Seperti yang kami tulis
sebelumnya , salah satu bidang prioritas pekerjaan laboratorium kami adalah exoskeleton industri.
Ketika kita mendengar kata exoskeleton, gambar Robert Downey Jr selalu muncul di depan kita, mengenakan baju besi ungu-emas Iron Man, menjulang ke awan dan menghamburkan musuh-musuh umat manusia ke kiri dan ke kanan.
Exoskeleton yang ada dan sedang dikembangkan saat ini belum mampu mengangkat beban multi-ton, terbang di stratosfer dan mengembangkan kecepatan supersonik, tetapi mungkin ini tidak diperlukan dari mereka? ..

Apa itu exoskeleton?
Standar internasional
ISO 13482: 2014 (en) Robot dan perangkat robot - Persyaratan keselamatan untuk robot perawatan pribadi mengklasifikasikan exoskeleton sebagai robot pembantu yang melekat pada tubuh manusia selama penggunaan, yang lebih sering disebut sebagai robot pakaian. Laboratorium Penelitian Angkatan Darat Nasional AS melakukan
survei di antara para pengembang dan operator robotika tentang apa sebenarnya "robot berpakaian", di mana semua responden sepakat:
- Ini adalah alat robot yang dapat dipakai, unsur-unsur yang diperbaiki langsung ke operator manusia;
- Ini adalah alat robot yang secara fisik menurunkan operator, memberinya dukungan fisik, dan meningkatkan kemampuan fisiknya.
Dengan demikian, exoskeleton adalah perangkat mekanik yang dapat dipakai (dikenakan pada seseorang) atau paket perangkat lunak mekatronik dengan elemen struktur antropomorfik, yang dirancang untuk melipatgandakan kemampuan fisik seseorang dengan menduplikasi dan mensinkronisasi aktivitas motor yang terakhir secara serempak. Berbicara tentang melipatgandakan kemampuan fisik, yang kami maksud bukan hanya Olimpiade “Lebih cepat! Di atas! Lebih kuat! ”, Tetapi juga lebih sehat, lebih kuat, lebih efisien, secara teknis lebih benar. Exoskeleton dirancang untuk membantu orang mengatasi beberapa hambatan fisiologis yang ada, sehingga menggabungkan kecerdasan, kreativitas, kemampuan beradaptasi, dan kemampuan belajar pekerja manusia dengan kekuatan, daya tahan, dan akurasi pekerja robot. Pada bagian ini, kerangka luar juga merupakan jenis robotika kolaboratif yang khas.
Sejarah dan evolusi exoskeleton

Nenek moyang dari exoskeleton dapat dianggap sebagai elastiped. Elastiped - perangkat yang dirancang untuk memfasilitasi berjalan, berlari, dan melompat yang dimaksudkan untuk penggunaan militer. Penulis penemuan ini adalah penemu Rusia Nikolai Aleksandrovich Yagn (1849 - 1905). Pada akhir abad XIX, ia mengembangkan dan mematenkan beberapa modifikasi dari exoskeleton pasif
"Elastiped" .
Upaya pertama untuk mengembangkan exoskeleton listrik dilakukan oleh spesialis General Electric di awal 60-an abad ke-20. Sebuah proyek bernama Hardiman ditugaskan oleh Departemen Pertahanan AS. Dalam perjalanan proyek, platform dua-pediler dan manipulator dengan transmisi elektro-hidrolik dikembangkan, desainnya adalah untuk menyediakan kemungkinan mengangkat beban dengan berat total hingga 680 kg.
Elastiped N. A. Yagna, sketsaKelemahan signifikan dari desain exoskeleton adalah getaran yang terjadi selama operasi, yang menyebabkan perangkat terbalik berulang kali selama pengujian. Tes yang melibatkan operator belum dilakukan.
Akibatnya, penelitian difokuskan pada pengembangan salah satu manipulator exoskeleton. Terlepas dari kenyataan bahwa para pengembang berhasil mencapai kapasitas beban target 750 pound (340 kg), massa perangkat itu sendiri hampir tiga perempat ton, yang lebih dari dua kali massa muatan yang diangkat.
Itu tidak mungkin untuk mengatasi kekurangan desain perangkat, sebagai hasilnya, pada tahun 1971 proyek Hardiman ditutup karena kurangnya prospek untuk pengembangan lebih lanjut [https://en.wikipedia.org/wiki/Hardiman].
