Dalam
posting terakhir
, kita berbicara tentang proyek robotika intelektual mana yang menarik bagi Sberbank. Hari ini kita akan menganalisis cobot: sejarah, klasifikasi, bagaimana mereka dapat diperoleh atau digunakan untuk menyelesaikan masalah mereka.
 Sumber: Robot Universal
Sumber: Robot UniversalBagian 1. Apa itu cobot?
Memanggil kolaborasi robot saja tidak cukup. Itu harus memenuhi persyaratan standar internasional, yang utamanya adalah
ISO / TS 15066: 2016 (analog Amerika
ANSI / RIA TR R15.606: 2016 ). Meskipun akan lebih tepat untuk mengatakan bahwa ini bukan standar, tetapi spesifikasi teknis. Ada perbedaan: ISO terkadang mengembangkan spesifikasi teknis sebelum standar resmi final dikeluarkan. Ini adalah pengakuan atas kenyataan bahwa keadaan robotika kolaboratif saat ini dinamis dan akan berkembang seiring waktu.
Format spesifikasi teknis diperlukan untuk memperbaiki keadaan "di sini dan sekarang" agar masyarakat dapat bekerja, mengetahui bahwa akan ada perubahan di masa depan.
Menurut ISO,
cobot (kependekan dari
robot kolaboratif ) adalah robot yang dirancang untuk interaksi langsung dengan seseorang dalam ruang bersama tertentu.
Robot kolaboratif
DAPAT digunakan untuk kolaborasi (
ISO 10218 ).
Kolaborasi adalah keadaan di mana sistem robot yang dirancang khusus dan operator bekerja dalam kerangka area kerja bersama.
Ruang bersama -
ruang kerja yang dilindungi tempat robot dan seseorang dapat secara bersamaan melakukan tugas selama operasi manufaktur.
Kemungkinan besar Anda memiliki pertanyaan:
- Akankah robot menjadi kolaboratif jika saya menghapus pagar pelindung dari robot industri konvensional? Tidak
- Akankah robot menjadi kolaboratif jika saya membatasi kekuatan dan kekuatan manipulator? Tidak , karena benda tajam, bahkan dengan sedikit kekuatan, dapat menyebabkan kerusakan
- Jika robot itu kolaboratif, apakah ini berarti saya tidak perlu melakukan penilaian risiko? Penilaian risiko perlu dilakukan.
Sederhananya, ini adalah robot yang dapat melakukan tugas-tugas di ruang bersama dengan seseorang, tanpa membahayakannya, yaitu,
menemukan seseorang di area kerja seekor cobot benar-benar aman . Perbedaan cobot dari robot industri yang biasa:
- banyak dari mereka lebih murah daripada robot industri biasa: $ 24 ribu, bukan $ 40 + ribu;
- lebih mudah untuk menginstal dan mengkonfigurasi (robot berbobot sekitar 30 kg, Anda hanya perlu soket 220v, ada GUI);
- fleksibel, mudah untuk mengubahnya (antarmuka pemrograman intuitif, tidak aman bagi manusia dan lingkungan.
Sebelumnya, cara melindungi orang terdiri dari memisahkan mereka dari peralatan robot dengan perangkat pelindung fisik, misalnya sel.

 Pixabay.comControleng.com
Pixabay.comControleng.comDengan munculnya sistem robot kolaboratif, paradigma ini telah bergeser: sekarang Anda dapat bekerja sama.

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freeKenapa itu bagus?
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freeKenapa itu bagus? Karena kami mendapatkan sinergi kekuatan robot (kecepatan tinggi dan akurasi ketika melakukan operasi rutin) dan manusia (pemikiran kreatif, bekerja dalam situasi yang tidak standar). Ini meningkatkan produktivitas dalam industri, yang berarti memiliki efek positif pada perekonomian secara keseluruhan.
