Pertama, saya menulis pengantar panjang dari mana tugas itu berasal, dan kemudian terasa membosankan bagi saya dan saya menghapusnya.
Jadi, tugasnya: membuat UAV otonom untuk memantau status saluran listrik (power lines).
Sejak:
- ini adalah proyek hobi dan saya bisa membuat kesalahan besar dalam perhitungan saya
- benda terbang menimbulkan bahaya bagi makhluk hidup dan harta benda mereka,
maka artikel ini harus diambil hanya sebagai cakrawala yang meluas, dan bukan panduan untuk bertindak.
Daftar cacat untuk deteksi pada saluran listrik.
Persyaratan UAV
- Lepas landas dan mendarat vertikal (tanpa ketapel dan parasut), yaitu copter
- Mampu lepas landas, terbang di titik tertentu, kembali dan mendarat secara otomatis
- Anda dapat mengedit misi penerbangan, memberikan perintah untuk lepas landas dan mendarat dari mana saja di dunia
- Siarkan telemetri dan video real-time melalui Internet
- Mengunggah foto dan video dari kamera ke server selama atau setelah penerbangan
- Isi daya atau ganti baterai secara mekanis tanpa campur tangan manusia.
Dan juga dua persyaratan yang saling bertentangan:
- Elektronik yang andal (jika jatuh di suatu tempat, anggap hilang)
- Biaya percobaan yang relatif rendah (jika jatuh di suatu tempat, anggap hilang)
Tingkat otonomi, idealnya, fantastis: drone terbang sepanjang rute yang telah direncanakan, mengunggah foto ke server, perangkat lunak pada server mengidentifikasi cacat pada foto dan membentuk permintaan kepada tim perbaikan dengan koordinat lokasi kerja. Drone itu sendiri seharusnya tidak memerlukan perhatian seseorang sebelum akhir masa kerja bagian mana pun, misalnya baterai atau bantalan.
Jelas bahwa tugas ini bukan untuk satu tahun, tetapi saya akan mulai, dan mungkin seseorang akan mengambil dan melanjutkan.
Sebagai contoh, versi industri dari kompleks otonom:
satu ,
dua ,
tiga ,
empat ,
lima ,
enam ,
tujuh ,
delapan ,
sembilan ,
sepuluh ,
sebelas ,
dua belas ,
tiga belas ,
empat belas . Saya menulis permintaan kepada semua orang sebagai pembeli potensial untuk mengetahui harga. Dari mereka siap dijual: 2; siap dijual di Rusia: 0.
Memilih pengontrol penerbangan
Karena saya perlu menyiarkan video dan telemetri melalui Internet, segera terlintas di benak saya untuk meletakkan komputer mikro dengan modem 4G dan kamera pada drone dan membuat webcast dari kit ini. Solusi semacam itu ditemukan:
satu ,
dua ,
tiga . Ini adalah papan biasa dengan modem USB 4G eksternal dan kamera. Untuk pengkodean dan penyiaran video,
gstreamer digunakan. Tetapi hal-hal ini sendiri tidak tahu bagaimana mengendalikan drone, mereka perlu digunakan bersama dengan pengendali penerbangan.
Pengendali penerbangan adalah otak drone. Ini memonitor status sensor posisi (giroskop, akselerometer, kompas), koordinat GPS, posisi pegangan pada panel kontrol dan, berdasarkan data ini, mengontrol motor untuk menggantung pada satu titik atau terbang di suatu tempat. Pengontrol penerbangan harus entah bagaimana terhubung dengan komputer on-board sehingga Anda dapat memuat tugas penerbangan atau menunjukkan titik sewenang-wenang tempat terbang dan kapan harus menyalakan kamera.
Pada penjualan Anda dapat menemukan banyak pengontrol berbeda yang sangat berbeda satu sama lain dalam harga dan fungsionalitas. Beberapa dari mereka bekerja pada perangkat lunak mereka sendiri, dan beberapa menggunakan perangkat lunak sumber terbuka, seperti
Ardupilot dan garpu
PX4-nya .
Dengan Ardupilot, saya bermain di
8-bit atmegs yang tidak memiliki bootloader USB, tetapi mereka dijahit pada programmer. Sejak saat itu saya belum bertemu dengannya dan terkejut ketika saya mengetahui bahwa sekarang dia dapat bekerja pada komputer Linux 64-bit, dia memiliki komunitas pengguna yang sangat besar, baik hobi maupun pro, daftar panjang sensor yang didukung di luar kotak dan dicat.
rencana untuk 2018-2019 . Selama waktu ini, ia berhasil tumbuh menjadi proyek
DroneCode , dan kemudian
memutuskan hubungan dengannya.
Pada pandangan pertama, itu hanya menerapkan semua fungsi yang diperlukan: lepas landas dan mendarat otomatis, memuat tugas penerbangan, ada aplikasi desktop dan seluler untuk semua keluarga OS utama. Program Manajemen (GCS - Station Ground Control) berkomunikasi dengan pesan singkat atas kapal controller melalui open
protocol MAVLink melalui kit radio (drone mengirimkan telemetri, GCS mengirimkan perintah kontrol). Saya menduga bahwa pesan-pesan ini dapat diluncurkan melalui Internet.
Lihatlah
daftar pengontrol yang didukung dan ambil sesuatu. Ada selusin pilihan di sana, dari yang kecil hingga besar dan dengan karakteristik yang berbeda.
