Akselerasi: wanita tua itu mengklaim bahwa gearbox "Moskvich" di bawah standar
© M. Zhvanetsky"Empat puluh pertama"
Pada tahun 1985, sebuah mobil baru, Moskvich-2141, muncul di Uni Soviet.
Direncanakan bahwa mobil dari kelompok ketiga dari kelas kecil ini akan menempati ceruk konsumen antara massa "delapan" VAZ-2108 dari kelompok kedua dari kelas kecil dan Volga GAZ-24-10 yang bergengsi dari kelas menengah.
Sebuah mobil yang cukup besar, berkecepatan tinggi, nyaman (menurut standar Soviet) dengan beberapa elemen apik (radio VHF dalam konfigurasi standar!), Impian orang Soviet.
Selain ... sejumlah alasan di luar ruang lingkup artikel ini, ini terhambat oleh kurangnya mesin yang cukup kuat, serta transmisi otomatis.
Dan jika masalah dengan mesin itu seharusnya diselesaikan dari waktu ke waktu dengan beralih dari UZAM-331.10 dan VAZ-2106 ke keluarga mesin AZLK-21414 yang baru, di mana pembangunan pabrik baru dimulai, maka semuanya menjadi lebih menyedihkan dengan transmisi otomatis. Sebenarnya, tidak ada satu pun mobil Soviet besar yang dapat membanggakan transmisi otomatis, termasuk batas mimpi Volga ke-24 dari nomenklatur Soviet.
Namun, masih ada beberapa ide, dan bagi mereka yang tertarik dengan sejarah teknologi otomotif Soviet, selamat datang untuk memotong
Gagasan untuk membuat transmisi otomatis berdasarkan variator untuk Moskvich muncul bahkan sebelum kelahiran resmi Moskvich ke-41, pertama dalam bentuk proyek diploma, yang dibuat oleh penulis artikel ini (kemudian mahasiswa di MAMI) di AS, dan kemudian di UKER AZLK atas inisiatif penulis (dan terutama dengan tangannya sendiri), pertama "di waktu luangnya dari pekerjaan utama", dan kemudian dalam kerangka berbagai "rencana untuk menciptakan teknologi yang menjanjikan" *.
- Perlu dicatat bahwa selain transmisi variabel kontinu yang dikembangkan untuk mobil seri keluarga Moskvich-2141 yang dipertimbangkan dalam artikel tersebut, transmisi variabel kontinu lain yang menarik berdasarkan torus variator dikembangkan di AZLK sebagai bagian dari proyek Automobile of the Year 2000, tetapi “ini sangat berbeda sejarah ”, membutuhkan percakapan besar yang terpisah.
Karena transmisi ini seharusnya dipasang pada mobil dalam produksi yang sudah ada, perubahan desain yang praktis tidak dapat diterima, maka diperlukan pemasangannya yang tidak memerlukan perubahan pada bodi (hingga titik lampiran), serta perubahan pada komponen dan rakitan lainnya (misalnya , sistem pembuangan, lewat dekat transmisi, setir, terletak sedikit lebih tinggi, dll.). Ini memberlakukan pembatasan besar pada dimensi struktur.
Misalnya, dalam foto ini pada kasing CVT, Anda dapat melihat "perancah" (dilingkari merah), yang dibuat untuk membubarkan dengan celah yang diperlukan dengan terowongan tubuh.CVT
CVT "V-chain" dengan katrol halus dari perusahaan Jerman
PIV , yang banyak digunakan dalam penggerak generator laut, mesin kertas, dan peralatan industri lainnya yang membutuhkan perubahan rasio gigi yang mulus, diambil sebagai dasar untuk transmisi variabel yang terus menerus.
Volkswagen merancang transmisi variabel kontinyu berdasarkan variator yang sama, dan sedikit kemudian,
LuK , yang menyerap PIV, menciptakan transmisi
Multitronic variabel kontinyu untuk AUDI.
Beberapa kata tentang mengapa variator PIV dipilih, dan bukan
Transmatic yang lebih populer saat itu. Semua hal lain dianggap sama, "sabuk" (lebih tepatnya rantai) dari variator PIV memiliki daya dukung yang lebih tinggi daripada sabuk logam Transmatic, dan seperti disebutkan di atas, pembatasan yang sangat ketat diberlakukan pada dimensi transmisi variabel kontinu. Secara umum, pada saat itu, Transmatic hanya digunakan pada mobil kecil dengan mesin dengan torsi hingga 80-100 Nm, dan dalam hal ini, transmisi variabel kontinu seharusnya bekerja dengan keluarga mesin AZLK-21414 dengan torsi hingga 160-180 Nm.
