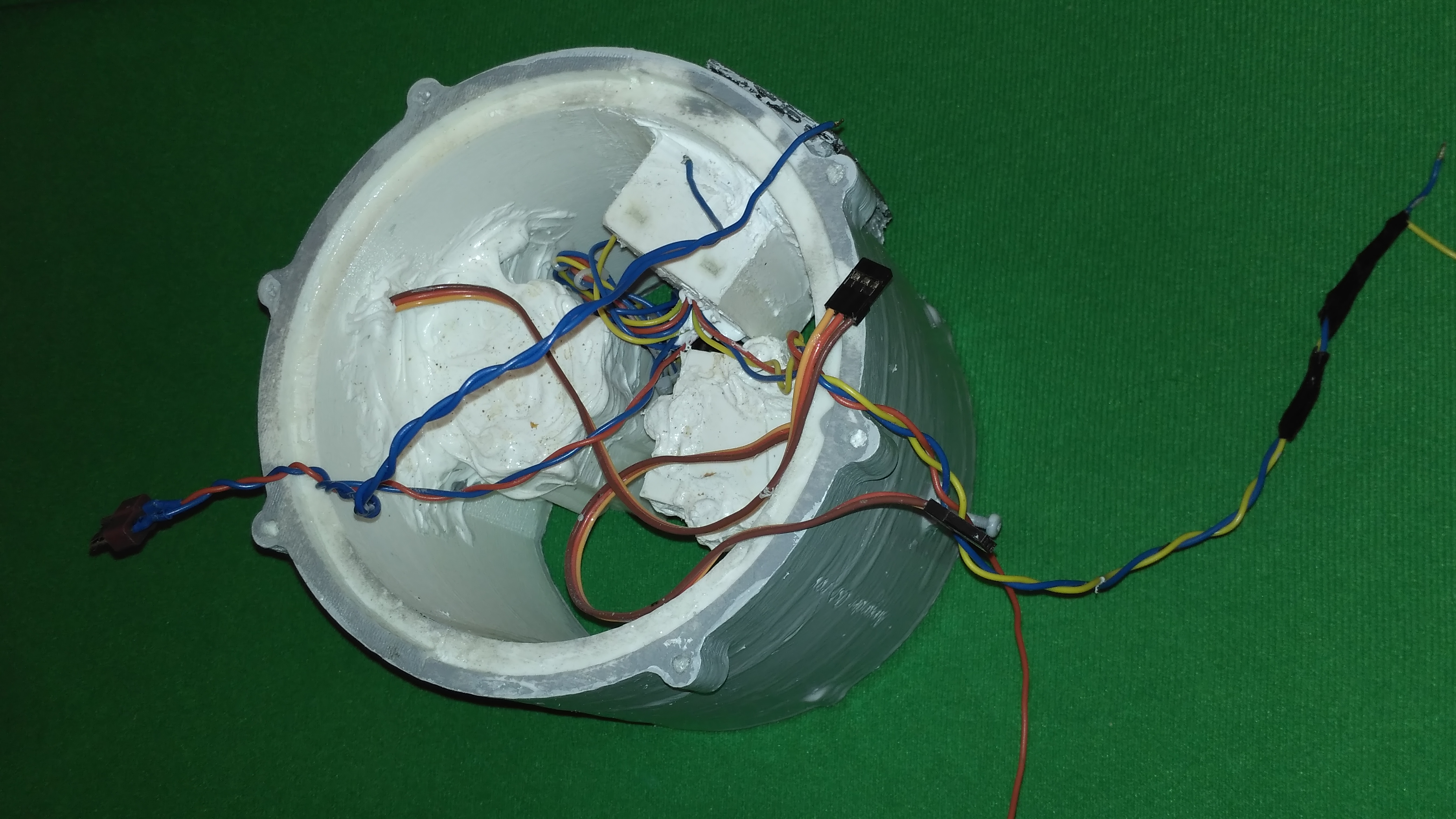
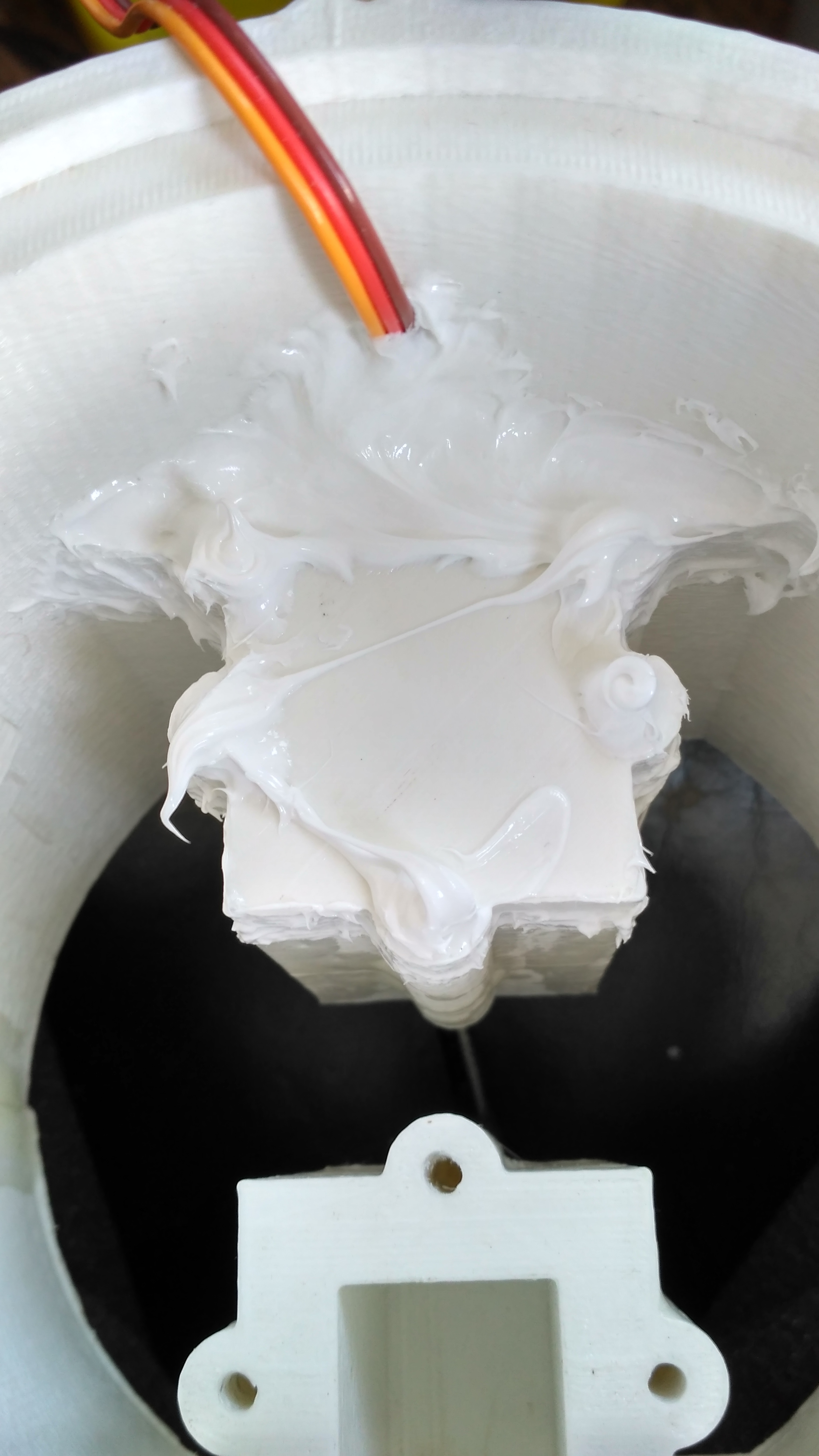
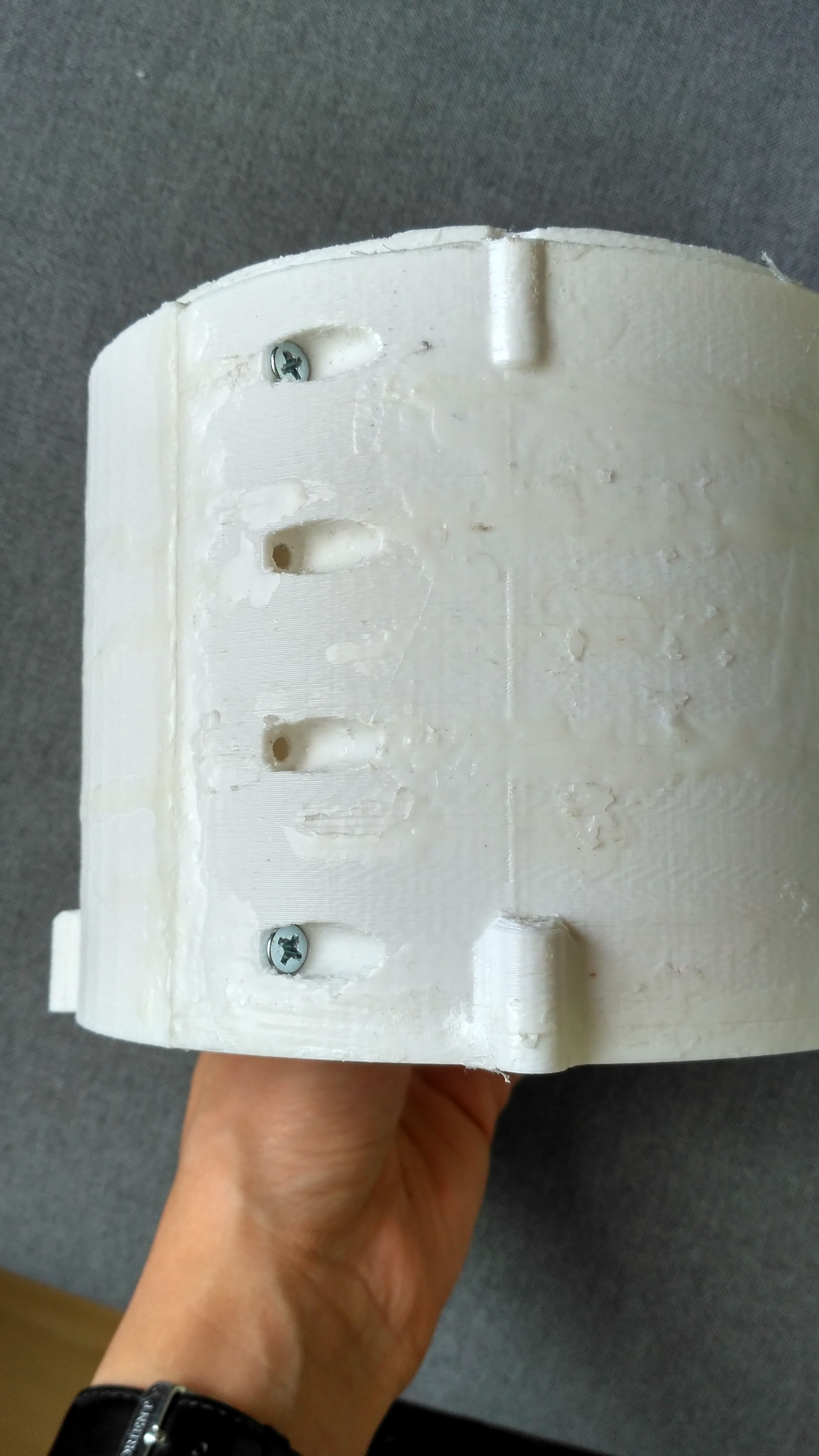