Dari semua variasi pengontrol, saya menyukai beberapa opsi:
| Pengontrol penerbangan | Erle PXFMini | Emlid edge | Navio 2 | Erle Brain 3 | PixHawk 2 Cube |
| Komputer tambahan | Raspberry Pi Zero W | tidak | Raspberry pi 3 | tidak | Raspberry pi 3 |
| | | | | |
| Atur berat badan, g | 84 | 97 | 98 | 145 | 150 |
| CPU, total | 1 | 2 | 2 | 1 | 3 |
| OS berjalan secara bersamaan | 1 | 1 | 1 | 1 | 2 |
| Sensor IMU, kit | 1 | 2 | 2 | 1 | 3 |
| Sensor tekanan udara | 1 | 2 | 1 | 1 | 1 |
| Redundansi daya | tidak | 2x | 3x | tidak | 2x |
| GPS, Glonass | modul eksternal
dengan magnetometer tambahan | modul eksternal
dengan magnetometer tambahan | penerima internal, antena eksternal | modul eksternal
dengan magnetometer tambahan | modul eksternal |
| Input video | CSI di Raspberry | HDMI | CSI di Raspberry | CSI | CSI di Raspberry |
| WiFi | ada disana | ada disana
Jarak jauh 2 km
+52 g | ada disana | ada disana | ada disana |
| | | | | |
| Biaya kit, $ | 212 | 700 | 215 | 341 | 331 |
Kit paling ringan (84 g) diperoleh dari mikrokomputer
Raspberry Pi Zero W (9 g), pengontrol
Erle PXFMini (15 g), modul GNSS eksternal asli (46 g) dan
hub USB tambahan (14 g).

Hanya ada satu prosesor yang berfungsi dalam kit ini - pada Raspberry Pi. Di atasnya tergantung kontrol PWM dari regulator motor, pembacaan sensor sensor, OS Linux dengan semua nyali dan decoding video dari kamera. Karena Pi Zero tidak memiliki port USB, dalam opsi ini Anda harus menggunakan hub eksternal. Sensor IMU dan input daya tanpa redundansi.
Set berikutnya (97 g) dari perusahaan Hong Kong dengan nama Rusia di tim pengembangan adalah
pengontrol Emlid Edge (59 g) dengan modul GNSS (38 g). Modul GNSS beroperasi sesuai dengan protokol
UAVCAN dan juga dilengkapi dengan magnetometer dan sensor tekanan udara. Di sini, prosesor ARM Cortex-M3 yang terpisah bertanggung jawab untuk PWM, OS Linux berputar pada quad-core ARM Cortex-A53 utama.

Pengontrol memiliki input video HDMI, yang memungkinkan Anda untuk terhubung langsung ke kamera apa pun dengan output seperti itu, misalnya GoPro 4 atau 5. Biaya yang relatif tinggi dijelaskan oleh transceiver wifi jarak jauh dalam kit (hingga 2 km dengan siaran video HD). Berat modul on-board (52 g) tidak termasuk dalam tabel umum, karena saya memerlukan komunikasi 4G, namun, Anda dapat mengingat opsi ini: dari wifi jarak jauh Anda dapat membuat saluran komunikasi cadangan melalui router stasioner dengan Internet kabel.
Opsi berikutnya (98 g) terdiri dari mikrokomputer
Raspberry Pi 3 (45 g) yang terkenal dengan pengontrol pelindung
Navio 2 (23 g) dari Emlid yang sama dan antena GNSS eksternal (30 g). Pengontrol memiliki prosesor Cortex-M3 yang terpisah untuk mengendalikan PWM pada 14 saluran dan mendekripsi sinyal SBUS dan PPM yang masuk dari penerima. Itu, pada gilirannya, dikendalikan melalui driver di kernel Linux, yang berjalan pada Raspberry.

Pengontrol ini dilengkapi dengan sepasang sensor IMU terpisah (akselerometer, giroskop, magnetometer) MPU9250 dan LSM9DS1, satu sensor tekanan udara dan modul GNSS
NEO-M8N U-blox , yang melihat GPS, Glonass dan BeiDou dengan antena eksternal melalui konektor MCX.
Anda dapat menyalakan "pai" ini dari 5 volt secara bersamaan dari tiga sisi, yang berfungsi sebagai sumber independen yang saling menduplikasi: konektor daya utama pada tameng, output servo PWM, mikro-USB pada Raspberry.
Pengontrol
Erle Brain 3 (100 g) dengan modul GPS eksternal (45 g) berdasarkan berat, harga, dan serangkaian sensor terlihat di tabel sehingga saya bahkan tidak akan memasukkan foto di sini.
Selanjutnya, kami memiliki kit paling andal dan terberat (150 g), yang terdiri dari pengontrol penerbangan
PixHawk 2 Cube (80 g) yang populer dengan arsitektur terbuka dan komputer Raspberry Pi 3. Sebagai ganti Raspberry dalam kasus ini, Anda dapat menggunakan papan tunggal ringan, misalnya,
Odroid XU4 ,
NVIDIA Jetson atau lainnya dengan antarmuka yang tepat dan bobot yang tepat.