Alasan lain yang tak kalah penting adalah bahwa produksi transmisi variabel kontinu direncanakan akan dikuasai di pabrik pembuatan mesin yang ada, dan sabuk logam Transmatic memiliki desain yang terlalu spesifik yang memerlukan pengaturan produksi khusus.
Pada saat yang sama, rantai-sabuk PIV secara struktural mirip dengan rantai gigi biasa, dikembangkan dengan baik dalam produksi, banyak digunakan dalam industri. Perbedaannya hanya pada sumbu dengan permukaan khusus dari ujung yang bekerja di sepanjang permukaan kerucut yang halus dari katrol. Dalam hal ini, as roda terbuat dari baja bantalan 15, dan dari sudut pandang teknologi manufaktur sangat mirip dengan bagian-bagian dari bantalan gelinding.
Dengan demikian, produksi rantai tipe PIV dapat dikuasai di salah satu pabrik bantalan Uni Soviet.
Terlepas dari kenyataan bahwa prototipe dari transmisi variabel kontinu adalah produk sepotong, desain segera dirancang untuk produksi massal. Oleh karena itu, semua dokumentasi dibuat "dalam toleransi" sehingga perakitan dapat dilakukan tanpa bagian yang pas. Prototipe Carter, meskipun dicetak di tanah sesuai dengan model kayu, dirancang untuk cetakan injeksi. Hal yang sama dapat dikatakan tentang perincian lainnya. Jadi meskipun itu adalah prototipe, itu dibuat praktis di bawah kondisi produksi massal. Ini membedakannya dari sebagian besar produk buatan rumah yang dirakit "menggunakan file."
Sebagian besar suku cadang diproduksi di Workshop Eksperimental UAER AZLK, serta di pabrik-pabrik mobil lainnya, sebagian besar permesinan dilakukan “dengan konversi” ke
NPO AlmazDesain transmisi yang terus berubah
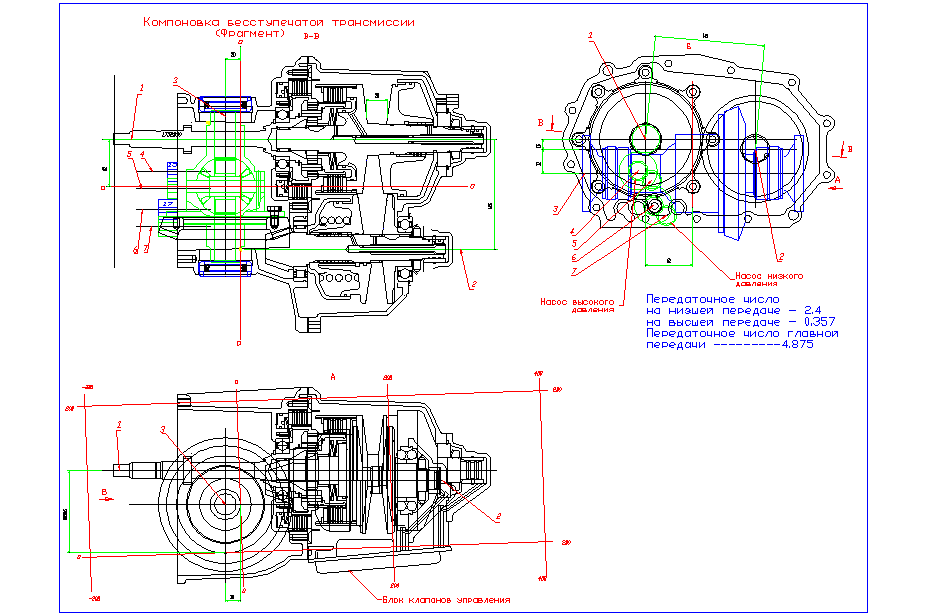
Pada diagram tata letak, Anda dapat melihat bahwa variator transmisi variabel kontinu memiliki jarak tengah antara puli penggerak dan yang digerakkan 145 mm, rasio gigi maksimum dan minimum adalah 2,4 dan 0,357 (1 / 2,8), masing-masing, yaitu kisaran rasio gigi 6,7 (rasio roda gigi sedikit asimetris untuk mengurangi beban pada rantai di "gigi bawah"). Rasio roda gigi maksimum yang relatif kecil membutuhkan rasio roda gigi utama yang cukup besar yaitu 4,875, untungnya roda gigi hypoid memungkinkan ini.
Katrol ditekan dan rasio roda gigi variator diubah menggunakan silinder hidrolik yang terletak di katrol.