ISO / TS 15066: 2016 adalah spesifikasi persyaratan keselamatan pertama di dunia untuk robot kolaboratif. Dokumen ini dikembangkan oleh sebuah komite (yang mencakup para ahli dari 24 negara dan perusahaan manufaktur terkemuka) ISO sejak 2010. Ini dimaksudkan untuk melengkapi persyaratan dan rekomendasi untuk operasi bersama dari robot industri yang dijelaskan dalam ISO 10218-1 dan ISO 10218-2 ("Persyaratan keselamatan untuk robot industri"), ISO / TS 15066 menetapkan persyaratan keselamatan untuk pengoperasian bersama sistem robot industri dan kerja Rabu Dokumen ini memberikan panduan bagi mereka yang melakukan penilaian risiko ketika orang dan robot bekerja sama.
Sesuai dengan ISO / TS 15066, ada 4 bentuk kolaborasi:- Penghentian terkontrol (Penghentian yang dimonitor dengan peringkat keamanan) ;
- Membimbing manual;
- Pemantauan kecepatan dan pemisahan ;
- Kekuasaan dan pembatasan kekuatan
Mari kita pertimbangkan masing-masing secara lebih rinci.
Berhenti dipantau dinilai keamananBentuk ini digunakan ketika robot bertindak terutama sendiri, tetapi kadang-kadang seseorang perlu memasuki ruang kerja. Misalnya, robot memproses benda kerja, tetapi di tengah proses teknologi, seseorang harus melakukan operasi dengannya yang tidak dapat dilakukan robot. Jika seseorang memasuki zona keamanan yang telah ditentukan, robot akan berhenti bergerak. Pada saat yang sama, daya pada mesin tidak hilang - mereka berhenti. Ini adalah poin yang sangat penting, karena setelah seseorang meninggalkan zona aman, robot akan segera mulai bekerja. Ini memungkinkan Anda untuk tidak membuang waktu untuk memulai kembali program kerja secara lengkap, seperti halnya robot yang berhenti sama sekali. Jika orang terus-menerus melewati robot, dia tidak akan punya waktu untuk bekerja.
- Pemberhentian disediakan tanpa kehilangan daya engine (jeda, bukan berhenti).
- Operator dapat berinteraksi dengan robot.
- Pekerjaan otomatis dapat dilanjutkan ketika seseorang meninggalkan ruang kerja.
- Pada suatu saat, seseorang atau robot dapat bergerak.
- Ini dapat digunakan dengan robot industri biasa, tetapi Anda perlu menambahkan penghalang keamanan ringan (pengukur jarak laser, detektor foto).
Panduan manualBentuk kolaborasi ini digunakan untuk operasi presisi dengan benda berat (misalnya, memasang pintu mobil). Bentuk ini dapat digunakan untuk bekerja dengan robot industri biasa, tetapi dengan perangkat tambahan yang "merasakan" kekuatan yang diterapkan pekerja pada manipulator, ini biasanya merupakan sensor torsi pada flensa robot.
- Operator bersentuhan langsung dengan robot.
- Robot berada di bawah kendali manual.
- Baik manusia dan robot dapat bergerak secara bersamaan (gerakan dikendalikan oleh manusia).
- Robot industri biasa dapat digunakan.
- Diperlukan peralatan tambahan (sensor torsi).
Pemantauan kecepatan dan pemisahanDi sini, lingkungan robot dikendalikan oleh penghalang keselamatan ringan, yang melacak posisi orang, seperti dalam bentuk kolaborasi pertama. Perbedaannya terletak pada skenario: jika dalam bentuk pertama tugas utama robot adalah untuk berhenti, maka di sini adalah pekerjaan simultan dari seseorang dan robot. Perilaku robot akan bergantung pada zona yang telah dikonfigurasikan sebelumnya dalam program kontrolnya: ketika seseorang mendekat, robot mengurangi kecepatan gerakannya, dan jika seseorang mendekat sehingga tabrakan tidak terhindarkan, penghentian terjadi. Ketika seseorang bergerak lebih jauh, robot kembali bekerja dan berakselerasi.

- Kecepatan robot berkurang saat seseorang mendekat.
- Robot berhenti ketika tabrakan dengan seseorang terjadi.
- Seseorang dan robot dapat bergerak secara bersamaan.