Dalam CPU 2 PixHawk didirikan: pertama 32-bit STM32F427 Cortex M4 - utama yang menjalankan sistem operasi real time (RTOS)
NuttX dan cadangan kedua (failsafe) 32-bit STM32F103. Pengontrol dibuat dalam bentuk modul: prosesor dan sensor IMU dipasang di dalam kubus (pada dudukan anti-getaran, dan bahkan dengan pemanasan), dan daya serta konektor ke seluruh periferal dibawa ke pangkalan. Diasumsikan bahwa dasar-dasarnya dapat berbeda dan setiap orang dapat mengembangkan sendiri untuk memenuhi persyaratan spesifik, di mana Anda kemudian dapat meletakkan kubus jadi. Omong-omong, ada versi yang sudah jadi dengan konektor untuk menginstal mikrokomputer
Intel Edison . Tetapi, karena Intel tidak lagi merilis komputer ini, Raspberry juga akan berada dalam kit ini sebagai komputer di komputer.
Raspberry digunakan sebagai komputer tambahan untuk terhubung ke Internet dan Anda dapat menjalankan tugas intensif sumber daya apa pun di atasnya (misalnya, pengenalan pola di OpenCV), tanpa rasa takut bahwa kegagalan dalam proses ini akan "menimbang" fungsi-fungsi penting, seperti kontrol motor.
Jadi, mengingat bobot, spesifikasi dan harga, tempat pertama bagi saya adalah Navio 2 + Raspberry kit, dan Pixhawk 2 Cube + Raspberry (+52 g) kedua. Sekarang, jika di bawah Pixhawk ada dasar pada konektor untuk Raspberry Zero kecil, dan bahkan output USB, itu akan lebih menarik. Tapi Anda masih belum bisa membelinya, tetapi belum menarik untuk membuatnya.
Saya akan menulis dalam catatan bahwa peningkatan keandalan menambah biaya 52 gram dan $ 110. Menurut hasil total perhitungan, angka-angka ini mungkin menjadi tidak signifikan.
Pengisian otonom
Seperti yang dapat Anda lihat di versi selesai di atas, ada beberapa pendekatan untuk mempersiapkan drone otonom untuk penerbangan berikutnya: pengisian baterai melalui bantalan kontak, pengisian induksi non-kontak dan penggantian baterai mekanis dengan pengisian berikutnya di stasiun.
Setiap metode memiliki pro dan kontra, saya akan menulis tentang mereka secara terpisah, tetapi dalam hal apa pun, agar berfungsi, drone harus dapat mendarat pada titik yang diinginkan dengan akurasi hampir sentimeter.
Mendarat "ke titik"
Untuk pendaratan yang tepat, Anda dapat menggunakan kamera komputer on-board standar, spidol visual, dan OpenCV untuk mengenalinya. Berikut ini
salah satu solusi yang bisa Anda lakukan google.
Satu lagi yang segar muncul ketika saya menulis artikel ini. Tetapi pengenalan pola adalah proses yang agak memakan waktu untuk Raspberry, dan Anda tidak ingin mengunduhnya tanpa kebutuhan khusus. Selain itu, kualitas pengakuan akan sangat tergantung pada bahan penanda dibuat dan kondisi pencahayaan. Diinginkan bahwa ini menjadi sensor terpisah dan memberikan koordinat siap pakai ke titik visual yang diinginkan, terlepas dari keberadaan dan sudut datangnya cahaya. Dan itu ada dalam daftar peralatan Ardupilot yang didukung, disebut
IR-Lock .
 Airobotik
Airobotik dari daftar di atas juga menggunakan solusi ini. Ini didasarkan pada
modul kamera open source
Pixy CMUcam5 . Modul ini dilengkapi dengan kamera dan prosesor, dan dapat "diajarkan" untuk mengenali gambar tertentu dari objek, dan kemudian, pada output, dapatkan koordinat siap pakai dari objek-objek ini dalam gambar.
Mengetahui koordinat gambar yang dikenali pada gambar dan jarak ke sana, pengendali penerbangan menghitung seberapa jauh dan ke arah mana drone perlu dipindahkan.
Modifikasi IR-Lock terdiri dari fakta bahwa
senter IR dari LED digunakan sebagai penanda untuk dikenali, dan pada kamera, lensa konvensional diganti oleh lensa yang hanya memancarkan cahaya IR. Akibatnya, dalam cahaya apa pun, kamera melihat pendaran lampu putih di latar belakang hitam (dan tidak lebih), yang sangat meningkatkan akurasi pengenalan.
Untuk pengoperasian normal sensor ini,
pengintai juga diperlukan, yang akan mengukur ketinggian di atas tanah. Para pengembang merekomendasikan menggunakan pengintai laser, misalnya
LightWare LW20 (20 gram dan $ 299, berukuran hingga 100 m), atau
VL53L0X yang murah dan pendek (kurang dari 1 gram dan $ 10, berukuran hingga 2 m), yang telah
didukung dalam versi terbaru Ardupilot. Untuk beberapa alasan, sensor ultrasonik untuk tujuan pendaratan tidak layak mendapat kepercayaan dari pengembang IR-Lock.
Omong-omong, drone DJI mendarat secara otomatis menggunakan kamera ultrasonik dan stereo.
Gantung seperti orang mati
Agar drone menggantung di satu tempat dan tidak "berenang," GPS saja tidak cukup. Sayangnya, karena suasananya, koordinat dari penerima GPS dapat mengambang dalam jarak puluhan meter, dan sistem koreksi
GPS RTK harus digunakan untuk akurasi sentimeter. Sistem ini menggunakan stasiun stasioner berbasis darat sebagai standar untuk mengoordinasikan penyimpangan, dan komunikasi radio dengan dewan untuk mengirim nilai-nilai penyimpangan ini di sana. Hal seperti itu diperlukan untuk memotret rencana fotografi, diikuti dengan menempelkannya ke kartu besar, dan untuk tujuan menggantung di tempat, saya akan membatasi diri pada sensor optik
PX4Flow untuk
saat ini .
