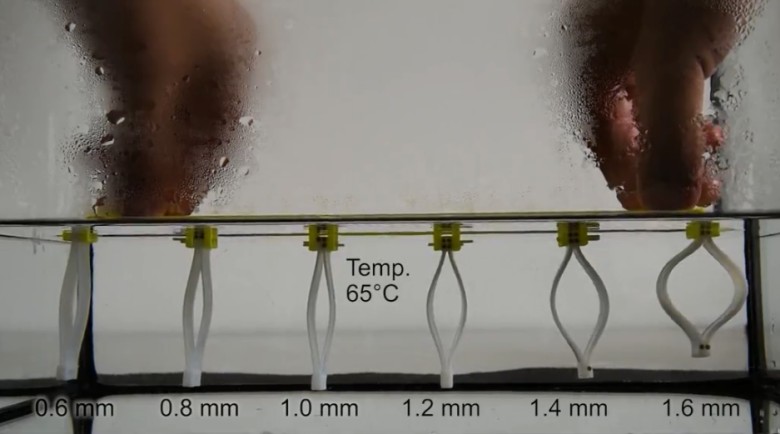
 Reaksi strip polimer fleksibel terhadap perubahan suhu tergantung pada ketebalannya. Yang ditunjukkan di sini adalah strip dari 0,6 mm hingga 1,6 mm bila ditempatkan di air pada suhu 65 ° C. Kecepatan pelurusan bervariasi dari 7 hingga 37 detik, yang memungkinkan Anda untuk memprogram aksi robot dalam urutan tertentu
Reaksi strip polimer fleksibel terhadap perubahan suhu tergantung pada ketebalannya. Yang ditunjukkan di sini adalah strip dari 0,6 mm hingga 1,6 mm bila ditempatkan di air pada suhu 65 ° C. Kecepatan pelurusan bervariasi dari 7 hingga 37 detik, yang memungkinkan Anda untuk memprogram aksi robot dalam urutan tertentuInsinyur di Institut Teknologi California dan rekan-rekan dari Sekolah Teknik Tinggi Swiss di Zurich
telah menciptakan robot yang dapat bergerak secara mandiri tanpa menggunakan motor, servo atau sumber daya. Kedengarannya seperti mesin gerak abadi? Tidak juga. Faktanya adalah bahwa setiap pasang dayung atau "otot" hanya mampu
satu gerakan dayung setelah robot diturunkan ke dalam air. Tetapi yang terpenting adalah bahwa otot dan dayung dapat sebanyak yang Anda suka - dan mereka dapat bekerja pada interval waktu yang berbeda satu demi satu. Dengan demikian, Anda dapat
memprogram lintasan robot, serta melakukan berbagai tindakan - misalnya, membuang kargo diikuti dengan manuver menghindar. Penelitian ini didanai oleh Kantor Penelitian Angkatan Darat.
Terlepas dari kesederhanaan yang tampak, ini adalah yang pertama dari perangkat sejenisnya yang menggunakan deformasi material untuk tindakan suhu yang diprogram dalam air. Prinsip operasi ditunjukkan dalam
video demonstrasi .
Daftar demo video
- Satu pukulan . Jarak yang ditempuh dari satu langkah kira-kira sama dengan 1,15 panjang robot.
- Reaksi "otot" terhadap perubahan suhu tergantung pada ketebalan pita polimer fleksibel. Video menunjukkan garis-garis dengan ketebalan 0,6 mm hingga 1,6 mm ketika ditempatkan di air pada suhu 65 ° C. Kecepatan pelurusan bervariasi dari 7 hingga 37 detik.
- Pergerakan robot pendayung dengan dua pasang dayung . Urutan stroke diatur oleh ketebalan otot-otot pada pasangan dayung pertama dan kedua. Jarak yang ditempuh dari double stroke adalah sekitar 1,9 kali panjang robot.
- Gerakan dengan belok kiri . Sepasang dayung pertama menggerakkan robot ke depan sekitar 0,5 tubuhnya, dan dayung dari tingkat kedua memutar tubuhnya sekitar 21,45 °.
- Gerakan dengan dua putaran . Setelah pukulan pertama, robot berputar sekitar 21,64 ° ke kiri, dan setelah pukulan kedua, itu berubah sekitar 21,45 ° ke kanan.
- Otot terbuat dari bahan lain yang mengembang pada suhu yang berbeda dari 40 ° C. Video menunjukkan bahwa materi sebelumnya tidak merespons suhu ini. Dengan demikian, para ilmuwan dapat memprogram robot untuk berbagai gerakan tergantung pada suhu sekitar.
- Contoh algoritma yang kompleks . Robot berenang jarak yang ditentukan, menjatuhkan beban, dan kemudian mengapung ke arah yang berlawanan. Kondisi pertama disediakan oleh strip polimer tipis yang terbakar sebelumnya. Beban diamankan oleh strip tebal yang bereaksi kemudian dan melepaskan beban setelah robot telah berlayar jarak yang diprogram.
- Mekanisme internal aktuator menunjukkan bagaimana otot menekan dan mentransfer mekanisme bistable dari satu keadaan keseimbangan ke yang lain.
Menurut pengembang, penelitian ini dalam arti "menghapus batas antara bahan dan robot," karena bahan itu sendiri bertindak sebagai mesin di perangkat: "Contoh kami menunjukkan bahwa kami dapat menggunakan bahan terstruktur yang cacat sebagai respons terhadap sinyal lingkungan, untuk kontrol dan pergerakan robot,
kata Chiara Daraio, seorang profesor teknik mesin dan fisika terapan di California Institute of Technology's engineering dan ilmu terapan, salah satu penulis artikel ilmiah.
Robot digerakkan oleh strip polimer fleksibel, yang menyusut ketika dingin dan membentang saat dipanaskan. Polimer diposisikan sedemikian rupa untuk mengaktifkan sakelar bistable dalam tubuh robot, yang pada gilirannya dilekatkan pada elemen yang dapat bergerak, misalnya, ke dayung ke sapuan ke depan.
Studi ini didasarkan pada
karya ilmiah sebelumnya pada rantai elemen bistable untuk mentransmisikan sinyal dan merancang gerbang logika dari mesin yang dapat diprogram.
Selain suhu, robot dapat diprogram untuk melakukan tindakan tergantung pada kondisi lain - misalnya, menanggapi perubahan keasaman medium.
Artikel ilmiah ini
diterbitkan 15 Mei 2018 dalam jurnal
Prosiding National Academy of Sciences Amerika Serikat (doi: 10.1073 / pnas.1800386115,
pdf ).