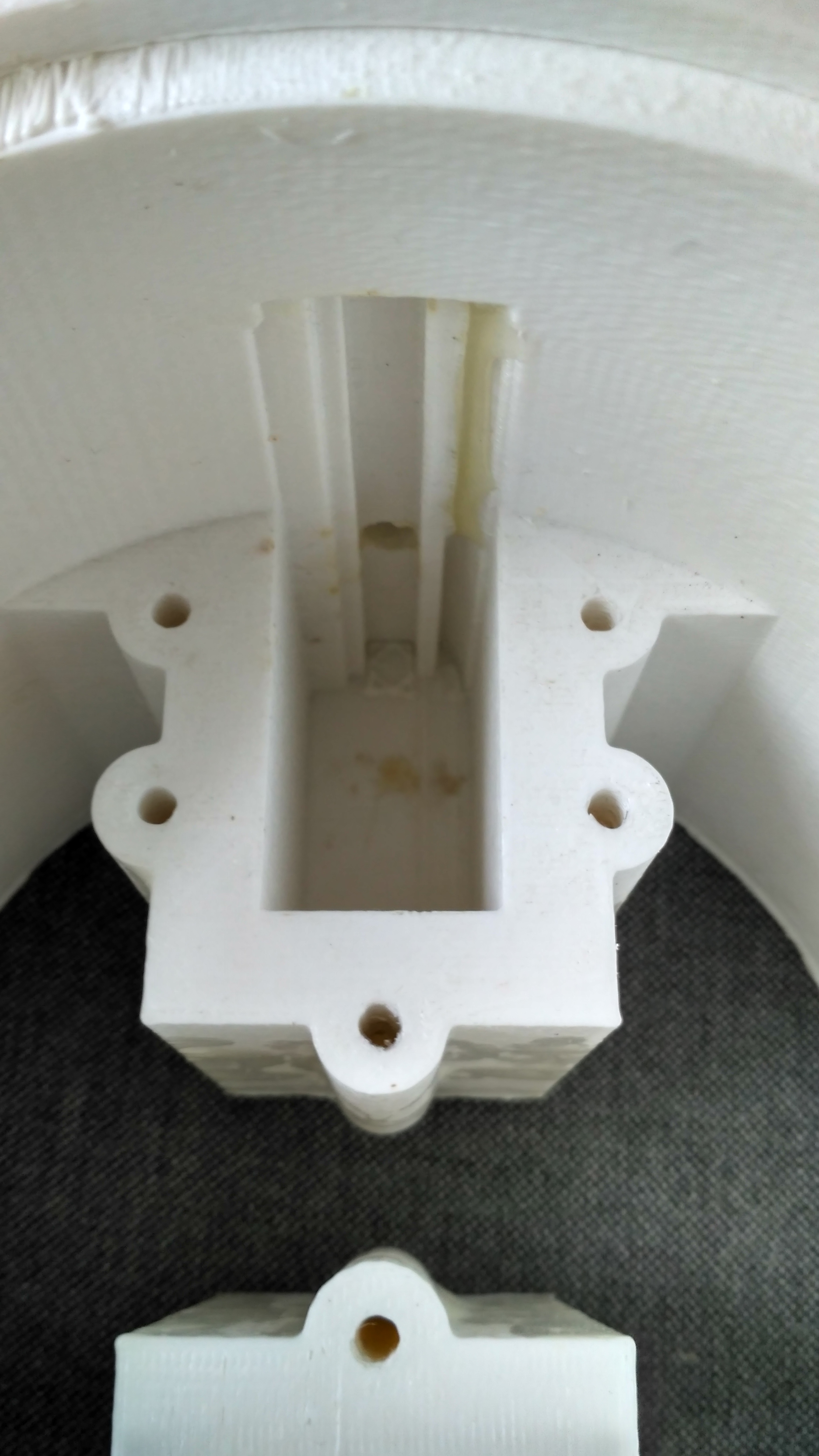
Sesak
Untuk sesak, servomotors dan motor BC terkemuka disegel dengan sealant silikon dan gemuk. Perahu itu sendiri, karena ukuran bagian-bagiannya dan kecenderungan plastik abs menyusut (ukuran setelah pencetakan), di beberapa tempat tempat-tempat ini retak dengan lem untuk pvc, di tempat-tempat sambungan silikon sealant sendi baut untuk akuarium.