Ia bekerja dengan prinsip yang sama dengan mouse optik. Tidak seperti IR-Lock, ia tidak mengenali gambar tertentu dan di Ardupilot mereka bekerja dalam mode penerbangan yang berbeda. Gambar kamera dianalisis pada offset 400 kali per detik, dan nilai offset yang dihitung dapat dibaca oleh pengontrol menggunakan protokol I2C. Sensor (
perangkat keras terbuka ) memiliki berat 15 gram dan memiliki semua yang Anda butuhkan di papan Anda: CPU Cortex M4F 168 MHz (128 + 64 KB RAM), sensor optik 752 × 480 MT9V034 dan giroskop 3-sumbu L3GD20. Untuk pengoperasian normal, disarankan juga menggunakan pengintai laser, bukan ultrasonik. Meskipun modul itu sendiri menyediakan konektor hanya untuk sensor ultrasonik.
Perangkat Elektronik Minimum
Inilah yang dikumpulkan:
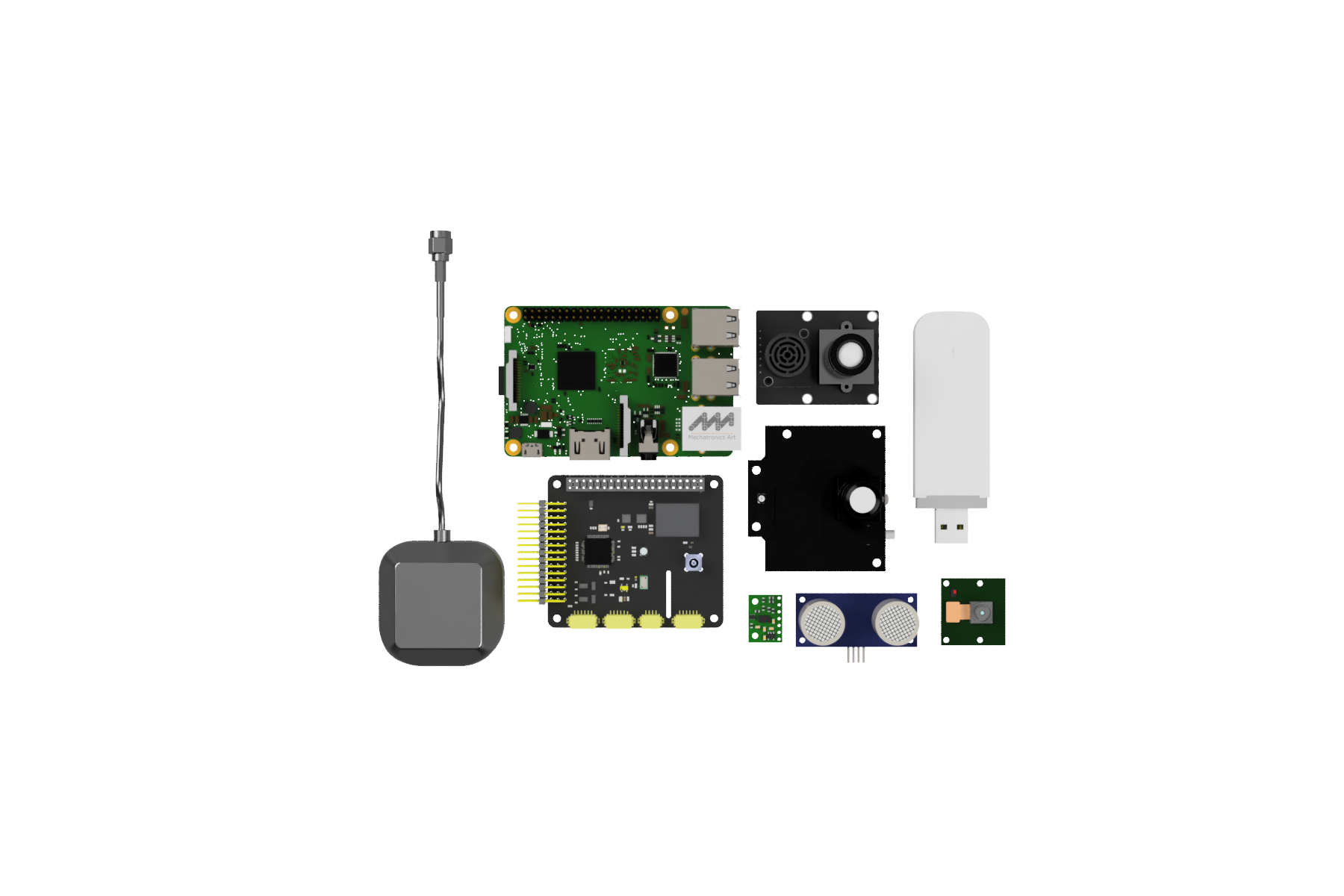
Berat totalnya adalah 199 g. Semua komponen bekerja dari 5 Volt dan mengonsumsi hampir 2 Ampere (10 Watt) dalam mode siaran video.