- Ini dapat digunakan dengan robot industri biasa, tetapi Anda perlu menambahkan penghalang keamanan ringan (pengukur jarak laser, detektor foto).
- Digunakan untuk operasi yang sering membutuhkan kehadiran personel.
Gambar: Roberta Nelson Shea - "Pengantar ISO / TS 15066"Ketiga bentuk kolaborasi yang dijelaskan di atas dapat digunakan dengan robot industri konvensional, tergantung pada ketersediaan perangkat tambahan. Solusi semacam itu disebut
sistem robot kolaboratif . Perbedaan antara
robot kolaboratif adalah bahwa itu mungkin tidak menggunakan perangkat keselamatan tambahan (eksternal) - mereka sudah dibangun di dalamnya. Perbedaan penting lainnya antara sistem robot kolaboratif dan robot kolaboratif adalah bahwa ketika bekerja bersama, kontak dengan seseorang dikecualikan. Tetapi robot kolaboratif dapat bersentuhan dengan tubuh manusia tanpa membahayakannya. Ini dicapai dengan membatasi kekuatan dan upaya.
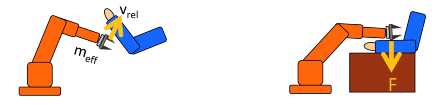
Kekuasaan dan pembatasan kekuatanSebagian besar orang, yang mewakili cobot, berarti robot yang menggunakan bentuk kolaborasi khusus ini. Karena itu, kami mempertimbangkannya secara lebih rinci.
Dalam "sambungan" robot adalah sensor torsi yang dapat menentukan fakta tabrakan dengan seseorang. Jika sensor mendeteksi kelebihan gaya yang diizinkan, robot akan berhenti. Robot ini juga dirancang untuk membubarkan pasukan di permukaan yang luas, jika terjadi benturan - itulah sebabnya detail tubuh mereka paling sering dibuat dengan bentuk bulat. Fungsi untuk membatasi kekuatan dan kekuatan, sebagai suatu peraturan, termasuk dalam perangkat lunak standar.
- Kekuatan dan kekuatan robot dikendalikan sehingga kontak yang tidak disengaja antara robot dan operator tidak akan membahayakan.
- Seseorang dan robot dapat bergerak secara bersamaan.
- Kemungkinan langkah pengurangan risiko:
- Faktor desain robot (misalnya, bentuk bundar, bahan mudah ditempa);
- pilihan aplikasi yang sesuai dan desain sel robot (misalnya, ambil, benda kerja, lintasan, dll.).
Kontak dalam PFL dapat terdiri dari dua jenis: transient (transient) dan quasi-static (quasi-Static) .
| Kontak transisi
| Kuasi-statis
kontak
|
Deskripsi
| Hubungi acara "singkat" (<50 ms).
Bagian tubuh manusia biasanya bisa memantul.
| Kontak bisa lama.
Bagian dari tubuh manusia dapat ditangkap.
|
Batasan kriteria (apa yang perlu dikelola)
| Upaya impuls, tekanan, tegangan.
Transfer energi, daya spesifik.
| Kekuatan puncak, tekanan, tegangan
|
Aksesibilitas dalam desain / kontrol
| Posisi robot, payload.
Kecepatan (relatif).
Area kontak, durasi.
| Kekuatan (torsi tautan, posisi).
Area kontak, durasi.
|
 Gambar: Bjoern Matthias - "Robot kolaboratif, Kekuatan dan Pembatasan Kekuatan"Langkah-langkah pengurangan risiko
Gambar: Bjoern Matthias - "Robot kolaboratif, Kekuatan dan Pembatasan Kekuatan"Langkah-langkah pengurangan risiko | Kontak transisi
| Kontak Statis Kuasi
|
Konstruksi
| Penurunan berat badan efektif.
Area kontak bertambah.
Durasi kontak meningkat.
| Area kontak bertambah.
|
Manajemen
| Kurangi kecepatan relatif.
Turunkan massa efektif dengan pemilihan posisi yang sesuai.
| Mengurangi torsi dan daya maksimum.