Karena, tidak seperti transmisi gir, arah putaran drive dan poros yang digerakkan variator adalah sama, untuk memastikan arah rotasi yang diperlukan dari roda mobil, gir utama berubah menjadi “terbalik” (gir drive terletak di sisi lain dari drive). Selain arah rotasi yang diinginkan, ini memungkinkan untuk mendorong drive dan menggerakkan poros variator ke jarak yang diperlukan.
Akibatnya, jika kita membandingkan desain transmisi variabel kontinu ini, misalnya, dengan transmisi "terkait" dalam desain Multitronik, ternyata jauh lebih sederhana dan lebih ringkas. * Mundur diperoleh dengan menggunakan gigi planet yang bergeser dengan bantuan kopling multi-pelat "basah". Mereka juga menyediakan menggerakkan mobil, sehingga konverter torsi dalam kasus ini tidak ada. Secara umum, desain cengkeraman dan sebaliknya menyerupai skema Transmatic, tetapi ada beberapa perbedaan yang terkait dengan fitur tata letak, desain variator dan sistem kontrol hidrolik variator dan kopling. *
- "Penyimpangan liris" kecil.
Jika kita membandingkan desain transmisi variabel kontinu ini dengan Multitronic, maka mata perancang yang terlatih akan dapat melihat secara kebetulan beberapa solusi teknis. Dalam hal ini, "semua kecocokan adalah acak." Faktanya adalah bahwa publikasi terbuka pertama dari desain Multitonic hanya muncul di akhir tahun 90-an, yaitu sekitar 10 tahun setelah transmisi variabel berkelanjutan Moskvich dirancang. Tentu saja, Multitronic sebelumnya dirancang, tetapi dokumentasinya secara alami ditutup. Tampaknya hanya kebutuhan untuk mengadaptasi desain rumit variator PIV industri untuk transmisi mobil kompak memaksa para desainer untuk bergerak ke arah yang sama.
- Tetapi desain Transmatic sudah memiliki beberapa informasi yang tersedia, jadi ada beberapa pinjaman, tentu saja, dengan mempertimbangkan fitur yang terkait dengan perbedaan dalam desain sabuk logam Transmatic dan rantai PIV, posisi longitudinal mesin dan fitur dari sistem kontrol hidrolik transmisi variabel kontinu .
Akibatnya, massa transmisi variabel Moskvich terus menerus hanya mencapai 50 kilogram (dan terlepas dari kenyataan bahwa crankcases yang dilemparkan ke tanah sedikit lebih berat daripada cetakan injeksi dalam produksi massal), yang hanya 8 kilogram lebih berat daripada gearbox manual Moskvich yang biasa.
Beberapa foto lagi.Bekerja pada desain transmisi variabel terus menerus secara resmi dimulai pada tahun 1985, pada tahun 1987 mereka mampu mempercepat secara signifikan karena pertemuan selama Pameran Internasional di Sokolniki dengan perwakilan PIV yang menunjukkan minat pada pekerjaan ini, yang menghasilkan penandatanganan awal tahun 1988 dari "Protokol tentang niat. "
Pada tahun 1988, produksi suku cadang prototipe dimulai. Menurut rencana, pekerjaan itu seharusnya selesai pada tahun 1992, tetapi pada tahap ini pekerjaan berjalan sangat lambat, praktis berhenti beberapa kali, sehingga prototipe akhirnya dirakit hanya pada tahun 1995. Kami akan kembali ke ini sedikit lebih rendah.
Sistem kontrol transmisi
Sebagai sistem kontrol, sistem hidrolik murni awalnya diasumsikan, dengan "logika" hidrolik, tabung pitot, dll.
Tetapi bahkan sistem kontrol yang "paling sederhana" itu tidak seperti biasanya untuk produksi mobil pada waktu itu, dan timbul masalah dengan hal ini. Namun, pada akhir 80-an, pada gelombang Perestroika, banyak koperasi dan perusahaan kecil, termasuk perusahaan penelitian dan produksi, yang dengan senang hati mengambil pekerjaan seperti itu, muncul atas dasar perusahaan pertahanan.
Dalam hal ini, sebuah perusahaan kecil yang dibentuk atas dasar TsIAM diambil untuk desain.
Sistem elektro-hidrolik dengan logika elektronik diusulkan, yang memungkinkan untuk menggunakan katup serial dan elemen elektronik yang digunakan untuk sistem tenaga dan kontrol mesin pesawat terbang.
Sistem kontrol adalah pelat terpisah yang dipasang di jendela di bagian bawah transmisi.