Kit ini berisi sensor jarak ultrasonik yang akan melihat ke depan pada subjek hambatan. Saya meninggalkan penglihatan stereo dan sitar melingkar untuk nanti, jika ada kebutuhan nyata di dalamnya.
Muatan
Karena kamera asli dari Raspberry mengambil foto yang rata-rata dalam kualitas, dan juga tidak tahu cara mengambil foto pada saat yang sama dengan video, itu akan digunakan hanya untuk webcasting, dan sebagai kamera utama Anda memerlukan yang cocok untuk mendeteksi cacat pada saluran listrik.
GoPro Hero 5 Session ,
Sequoia Parrot multispektral, dual
Sentera Double 4K dan infrared
FLIR Vue Pro cocok untuk sebagian besar item dari daftar cacat yang terdeteksi. Masing-masing beratnya sekitar 100 g.
Untuk menstabilkan kamera untuk meningkatkan kualitas gambar, suspensi aksial 2 atau 3 akan terbang ke beban dengannya.

Suspensi 3-sumbu
sederhana memiliki berat sekitar 160 g dan ditenagai oleh 12 volt, memiliki arus kerja pada tegangan ini sekitar 50 mA dan arus maksimum 700 mA ketika motor macet.
Nutrisi
Untuk memberi daya pada semua elektronik, diperlukan 5 Volts (minimum 2,2 Ampere) dan 12 Volt (minimum 1 Ampere). Mengingat kekuatan cadangan pengontrol penerbangan, Anda memerlukan dua sumber independen 5 volt. Membuat daya sistem dapat modul terpisah dari nominal yang cocok atau menemukan siap "3 in 1", misalnya
seorang (24 g, tegangan input max untuk 28 volt pada 3A output).
Sensor saat ini (22 g) akan dihubungkan ke sana sehingga dimungkinkan untuk mengukur konsumsi mAh pada baterai.
Perangkat elektronik + kamera + suspensi + sistem daya berbobot 505 g.
Motor dan Baling-Baling
Pada banyak drone profesional, saya melihat motor dan baling-baling
T-Motor . Ternyata tidak santai. Dalam dokumentasi Ardupilot, mereka juga
direkomendasikan sebagai sistem penggerak untuk drone profesional. Karena itu, kami akan mencari motor yang cocok untuk mereka.
Agar drone dapat terbang dalam waktu yang lama, motor dengan efisiensi maksimum diperlukan. Efisiensi bundel motor dan baling-baling diukur dengan jumlah dorong dalam gram per 1 Watt energi yang dikonsumsi.
Untuk mengetahui motor mana yang paling cocok, Anda perlu mengetahui berat total drone yang dirakit penuh, dengan mempertimbangkan kerangka, baterai dan motor itu sendiri dengan sekrup. Baterai diperlukan agar bisa bertahan selama 30 menit. Bingkai diperlukan agar semuanya pas dan sekrup tidak menyentuh apa pun.
Terlalu banyak yang tidak diketahui, jadi saya akan menggunakan
kalkulator online
untuk quadcopters E-calc .
Setelah bermain di kalkulator, saya memilih
motor Antigravity 4004 KV300 (53 g) dengan sekrup
15x5 (27 g). Dalam mode optimal, dengan tegangan suplai 24 Volt, kit semacam itu menarik 474 gram pada arus 1,4 A. Efisiensinya adalah 14,11 g / W, rasio traksi dengan bobot mati = 5,9: 1. Pada kecepatan penuh, daya dorong adalah 1311 gram pada arus 7,5 A. Helikopter akan dengan empat motor, yaitu, quad. Berat take-off optimal = (474 g * 4 motor) = 1896 g, maksimum (dengan mempertimbangkan rasio dorong-berat 2: 1) = (1311 g * 4 motor) / 2 = 2622 g.
Motor dikontrol oleh pengontrol kecepatan. Tegangan catu daya motor = 24 Volt, arus operasi maksimum = 7,5 A, jadi Anda memerlukan regulator untuk tegangan ini dan dengan arus kerja, dengan mempertimbangkan margin, setidaknya 10A. T-Motor memiliki regulator teringan (7 g tanpa kabel) untuk tegangan ini - itu adalah
FPV 35A-32bit 3-6S . Itu dibuat atas dasar firmware
BLHeli-32 yang populer, dengan kode tertutup, tetapi dengan pengaturan lebar dan sejumlah
besar analog .
Subtotal:VMG (grup baling-baling), yang terdiri dari motor, baling-baling, dan regulator (masing-masing 4 pcs) memiliki berat 346 g.
Bersama-sama dengan elektronik dan muatan (346 + 505), 851 g diperoleh.Mempertimbangkan pengencang, kabel dan konektor (mari kita perkirakan +100 g) = 951 g.
Dengan bobot optimal, bingkai dan baterai tetap (1896 - 951) = 945 g. Dengan maksimum (2622 - 951) = 1671 g.
Bingkai
Kami menghitung ukuran bingkai minimum sehingga baling-baling 15 inci yang dipilih tidak saling mengganggu untuk membuat traksi. Dimensi produsen rangka menunjukkan jarak antara sumbu motor yang terletak diagonal satu sama lain.