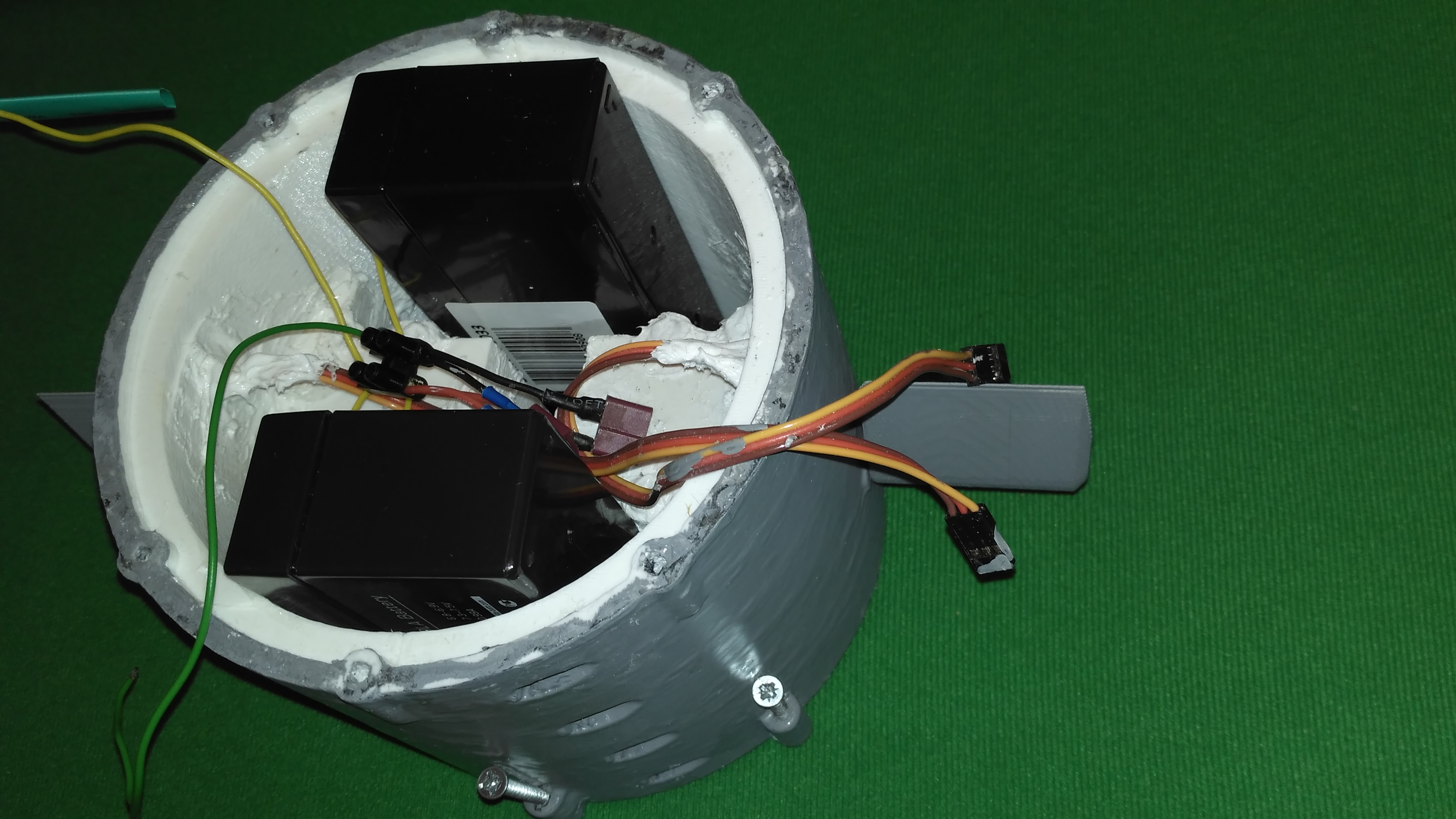
Nutrisi
Sebagai sumber daya - dua baterai timbal 6v yang dihubungkan dengan seri yang sanggup menghasilkan 3,3 AmH, baterai timbal digunakan karena fakta bahwa harganya lebih murah, lebih sedikit kontak pengisian harus dipimpin di luar kapal dan mereka juga berat (kapalnya terlalu tebal dan rata-rata kepadatan harus sekitar 1000 kg / m ** 3).