Di sebelah kanan adalah prototipe dari exoskeleton Hardiman.Pada tahun 1970-an, ilmuwan Yugoslavia Miomir Vukobratovich menciptakan prototipe exoskeleton dengan drive pneumatik, yang seharusnya membantu orang lumpuh untuk bangkit kembali. Pada 80-an, Vukobratovich mempresentasikan kerangka luarnya ke Uni Soviet. Ilmuwan Rusia dan Eropa kemudian mengambil sebagai dasar proyek Vukobratovich ketika menciptakan teknologi mereka. Jadi, pada awal 1980-an, sebuah exoskeleton untuk penyandang cacat dari Institut Sentral Traumatologi dan Ortopedi N. N. Priorov muncul.
Menariknya , proyek terkenal Rusia ExoAtlet dilakukan oleh para ilmuwan yang baru mempelajari proyek Vukobratovich di Universitas Negeri Moskow.
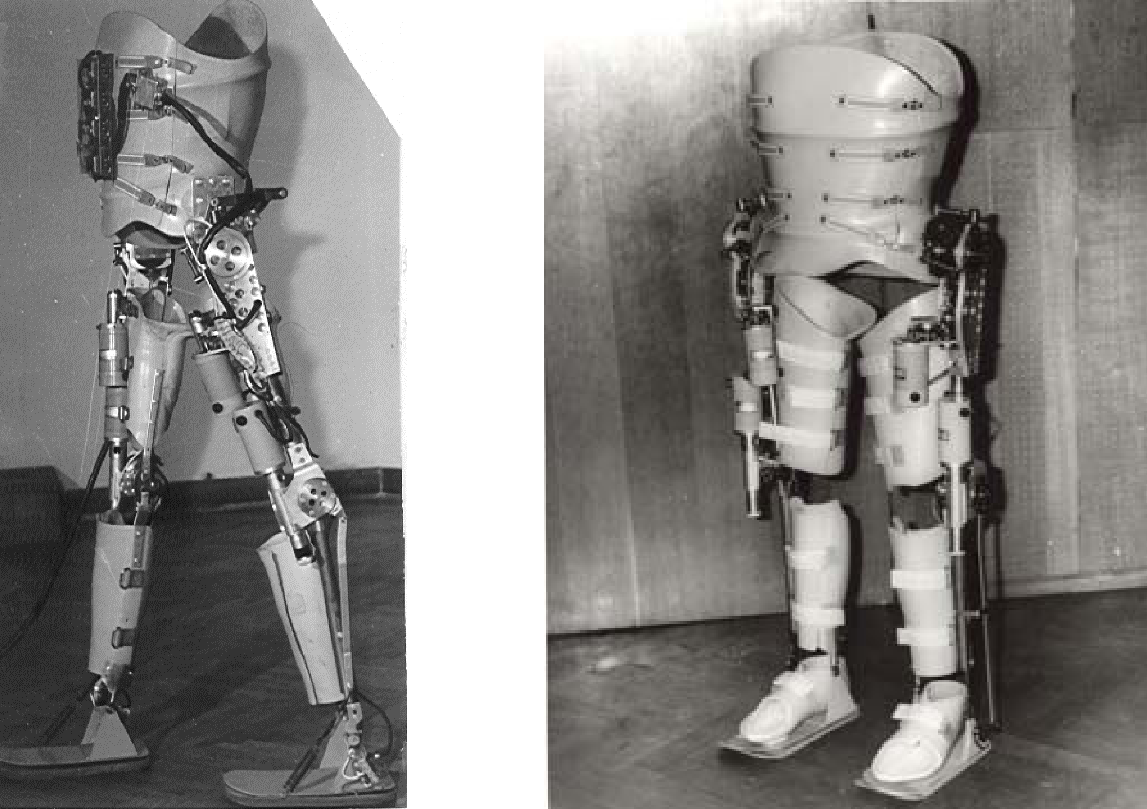 Exoskeleton dari Miomir Vukobratovich
Exoskeleton dari Miomir VukobratovichKurangnya sumber energi yang kompak dan aman, kurangnya komponen daya yang efektif dan kontrol secara signifikan menghambat pengembangan exoskeleton.