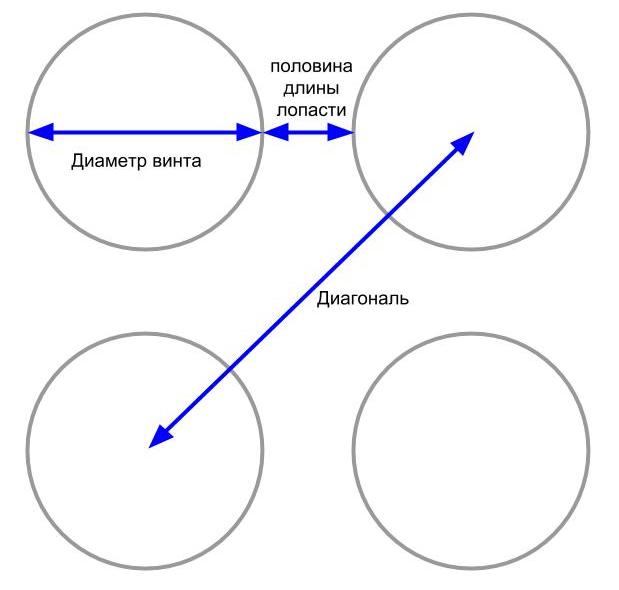
Dari gambar ini Anda dapat menemukan sisi miring, yang dihitung dari kaki, sama dengan jumlah diameter sekrup dan jarak antara baling-baling. Baling-baling baling 15 inci yang berdekatan akan berputar 1 milimeter terpisah pada bingkai diagonal 540 mm. Tambahkan sedikit ruang dan ukuran bingkai yang cocok akan menjadi sekitar 600-700 mm.
Anda dapat menemukan banyak yang dijual, misalnya, sekali : 600mm dan 750g, dua : 650mm dan 450g, tiga : 690 dan 675g, empat : 650mm dan 750g. Semuanya dibedakan berdasarkan kinerja dan kehadiran elemen lipat (sasis, balok) untuk kemudahan transportasi.Saya akan menunda pemilihan contoh spesifik untuk kebutuhan saya, untuk perhitungan lebih lanjut saya akan mengingat berat frame 450 g.Masih ada baterai dengan berat 495 g untuk berat optimal dan 1221 g untuk maksimum.Baterai
Untuk memilih baterai, Anda perlu tahu apa yang harus diberikannya saat ini.Pada kecepatan penuh, mesin akan "memakan" 30A (7.5A * 4 motor), dan elektronik sekitar 0.45A (10 watt). Mengingat margin yang kecil, kami melengkapi arus baterai operasi minimum 35A. Untuk baterai Li-Po dengan output arus tinggi pada 30 ° C, kapasitas minimum akan menjadi 1,2 Ah (35/30), dan untuk Li-Po yang lebih ringan dan Li-Ion dengan output saat ini pada 10 ° C, kapasitas minimum adalah 3,5 Ah (35/10) .Sebagai pilihan, perakitan 6S2P dari Li-Ion Sony VTC6dengan BMS, beratnya sekitar 630 g (dengan kapasitas 6 Ah). Dengan baterai ini, drone akan memiliki berat 2031 g, yang berarti 135 g lebih optimal, tetapi masih dalam batas maksimal. Sekarang mari kita hitung berapa lama copter bisa membeku dalam kondisi ideal. Dengan berat total 2031 g, setiap motor memiliki 508 g. Mari kita lihat karakteristik motor dan temukan konsumsi saat ini dengan traksi ini. Itu akan kira-kira sama dengan 1.6A. 4 motor dan elektronik akan memberikan total 6.85A (1.6 * 4 + 0.45). Dengan mempertimbangkan debit baterai hingga 20%, itu akan berubah (6 Ah * 80% / (6,85 A)) = 0,7 jam atau 42 menit.Tata letak
 Sementara saya memilih bingkai yang tepat dan berpikir bagaimana menempatkan semuanya di atasnya dan bagaimana memperbaikinya, saya sampai pada kesimpulan bahwa akan lebih mudah untuk menggambar beberapa detail dan memesan pencetakan 3D dari plastik dan penggilingan dari karbon. Sepasang potongan besi dan perangkat keras dapat dipesan di Aliexpress.