Mengurangi waktu kontak.
|
Konfigurasi utama adalah keseimbangan antara keamanan dan kinerja.Spesifikasi teknis ISO / TS 15066 termasuk tabel yang dikembangkan oleh University of Mainz studi ambang nyeri, yang menyediakan daftar tingkat kekuatan dan tekanan untuk merancang upaya robot (ambang nyeri 100 orang pada 29 titik nyeri dipelajari).


 Sumber: ISO / TS 15066: 2016, Gbr. 4, Gambar A.1
Sumber: ISO / TS 15066: 2016, Gbr. 4, Gambar A.1 Sumber: ISO / TS 15066: 2016.Sumber: R. Nelson Shea, Presentasi NRSC 2016. Digunakan dengan izinIngat: keamanan adalah tidak adanya cedera.
Sumber: ISO / TS 15066: 2016.Sumber: R. Nelson Shea, Presentasi NRSC 2016. Digunakan dengan izinIngat: keamanan adalah tidak adanya cedera.Bagian 2. Sejarah ular kobot
Cobot pertama dikembangkan pada tahun 1996 oleh
J. Edward Colgate dan
Michael Peshkin dari Northwestern University (USA). Sebagai perbandingan, robot industri konvensional telah diproduksi selama lebih dari 30 tahun saat ini. Namun, istilah "cobot" diciptakan sebagai hasil dari kompetisi untuk nama terbaik oleh orang lain dari universitas yang sama - Brent Gillespie. The Wall Street Journal sangat menyukai istilah itu sehingga mereka memasukkannya ke dalam daftar
Words of Tomorrow dan memberikan hadiah sebesar $ 50
Paten cobot pertama diajukan di Amerika Serikat pada Februari 1996 (
US 5.923.129 ), dan paten menggunakan istilah cobot pada Oktober 1997 (
US 5.952.796 ).
Foto-foto cobot pertama dapat dilihat di siniPengembangan cobot di Northwestern University didukung oleh dana perusahaan General Motors dan Ford, serta US National Science Foundation. Pada tahun 1996 yang sama, para ilmuwan mendirikan perusahaan Cobotics (pada tahun 2002 diserap oleh Stanley Assembly Technologies).
Cobots mendapatkan popularitas mereka saat ini berkat penampilan perusahaan Universal Robots (Denmark) pada tahun 2005. Gagasan yang murah dan mudah untuk membuat dan mengoperasikan robot (dibandingkan dengan yang industri) datang ke pendiri pada tahun 2003. Setelah membuat beberapa prototipe, pada tahun 2008 perusahaan merilis prototipe serial pertama robot UR5 (yang paling populer saat ini) dan menerima investasi dari pemerintah Denmark. Pada 2012, perusahaan merilis robot kedua (UR10), dan pada 2015 diakuisisi oleh American Teradyne seharga $ 285 juta.
Setelah kesuksesan Robot Universal, cobot mulai dibuat oleh perusahaan yang telah lama dan berhasil menduduki pasar robot industri (FANUC, ABB, KUKA, BOSCH, dan lainnya), dan startup serupa mulai muncul:
Rethink Robotics , Doosan Robotics, Techman Robot. Di antara proyek-proyek muda ada juga imigran dari negara-negara CIS - startup Belarus Rozum Robotics.
Bagian 3. Di mana dan bagaimana cobot digunakan
Berapa banyak cobot di dunia? Terlepas dari semakin populernya cobot, mereka belum dipilih dalam kelas terpisah dalam studi tahunan World Robotics, yang melakukan sumber data utama dalam industri, International Federation of Robotics (IFR).
Sekitar 2 juta keping robot industri saat ini digunakan di dunia (perkiraan IFR untuk 2017). Berapa banyak dari mereka yang kolaboratif tidak diketahui secara pasti. Ada penilaian oleh penelitian Barclays, yang menurutnya pada tahun 2017 ada 32 ribu cobot yang beroperasi, sebagian besar dihasilkan oleh
Universal Robots .