Hanya pada pertengahan tahun 2000-an gagasan untuk menciptakan "power suit" mulai direalisasikan. Sebagai contoh, Badan Proyek Penelitian Lanjutan Pertahanan Amerika Serikat (DARPA) memprakarsai pengembangan exoskeletons pada tahun 2001 sebagai bagian dari program Exoskeletons for Human Performance Augmentation. Badan ini mendanai $ 50 juta untuk berbagai peserta melalui program lima tahun. Sebagai bagian dari program, sistem Dpt Dipakai Energetically Autonomous Robot (WEAR) dari Sarcos Penelitian dari Salt Lake City, Utah dikembangkan, sebagai hasil dari penyempurnaan lebih lanjut dan modernisasi di mana
XOS2 exoskeleton kekuatan
penuh diperkenalkan, diperkenalkan oleh raksasa pertahanan Raytheon (yang mengakuisisi Sarcos Research pada 2007) tahun) pada bulan September 2010.
Sumber - Teknologi Angkatan DaratSaat ini, topik exoskeletal menjadi salah satu bidang robotika layanan yang paling berkembang secara dinamis, puluhan organisasi ilmiah dan perusahaan industri di beberapa negara di dunia terlibat dalam pengembangan kompleks exoskeleton mereka sendiri, termasuk AS, Jepang, Israel, Jerman, China, Prancis, Selandia Baru, Norwegia , Inggris, Korea Selatan, Italia dan Rusia.
Mengapa eksoskeleton industri?
Analisis pengalaman dunia memungkinkan kita untuk menyimpulkan bahwa saat ini ada tiga bidang utama penerapan modul dan kompleks exoskeleton berdasarkan pada mereka:
- eksoskeleton militer;
- exoskeletons rehabilitasi dan exoskeletons untuk mengimbangi kurangnya mobilitas penyandang cacat;
- exoskeleton untuk penggunaan industri.
Saat ini, arah exoskeletons industri sangat menarik, dan ada beberapa alasan untuk ini.
Alasan # 1: aspek pasar
Alat robot yang dapat dipakai yang dirancang untuk digunakan dalam produksi industri menjadi area yang paling cepat berkembang dalam penggunaan komersial teknologi exoskeletal.
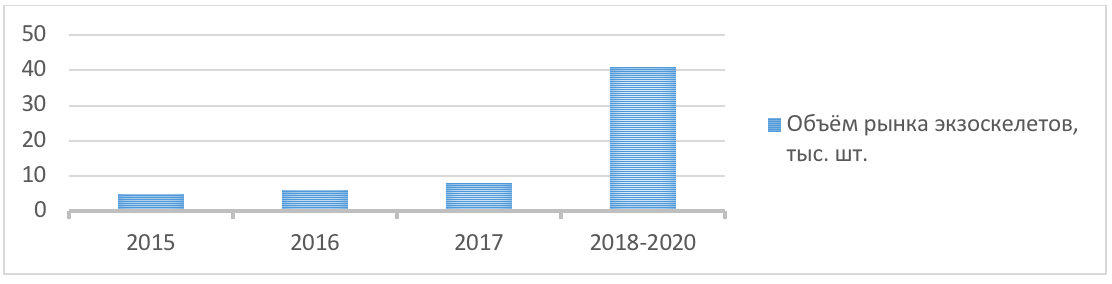 Dinamika pasar exoskeleton global pada periode 2015 hingga 2017 dengan perkiraan untuk 2018-2020. menurut IFR
Dinamika pasar exoskeleton global pada periode 2015 hingga 2017 dengan perkiraan untuk 2018-2020. menurut IFR
Perkiraan tersegmentasi dari pengembangan pasar exoskeleton pada 2023-2024. Berdasarkan penelitian dari
Global Markets Insight dan
Markets & Markets .
Exoskeleton untuk pekerjaan dan industri dapat digunakan di lokasi konstruksi, di dok kering, di pabrik, gudang, dan bahkan di ruang bedah. Pengenalan perangkat tersebut memberikan solusi untuk tiga tugas bisnis penting:
a) meningkatkan produktivitas tenaga kerja dan mengurangi kompleksitas operasi produksi manual;
b) pengurangan volume pembayaran sosial dan kompensasi yang terkait dengan terjadinya cedera terkait pekerjaan dan penyakit akibat kerja pekerja di unit produksi;
c) memberikan motivasi tambahan bagi karyawan, yang dicapai dengan menciptakan kondisi kerja yang lebih nyaman.