Sementara saya memilih bingkai yang tepat dan berpikir bagaimana menempatkan semuanya di atasnya dan bagaimana memperbaikinya, saya sampai pada kesimpulan bahwa akan lebih mudah untuk menggambar beberapa detail dan memesan pencetakan 3D dari plastik dan penggilingan dari karbon. Sepasang potongan besi dan perangkat keras dapat dipesan di Aliexpress.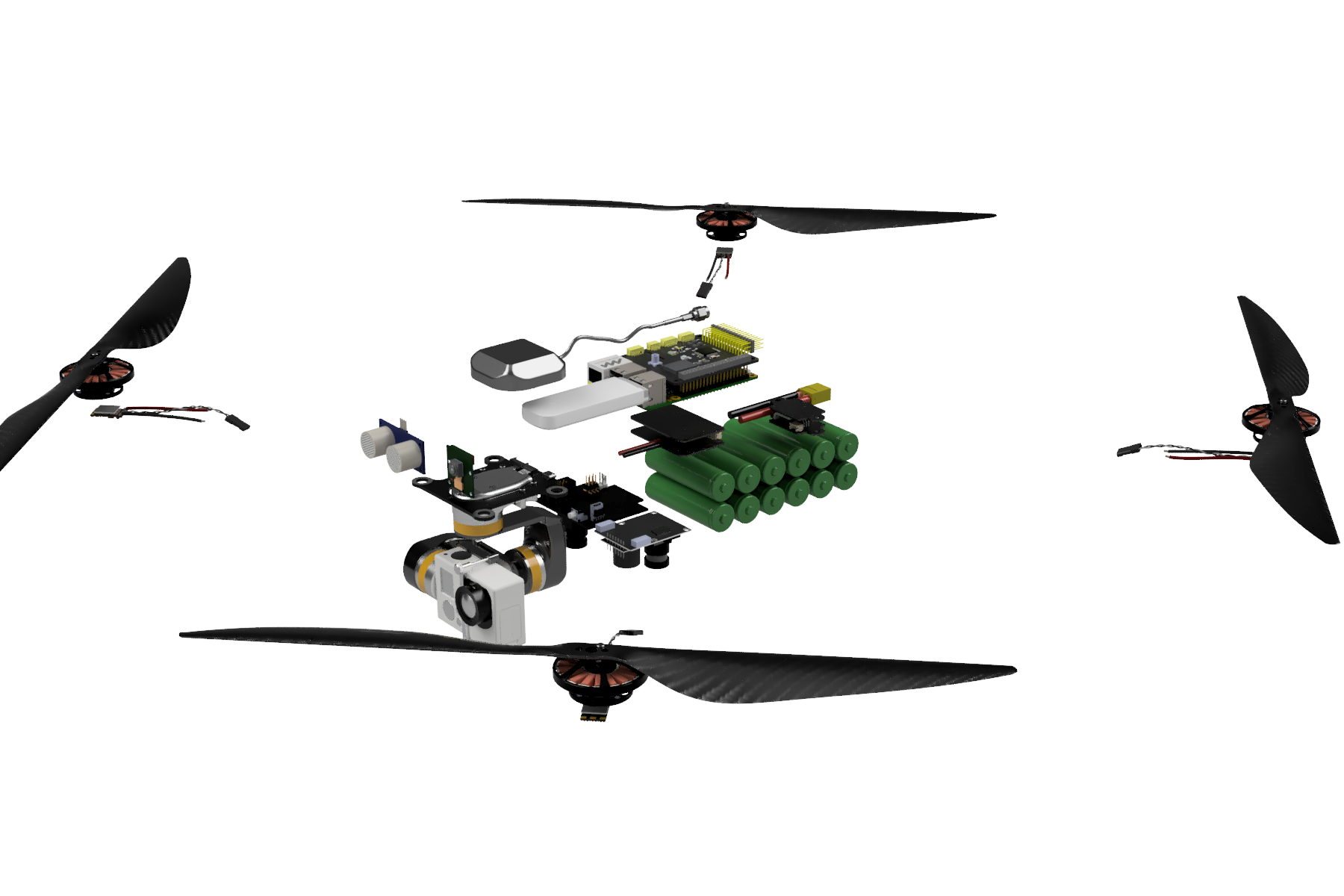 Setelah bereksperimen sedikit dengan tata letak dan pusat gravitasi, kami mendapat bingkai seperti itu:
Setelah bereksperimen sedikit dengan tata letak dan pusat gravitasi, kami mendapat bingkai seperti itu: Terdiri dari tabung dan pelat karbon, bagian yang terbuat dari aluminium dan pengencang yang terbuat dari titanium. Berat bingkai diperkirakan 350 g dengan diagonal 700 mm. Model bingkai 3D dan daftar bagian .Model yang sepenuhnya dirakit (tanpa kabel):
Terdiri dari tabung dan pelat karbon, bagian yang terbuat dari aluminium dan pengencang yang terbuat dari titanium. Berat bingkai diperkirakan 350 g dengan diagonal 700 mm. Model bingkai 3D dan daftar bagian .Model yang sepenuhnya dirakit (tanpa kabel): Berat total copter dengan elektronik, baterai Li-Ion 6S2P dan kabel harus 1931.Ya, bagi saya tampaknya juga bahwa pesawat tanpa awak itu terlalu telanjang untuk versi otonom dan hujan yang baik akan dengan mudah membasahi elektronik yang ada di kapal. Karena itu, saya menambahkan sedikit plastik:
Berat total copter dengan elektronik, baterai Li-Ion 6S2P dan kabel harus 1931.Ya, bagi saya tampaknya juga bahwa pesawat tanpa awak itu terlalu telanjang untuk versi otonom dan hujan yang baik akan dengan mudah membasahi elektronik yang ada di kapal. Karena itu, saya menambahkan sedikit plastik: 3D-model frame . Daftar detail bingkai .Perakitan model 3D . Daftar komponen .Berat kerangka kosong dengan kasing 384 g, berat total 2020 g, diperkirakan waktu gantung pada satu pengisian daya (pelepasan baterai hingga 20%): 44 menit.