Foto menunjukkan tempat memasang pelat kontrol, dengan saluran untuk mengontrol hidraulik daya variator dan kopling.
Bagian hidrolik dari sistem kontrol ditenagai oleh pompa roda gigi yang digerakkan oleh mesin. Sistem sirkulasi minyak bah semi-kering digunakan, pompa kedua (tekanan rendah) digunakan untuk ini, memompa minyak dari wadah CVT ke wadah transmisi utama melalui filter kasar dan halus.
Pekerjaan dimulai pada tahun 1988, dan pada tahun 1992 sebuah prototipe dibuat
di sebuah pabrik di sebuah perusahaan kecil di pabrik penerbangan - subkontraktor TsIAM.
Sayangnya, pada saat ini sampel transmisi belum dibuat, sehingga "pernikahan" sistem kontrol transmisi tertunda sepanjang waktu. Pada akhirnya, bisnis kecil bubar, dan sistem kontrol prototipe hilang.
Algoritma kontrol
Sistem kontrol harus mengontrol transmisi sesuai dengan algoritma yang ditetapkan di dalamnya.
Salah satu tugas utama dari transmisi mobil adalah untuk memastikan bahwa mesin beroperasi dalam mode optimal untuknya dalam kondisi mengemudi kendaraan apa pun dengan memilih transmisi yang optimal (dalam hal transmisi bertahap) atau rasio gigi variabel yang terus menerus (dalam kasus variator).
Akibatnya, mesin pada beban apa pun harus beroperasi dengan konsumsi bahan bakar minimum untuk beban yang diberikan. *
- Tentu saja, selain konsumsi spesifik, parameter lain harus diperhitungkan, misalnya, toksisitas, keausan mesin, kebisingan, respons throttle, dll.
Ini dapat divisualisasikan pada karakteristik multi-parameter mesin.
Di atasnya, sumbu absis menunjukkan kecepatan putaran poros engkol mesin, dan torsi ordinat * pada sumbu ordinat, di samping itu, hiperbola daya konstan ditampilkan, dan konsumsi bahan bakar spesifik per unit daya (gram / kW * h) ditunjukkan dari warna dari minimum (hijau) ke maksimum (merah).
- Dalam hal ini, karakteristik multi-parameter relatif diambil, di mana kecepatan mesin dan torsi ditampilkan relatif terhadap nilai maksimumnya.
Dapat dilihat bahwa konsumsi spesifik minimum berada di zona tersebut dari sekitar 50% hingga 80% dari torsi maksimum dalam rentang tenaga dan kecepatan engine yang cukup luas.
Anda mungkin memperhatikan bahwa bahkan dengan tenaga mesin yang rendah, diinginkan bahwa torsinya cukup besar, dan kecepatannya minimal. Ketika tenaga meningkat, kecepatan mesin juga harus meningkat, dan torsi optimal dalam hal ini berubah sangat sedikit. Nah, dengan daya maksimum, tidak ada yang bisa dipilih, tidak ada waktu untuk dihemat, jadi beban dan kecepatannya maksimum.
Dalam hal gearbox manual, pengemudi sendiri memilih gigi yang diinginkan, menyesuaikan beban dengan pedal gas. Misalnya, dengan akselerasi intensif atau mengemudi di jalan naik atau turun, ini mungkin gigi kedua, dan dengan gerakan diam di SPEED SAMA, gigi kelima mungkin sudah dipilih.
Dalam hal transmisi otomatis, pengemudi menetapkan mode operasi dengan pedal gas, dan kotak itu sendiri memilih gigi yang diinginkan.
Nah, dalam kasus variator, rasio gigi berubah secara bertahap, memungkinkan mesin bekerja pada mode optimal untuk beban tertentu, tergantung pada posisi pedal gas.
Sekilas, mungkin terlihat bahwa algoritma untuk mengendalikan transmisi variabel kontinu lebih sederhana daripada transmisi otomatis stepped, tetapi ini tidak sepenuhnya benar.
Mereka yang mengendarai mobil tahun 80-an dengan CVT (misalnya, Ford Fiesta atau Fiat Uno) mungkin telah memperhatikan bahwa setelah memindahkan rintangan (bump, bump atau curb), mesin “melolong” untuk beberapa waktu (kecepatan berfluktuasi terasa). Faktanya adalah bahwa hambatan menyebabkan peningkatan tajam dalam beban, karena sistem kontrol memaksa variator untuk meningkatkan rasio roda gigi, maka beban berkurang, rasio roda gigi variator juga berkurang, akibatnya terjadi osilasi.