Dalam presentasi terbaru dari Asosiasi Robotika yang Dapat Dipakai, Dr. Joseph Hitt
menggambarkan exoskeletons untuk produksi dan konstruksi sebagai "buah rendah tergantung" dari pasar exoskeletal, yang cukup benar, karena dibandingkan dengan rehabilitasi atau exoskeletons militer, ada sejumlah bidang seperti pakaian listrik industri keuntungan signifikan:
a) lingkaran konsumen sangat luas dan tidak terbatas pada kelompok pembeli potensial spesifik tertentu, di samping itu, audiens target mencakup banyak perusahaan manufaktur terbesar dengan tingkat solvabilitas tinggi, yang di masa depan akan dapat membeli jutaan eksoskeleton industri untuk pekerjanya;
b) sampai saat ini, di ceruk ini, belum ada pemimpin yang jelas dan otoritas yang diakui secara universal;
c) tidak ada hambatan administratif dan legislatif untuk memasuki pasar;
d) persyaratan kinerja yang lebih lunak (dibandingkan, misalnya, dengan solusi militer serupa), tidak adanya pembatasan yang terkait dengan basis komponen yang digunakan, sebagai akibatnya, biaya pengembangan dan pembuatan yang lebih rendah.
Alasan # 2: Aspek Sosial
Bahkan di perusahaan manufaktur berteknologi tinggi modern, sebagai bagian dari proses produksi, ada banyak operasi yang cukup sulit untuk diotomatisasi. Menurut Yayasan Eropa untuk Peningkatan Kondisi Hidup dan Kerja, hingga 64% pekerja berketerampilan tinggi menghabiskan hampir tiga perempat waktu kerja mereka untuk mengangkat dan membawa berbagai barang. Spesialis dalam produksi terus-menerus harus menggunakan penggunaan tenaga kerja manual, sebagai akibatnya mereka terkena faktor-faktor berbahaya yang meningkatkan kemungkinan cedera, terutama pengembangan berbagai jenis gangguan muskuloskeletal, yang tetap menjadi salah satu penyakit akibat kerja yang paling umum di Uni Eropa. Hal ini, pada gilirannya, mengarah pada peningkatan biaya pemeliharaan pekerja selama periode disabilitas mereka dan ke penurunan produktivitas tenaga kerja di perusahaan secara keseluruhan. Menurut Work Foundation, hari ini sekitar 44 juta pekerja UE menderita kelainan muskuloskeletal, yang secara total menyebabkan kerugian bagi ekonomi Eropa, diperkirakan mencapai lebih dari 240 miliar euro. Dan ini hanya negara-negara UE. [
Van der Vorm, Johan; O`Sullivan, Leonard; Nugent, Rachel; de Looze, Michiel. Pertimbangan untuk mengembangkan standar keselamatan untuk exoskeleton industri ].
Alasan # 3: aspek teknologi
Eksposur industri jauh kurang sensitif terhadap karakteristik kendala teknologi dari seluruh industri kerangka luar.
a) Tidak seperti exoskeleton militer yang dimaksudkan untuk penggunaan lapangan dan berbaris dalam kondisi otonomi energi lengkap, exoskeleton industri sebagian besar dimaksudkan untuk digunakan di bengkel, gudang, jalur produksi, dll. Karena itu, persyaratan untuk sumber energi otonom yang memasok unit penggerak aktif dari eksosuit berkurang, apalagi, karena ketersediaan jaringan listrik, kebutuhan untuk semua jenis baterai dan sistem pembangkit menghilang selama satu jam sama sekali. Ini terutama berlaku untuk exoskeleton dengan drive hidrolik, seperti menghindari kebutuhan untuk menempatkan stasiun oli seluler langsung pada kasing kerangka, yang pada gilirannya menghilangkan sejumlah kesulitan yang terkait.
b) Tingkat persyaratan untuk sistem kontrol untuk exoskeleton industri jauh lebih rendah daripada solusi serupa untuk penggunaan medis atau militer. Di satu sisi, operator exoskeleton adalah orang yang berbadan sehat, yang berarti bahwa ia dapat menggunakan alat teknis dalam pekerjaannya dengan organ "tradisional" dan antarmuka kontrol, seperti joystick, touchpads, antarmuka suara, dan lainnya, sehingga ia tidak perlu rumit untuk belajar, mahal dan solusi antarmuka teknologi tinggi, seperti, misalnya, antarmuka neurokomputer. Di sisi lain, kecepatan dan keakuratan reaksi terhadap aksi kontrol dalam exoskeleton industri tidak sepenting di exoskeleton militer, karena dalam kondisi permusuhan dua hingga tiga persepuluh detik dari keterlambatan umpan balik dapat dengan mudah menghabiskan umur operator. Kondisi untuk penggunaan exoskeletons industri paling sering tidak begitu kritis.