3D-model frame . Daftar detail bingkai .Perakitan model 3D . Daftar komponen .Berat kerangka kosong dengan kasing 384 g, berat total 2020 g, diperkirakan waktu gantung pada satu pengisian daya (pelepasan baterai hingga 20%): 44 menit.Kotak untuk pengisian
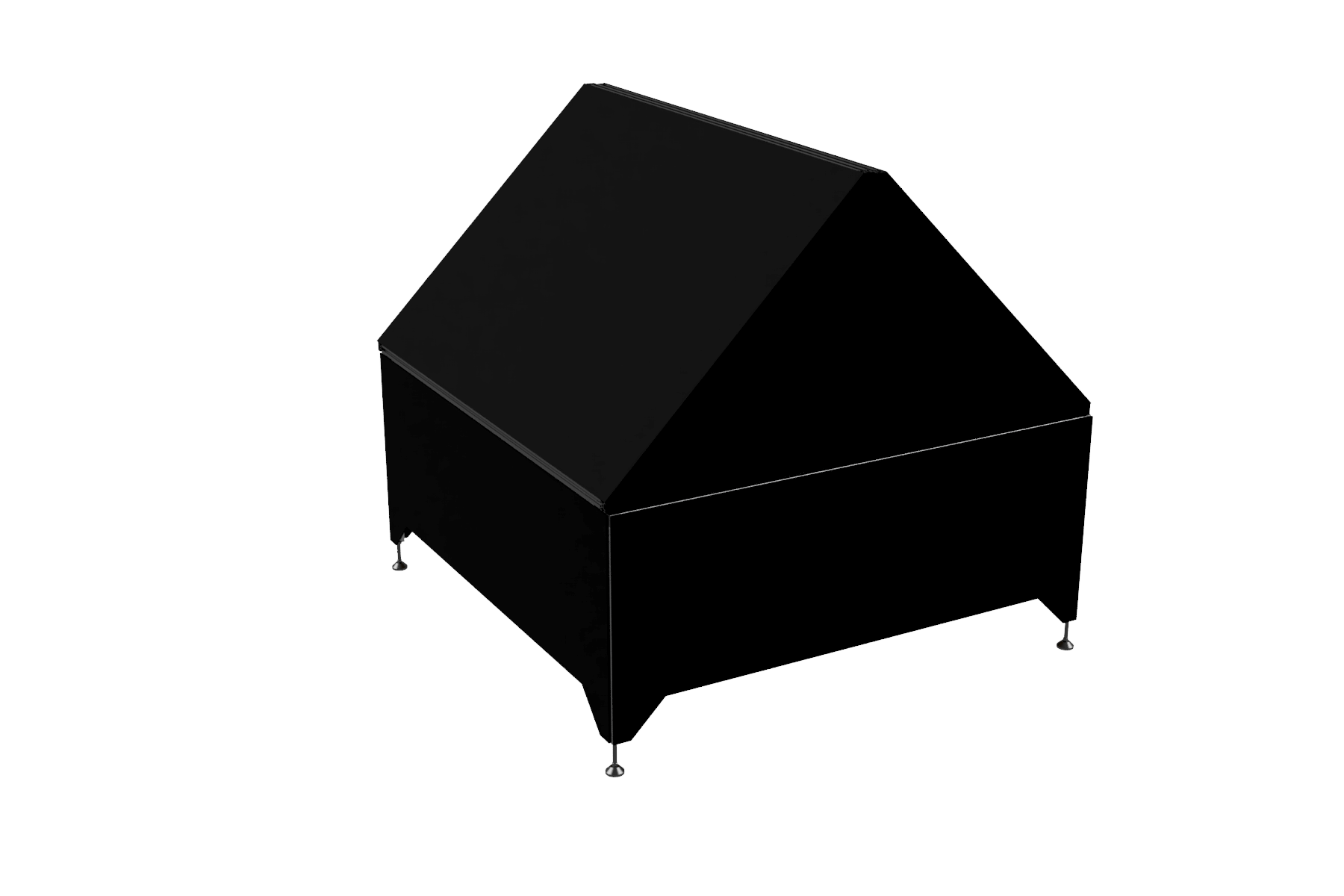
 Kotak pengisian daya akan terbuat dari profil aluminium, perangkat keras pemasangan, dan panel sandwich aluminium. Ini akan memiliki router, komputer, sensor cuaca dan kamera dengan pemandangan zona pendaratan. Saya memutuskan untuk membuat atap miring dari dua sayap sehingga pada musim dingin itu tidak menumpuk salju dan tidak akan mengganggu pembukaan. Mekanisme untuk membuka katup belum sepenuhnya dipikirkan, dan sistem pengisian belum ditentukan (saya perlu tips).
Kotak pengisian daya akan terbuat dari profil aluminium, perangkat keras pemasangan, dan panel sandwich aluminium. Ini akan memiliki router, komputer, sensor cuaca dan kamera dengan pemandangan zona pendaratan. Saya memutuskan untuk membuat atap miring dari dua sayap sehingga pada musim dingin itu tidak menumpuk salju dan tidak akan mengganggu pembukaan. Mekanisme untuk membuka katup belum sepenuhnya dipikirkan, dan sistem pengisian belum ditentukan (saya perlu tips). Pada artikel selanjutnya, saya akan memberi tahu Anda cara mengkonfigurasi dan meluncurkan drone melalui Internet menggunakan GUI atau baris perintah, tentang sistem pengisian daya yang saat ini saya pilih, perangkat lunak untuk mengendalikan pesawat dan menganalisis gambar, dan mengapa penerbangan pertama saya melalui Internet tidak bertahan lama:
Pada artikel selanjutnya, saya akan memberi tahu Anda cara mengkonfigurasi dan meluncurkan drone melalui Internet menggunakan GUI atau baris perintah, tentang sistem pengisian daya yang saat ini saya pilih, perangkat lunak untuk mengendalikan pesawat dan menganalisis gambar, dan mengapa penerbangan pertama saya melalui Internet tidak bertahan lama:
Dilanjutkan ...Bagian 2 tentang perangkat lunak.