Fitur lain yang tidak menyenangkan dari mobil-mobil ini adalah perasaan "gagal kopling" ketika pedal gas ditekan tajam, misalnya, ketika menyalip. Sistem kontrol menerima sinyal tentang perlunya peningkatan signifikan dalam kecepatan engine, dan mencoba untuk dengan cepat meningkatkan rasio roda gigi variator untuk mempercepatnya. Sebagai hasil dari akselerasi mesin yang begitu cepat, semua torsi dihabiskan untuk melepas roda gila sendiri (hampir sama seperti ketika Anda menekan pedal gas pada netral dengan tajam). Tentu saja, setelah setengah detik, mesin akan mencapai mode yang diinginkan, dan mobil akan berakselerasi secara intensif, tetapi selama waktu ini pengemudi akan memiliki waktu untuk mendapatkan emosi negatif.
Jika Anda hanya "menumpulkan" sistem kontrol, memperlambat reaksinya, maka mobil akan mulai "berpikir" terlalu lancar dengan pedal gas, yang juga tidak diinginkan.
Pada prinsipnya, masalah-masalah ini dapat dihindari jika algoritma kontrol variator tidak hanya merespons kecepatan rotasi poros engkol, tetapi juga turunannya yang pertama, dan lebih disukai kedua, (percepatan kecepatan rotasi dan percepatan akselerasi).
Dalam hal ini, variator dan mesin tidak akan begitu "gugup" bereaksi terhadap perubahan mendadak pada beban dan operasi intensif dari pedal gas, dan pada saat yang sama akan "sensitif" untuk memantau fluktuasi beban kecil dan sedikit gerakan pedal gas.
Tentu saja, dengan sistem kontrol digital saat ini, ini adalah tugas yang mudah dipecahkan, oleh karena itu, pada mobil modern dengan CVT, kerugian yang disebutkan di atas secara praktis diberantas.
Namun, pada akhir 80-an dalam transmisi dengan logika elektronik hidrolik dan bahkan lebih maju, ini sangat sulit untuk diterapkan.
Dalam transmisi yang sedang dipertimbangkan, dokter ilmu teknik yang diusulkan pada akhir 50-an digunakan V.A. Algoritma kontrol asli Petrov tanpa kekurangan ini.
Selain itu, sebagai "sinyal referensi" untuk mengendalikan rasio roda gigi dari variator, itu bukan kecepatan mesin yang digunakan, tetapi torsi diukur segera setelah roda gila (dalam hal ini, ini adalah reservasi penting!).
Tentu saja, untuk ini perlu memiliki sensor torsi, tetapi dalam hal ini awalnya diletakkan untuk mengatur tekanan dalam silinder hidrolik katrol tergantung pada torsi yang sama.
Torsi diukur dengan sudut rotasi poros input transmisi yang cukup panjang (lihat diagram di awal artikel).
Untuk tujuan ini, dua sensor Hall digunakan pada pelek roda gigi di dekat ujung depan dan belakang poros input, berdasarkan pada perbedaan fasa di mana torsi dapat dihitung. Nah, salah satu sensor Hall ini juga berfungsi untuk mengukur kecepatan mesin.
Sertifikat hak cipta untuk penemuan ini dikeluarkan untuk algoritma kontrol variator ini.
Selain itu, beberapa sertifikat Hak Cipta lainnya dan Paten untuk penemuan juga diperoleh untuk solusi teknis lainnya.
Epilog (epitaf)
Sayangnya, saat pembuatan prototipe transmisi variabel terus menerus hampir bertepatan dengan naiknya kekuasaan di AZLK Direktur Jenderal Ruben Astaryan, di mana penderitaan pabrik dimulai. Dalam kondisi seperti itu, tidak mungkin untuk melakukan tes normal, belum lagi pengembangan produksi. Nah, setelah beberapa tahun, pabrik mobil itu sendiri akhirnya bangkrut.Namun, "ini adalah kisah yang sama sekali berbeda", sedih dan sangat sedih ...
PS: Foto dalam resolusi lebih tinggi dapat dilihat di album foto saya
PPSSaya mencoba menulis artikel ini untuk waktu yang sangat lama, tetapi karena beberapa alasan subyektif, itu tidak berhasil sama sekali. Pada akhirnya, saya menyadari bahwa jika saya tidak menerbitkannya sekarang, maka saya tidak akan pernah menulis. Saya minta maaf untuk beberapa kebingungan, biasanya saya menulis lebih mudah. Jika topik ini menarik, maka mungkin akan ada kelanjutan.
Mengudara di “Echo of Moscow” dalam program Sergey Aslanyan “Garage” [31/07/2018]