Beberapa tahun yang lalu, cobot dianggap sebagai peralatan laboratorium eksklusif, yang tidak memiliki tempat dalam produksi, tetapi kemungkinan konfigurasi yang fleksibel dan biaya integrasi minimal memungkinkan kami untuk mengatasi hambatan psikologis. Sekarang robot dari kelas ini digunakan dalam industri makanan, cahaya dan bahkan di industri otomotif yang secara tradisional ditempati oleh robot klasik.
Barclays Research
memperkirakan pasar pada tahun 2017 sebesar $ 800 juta. Ada bukti bahwa hingga sepertiga dari cobot
dijual di Cina . IFR menilai pasar robot industri pada 2017 sebesar $ 13,1 miliar.
Prakiraan untuk tahun-tahun mendatang:
IFR memperkirakan ukuran total pasar robot industri pada tahun 2020 sebesar $ 23,2 miliar. Jika kita membandingkan perkiraan Barclays dan IFR, kita akan mendapatkan peningkatan yang nyata dalam pangsa total dari cobot: dari 6,1% pada 2017 menjadi 13,5% pada 2020 - cukup dinamis.
Apa yang dapat dilakukan oleh cobot:- Pilih & Tempat: memuat sabuk konveyor yang tidak diturunkan.
- Memuat / membongkar benda kerja di mesin.
- Menguji dan menyortir bagian: memeriksa atau menyortir objek acak pada konveyor sebagai bagian dari kontrol kualitas atau kebutuhan lainnya.
- Pengemasan: pengumpulan dan penempatan barang dalam wadah untuk transportasi atau penyimpanan.
- Perakitan mudah: perakitan elektronik dan peralatan rumah tangga.
- Operasi penyelesaian: menghilangkan kelebihan plastik atau logam dari bagian-bagian.
Penggerak pertumbuhan Cobot di tahun-tahun mendatang:1. Cobot lebih murah daripada robot industri biasa (~ $ 25 ribu daripada ~ $ 50) -> ambang masuk untuk usaha kecil dan menengah (UKM) berkurang.
2. Cobots lebih mudah diatur: tidak perlu untuk dapat memprogram. Setelah satu hari pelatihan, pekerja akan dapat mengkonfigurasi robot untuk melakukan tugas dengan kompleksitas sedang.
Anda bisa mencobanya sendiri . Artinya, tidak perlu mempekerjakan insinyur layanan atau integrator sistem -> ambang batas masuk untuk UKM lagi menurun.
3. Kobotov lebih mudah untuk dipindahkan: mereka lebih mudah daripada yang industri, mereka tidak membutuhkan infrastruktur lokal dalam bentuk kandang -> daya tarik bagi UKM meningkat, karena produksi dapat dengan cepat diatur ulang.
4.
Peningkatan biaya tenaga kerja manual karena populasi yang menua dan
penurunan jumlah orang yang mampu (tingkat pekerja per jam: € 40 di Jerman, € 12 di Amerika Serikat, € 11 di Eropa Timur dan € 9 di Cina. Biaya cobot adalah $ 6 / jam) .
5. Mengembalikan sinergi dari faktor-faktor sebelumnya mengarah pada fakta bahwa AS dan UE mengembalikan produksi dari Cina ke tanah air mereka. Ini dapat membantu mengurangi biaya pengiriman dan meningkatkan kualitas produk.
6. Program negara yang bertujuan otomatisasi dan robotisasi produksi. Mereka dapat merangsang dan mendukung (termasuk secara finansial) perolehan dan penggunaan robot:
- "Industri 4.0" di Jerman;
- "Made in China 2025" di Cina;
- "Inisiatif robotika nasional 2.0" di AS.