Perlu dicatat bahwa poin sebelumnya tidak boleh menyesatkan Anda: masalah energi, manajemen ergonomis yang efisien, dan penggunaan yang aman adalah landasan seluruh industri kerangka kerja, dan kerangka industri tidak berarti pengecualian, kami hanya mengatakan bahwa tingkat persyaratan untuk aspek-aspek teknologi dalam kasus khusus ini dapat secara signifikan lebih rendah, yang tentu saja tergantung, antara lain, pada kondisi dan spesifikasi aplikasi.
Klasifikasi Exoskeleton Industri
Dengan desain mereka, exoskeleton industri dapat dibagi menjadi exoskeleton dari tubuh bagian atas atau bawah, serta exoskeleton ukuran penuh.
Dengan sifat dampak gaya pada pasif (tidak dilengkapi dengan solusi drive, dukungan dan pembongkaran dalam kasus tersebut dilakukan melalui penggunaan berbagai jenis peredam, pegas, keseimbangan, dll.) Dan aktif, yang pada gilirannya dapat dibagi menjadi subkelompok tergantung pada jenis yang digunakan solusi penggerak (elektromekanis, hidrolik, pneumatik, gabungan).
Exoskeleton aktif juga dapat dibagi menjadi otonom dan non-otonom, tergantung pada struktur sistem pasokan energi.
Tergantung pada tujuannya, kompleks exoskeleton untuk pekerjaan dan industri dapat dibagi menjadi
6 kategori :
- Exoskeleton untuk memegang alat: exoskeleton ini terdiri dari pegas, tuas mekanis tempat alat kerja dipasang. Tuas dihubungkan ke modul exoskeletal tubuh bagian bawah dan sistem penyeimbang, sedangkan bobot instrumen dipindahkan ke tanah. Untuk sebagian besar, exoskeleton tipe ini pasif, namun, ada solusi serupa dengan drive di bagian bawah
.
Exoskeleton "Fortis", Lockheed Martin, AS - Kursi tanpa kursi: ini adalah exoskeleton ringan yang dapat diperbaiki pada posisi yang paling nyaman bagi operator, yang mengurangi kelelahan dan keletihan pekerja selama bekerja lama dalam posisi tegak atau hanya statis (misalnya, dalam posisi semi-squat).
- Exoskeleton untuk menopang punggung: exoskeleton ini dapat mempertahankan postur yang tepat dan mengurangi tekanan pada punggung dan otot-otot tulang belakang saat memiringkan dan mengangkat.
Exoskeleton BackX, ExoBionicks, AS - Sarung tangan exo: sarung tangan mekanis yang dapat membantu pekerja memegang alat-alat tangan mereka dengan erat. Ada juga alat kerja terbalik yang membantu pekerja yang memiliki masalah fisiologis dengan pembukaan alami telapak tangan untuk membuka jari mereka dengan sarung tangan exoskeletal.
- Exosuit ukuran penuh: beberapa tahun yang lalu diyakini bahwa exosuit ukuran penuh yang berat akan digunakan untuk memecahkan masalah produksi. Sekarang, sebagian besar pengembang telah beralih ke solusi yang lebih kompak dan sangat terspesialisasi, namun, proyek-proyek exoskeleton berukuran penuh yang berat terus berkembang sekarang.
Sarcos Guardium XO, exoskeleton ukuran penuh, Sarcos Corp., USA - Modul robot yang melengkapi manusia: modul exoskeletal yang menyediakan pekerja dengan sepasang tangan kedua. Dua atau lebih lengan robot yang dipasang operator yang dipasang pada tubuh digunakan untuk menahan alat atau benda kerja di tempatnya.
Konsep Supernumerary Robotics Limbs, MIT Siapa yang hari ini mendesain atau memproduksi eksoskeleton industri?Korea SelatanDaewoo Shipbuilding & Marine Engineering
Perusahaan Motor Hyundai
Amerika SerikatSarcos / raytheon
Lockheed martin
Bionik AS
Ekso Bionics Holdings, Inc.
JepangPanasonic - Activelink
Cyberdine
Honda
Mitsubishi heavy industries
PrancisRobot gobio
Selandia BaruLaevo
SwissNoonee AG
IsraelSistem Rotbot
RusiaExochair
Teks ini disiapkan oleh Albert Efimov dan Igor Orlov dari Sberbank Robotics Laboratory.