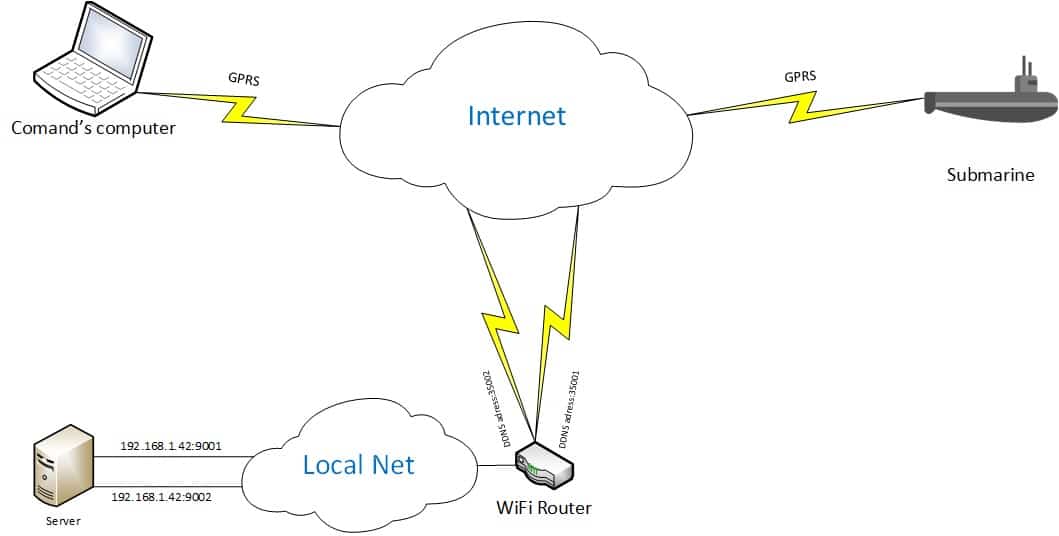
Transfer data
Sekarang tentang hal utama, transfer data.
Karena air menyerap EMV, modem harus dibawa ke atas, sehingga kapal beroperasi dengan pelampung.
Di jaringan lokal, di rumah, server diinstal yang mentransfer semua yang datang dari satu alamat ke alamat lainnya. Saat ini, kapal mengirimkan video, dan laptop memerintahkan kontrol. Ini semua diatur melalui soket.
Karena saya ingin melakukan sebanyak mungkin untuk membuatnya lebih menarik
, dan untuk menemukan kembali roda , saya melakukan transmisi video sendiri, seperti yang sudah saya katakan, jadi tanpa menemukan sesuatu yang lebih baik, saya memutuskan untuk tidak mentransfer video, tetapi frame dalam jpg. Satu gambar ditransmisikan, maka kata berhenti "berhenti" diracuni, dan karena itu tidak terjadi dalam jpg, kode dengan mudah memisahkan di mana dan kapan menampilkan gambar.
while bytes('stop','utf-8') not in data: image_result.write(data)
Putar ulang gambar, dan penerimaan kamera menggunakan opencv. Belum ada kompresi, jadi penundaannya selama 9-13 detik. Tombol kontrol ditulis menggunakan Tkinter.