Bagian 4. Siapa yang menghasilkan cobot
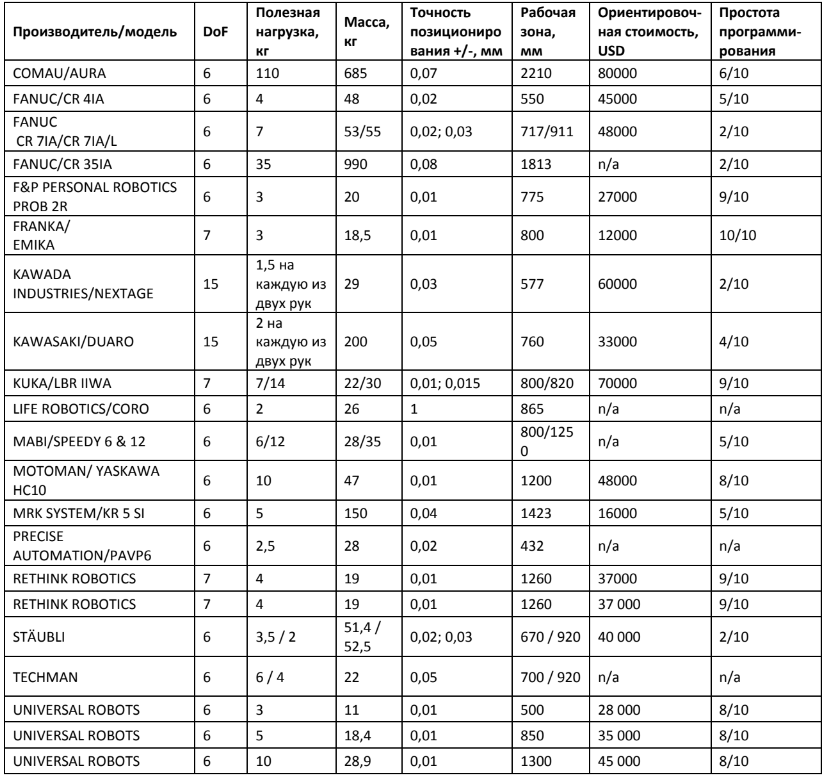 Unduh tabel
Unduh tabelBagian 5. Bagaimana Anda dapat menghasilkan dari cobot dan bagaimana menggunakannya untuk memecahkan masalah Anda
Cara menghasilkan uang dari tongkol:
Untuk menggunakan cobot dalam menyelesaikan masalah mereka, perlu untuk mengidentifikasi proses potensial (tugas) untuk otomatisasi. Ideal untuk otomatisasi pertama adalah tugas yang berulang dengan tingkat kepastian yang tinggi (dapat diprediksi).
| Adil
untuk mengotomatisasi
| Sulit
untuk mengotomatisasi
|
Tugasnya
| Memindahkan objek, mengikuti lintasan tanpa usaha
atau dengan upaya konstan
| Kontrol gaya, mis. Pemolesan atau perakitan presisi
|
Item
| Berbagai kecil item (ukuran, massa,
material), bentuk yang diketahui dan biasa (silinder, kotak)
| Berbagai macam barang, bentuk kompleks,
benda yang dapat dideformasi dan rapuh
|
Pengaturan subjek
| Item ditumpuk secara merata: dalam kotak, tumpukan, atau pada palet
| Barang-barang dibuang di kotak / keranjang atau melanjutkan
conveyor cepat
|
Integrasi dengan peralatan lain
| Menggunakan antarmuka yang digunakan seseorang:
kancing, pulpen
| Koneksi dan konfigurasi sensor, integrasi perangkat lunak
dengan peralatan mesin
|
Pemrograman
| Gerakan berulang dalam satu urutan (tanpa
kondisi dan pohon)
| Logika yang kompleks dan banyak kondisi tergantung pada
informasi dari sensor
|
Di sini Anda dapat menghitung ROI proyek robotika Anda.Artikel ini menggunakan terjemahan publikasi berikut:
- Carole Franklin - "Ikhtisar ISO / TS 15066: 2016"
- Roberta Nelson Shea - "Pendahuluan ISO / TS 15066"
- Bjoern Matthias - "Kekuatan robot kerja sama dan Pembatasan Kekuatan"
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq - "Cobot eBook", "Memulai robot kolaboratif", "ISO / TS 15066 Dijelaskan"
Teks disiapkan oleh Albert Efimov dan Denis Zatyagov dari Sberbank Robotics Laboratory