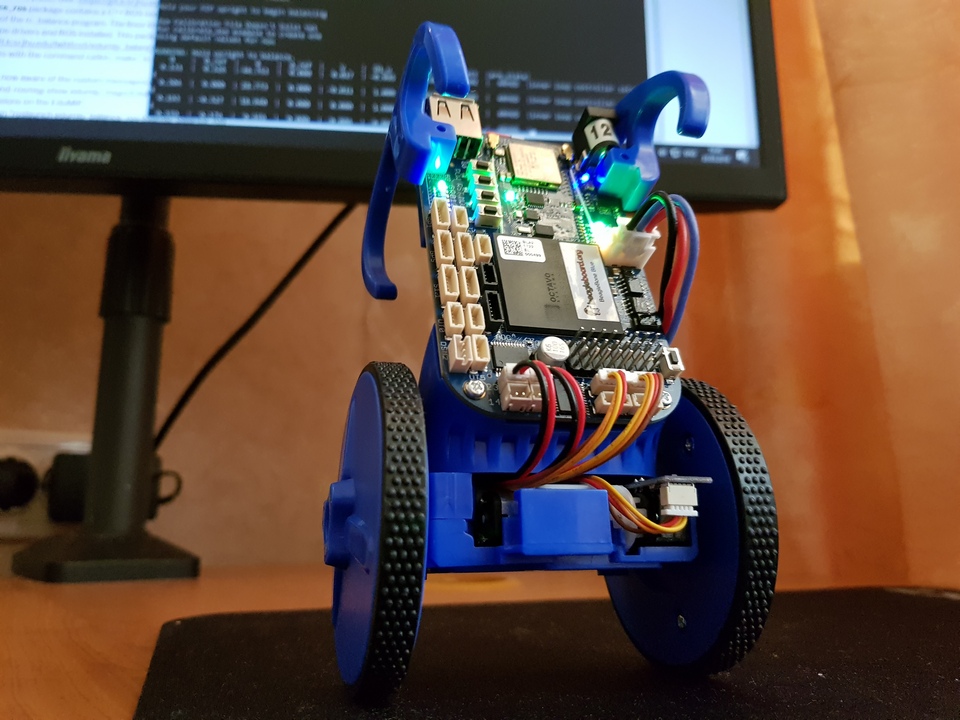
Robot dapat menjaga keseimbangan pada dua roda, berkendara cukup cepat. Di papan penuh linux, ada wifi. Anda dapat memprogram melalui antarmuka web. Ada instruksi dan sumber untuk menjalankan ROS di atasnya. Secara umum, banyak peluang untuk berkreasi.
Saya sudah lama ingin bermain dengan robot dengan giroskop, akselerometer, kompas, dan ya untuk belajar ROS. Saya tidak ingin menyolder dan mengotak-atik apa pun seperti sebelumnya. Jadi BeagleBone memiliki satu PC berbayar dengan kartu ekspansi built-in untuk robot BeagleBone Blue, yang memiliki sensor dan driver mesin yang diperlukan. Setelah beberapa waktu, kit untuk merakit robot EduMip di negara bagian diselesaikan untuknya dan mereka menulis instruksi untuk meluncurkan ROS di atasnya dengan sumber. Secara umum, saya terbakar.
Apa yang termasuk dalam kit:
- wheelbase dengan motor / roda gigi / roda / encoders / kabel
- 2-cell 1400 mAh LiPo
- Pengisi daya 12 volt
- Biru tulang beagle
EduMIP dibuat di Laboratorium Robotika LAB UCAN DIEGO KOORDINASI ROBOTICS. Digunakan dalam kursus online, universitas, dan lingkaran robotika.
EduMIP adalah platform pembelajaran:
- Pemodelan dinamis dan kontrol umpan balik dari sistem yang tidak stabil.
- Perencanaan gerakan robot dan menghindari tabrakan.
- Kontrol motor DC melalui H-bridges dan encoders.
- Penilaian orientasi melalui IMU dan Barometer.
- Komunikasi melalui WiFi (802.11 b / g / n) dan Bluetooth (4.1 / BLE).
- Mengisi, menyeimbangkan, melindungi, dan memantau baterai LiPo 2 sel (termasuk).
- Multithreaded, pemrograman C yang berorientasi acara di Debian Linux.
EduMIP kompatibel dengan Python, ROS, MATLAB & Simulink, dan LabVIEW.
Sasis EduMip dikembangkan bekerja sama dengan WowWee.
EduMIP mudah dikembangkan dengan pencetakan 3D, ada perpustakaan perangkat lunak yang luas untuk jutaan sensor standar dan perangkat komunikasi melalui: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (servos, ESC), GPIO, ADC.
Semua sama, saya harus membeli besi solder untuk menyolder kawat ke motor, untuk uang ini kita bisa segera menyolder. Sisa dari kit ini berkualitas tinggi dan dikemas dengan baik.
Dikumpulkan dalam satu malam. Motor dan roda menurut saya licin. Saya senang bahwa itu tidak perlu untuk solder praktis, semua elektronik di satu papan. Baterai diisi melalui papan, dari skrip Anda dapat melihat tegangan baterai.
Plus yang tidak diragukan lagi bagi saya adalah bahwa BedgleBone memiliki built-in wifi dan linux penuh. IDE Cloud9 segera tersedia dan Anda dapat memprogram robot melalui udara dengan python dan bahasa pemrograman lainnya. Board ini memiliki memori internal 4 gigabita yang sudah ditulis Linux Debian, sehingga Anda dapat memulai dan memprogram tanpa flash drive. Hanya untuk ROS, Anda perlu menulis gambar ke kartu memori.
Pada bagian selanjutnya saya akan menganalisis cara memprogramnya, sementara saya terjebak pada cara menginstal perpustakaan tambahan dari robot ini di Debian.