Model bawah 3D
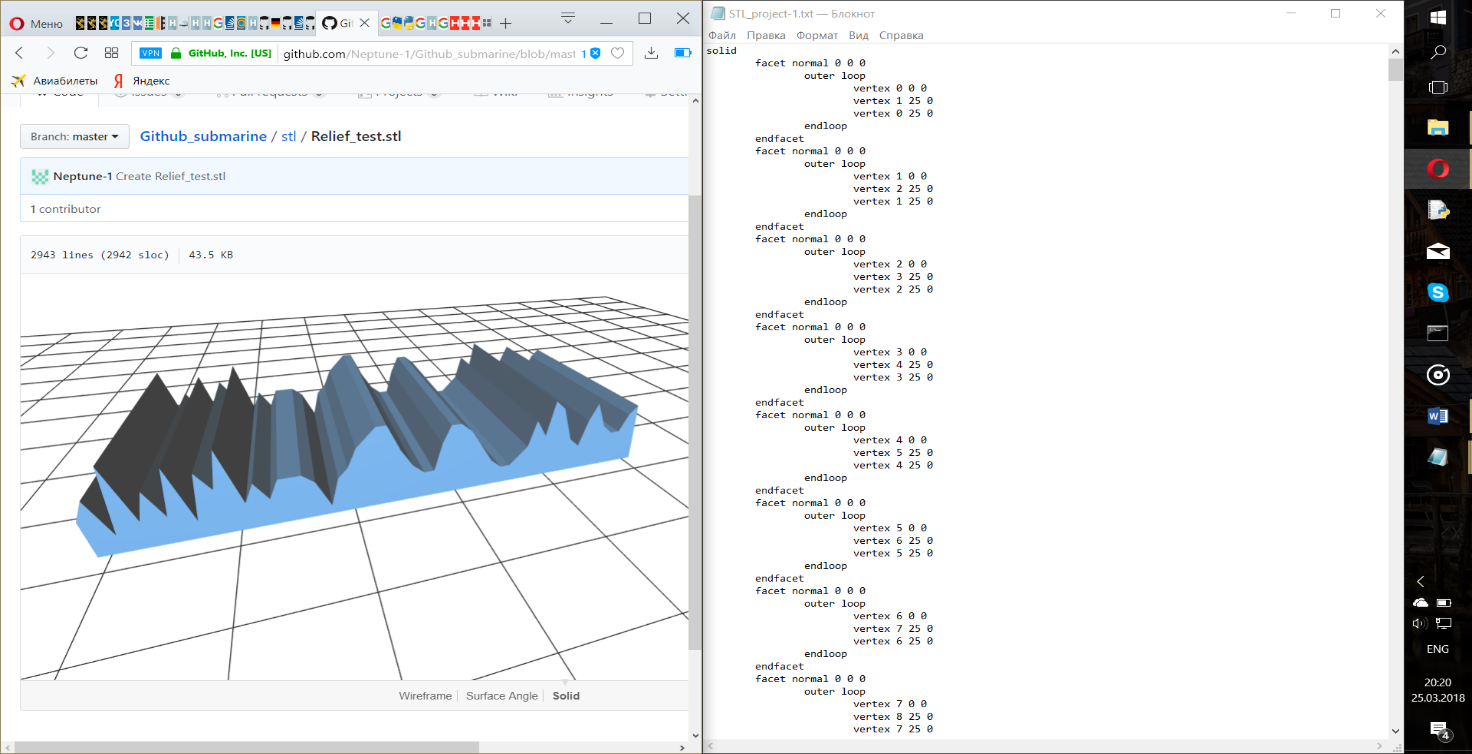
Saat mengunggah model 3D ke github, saya melihat apa file stl terdiri dari, dan memutuskan untuk menulis kode untuk membuat model 3D topografi bawah dari daftar jarak yang diambil dengan itu oleh pencari jarak ultrasonik (yang belum diinstal).
contoh tetrahedron.stl dalam txtsolid
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 2 0 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 2 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 2 0 0
endloop
endfacet
endsolid
Berikutnya adalah foto yang menarik dan tidak terlalu




Ringkasan
Ini sebenarnya yang ingin saya sampaikan, ide utama saya yang tidak mengerti adalah pembuatan alat yang memungkinkan menerima informasi dari bawah air pada jarak yang sangat jauh dari laptop kontrol. Sampai jumpa, sampai artikel selanjutnya.