Video ini adalah tempat Marc Raibert, pendiri Boston Dynamics, berbicara tentang robot: BigDog, Spot, SpotMini, Atlas. Berdasarkan video ini dan video lain di mana Marc tampil, saya akan menjelaskan secara singkat teknologi robot dan rencana masa depan perusahaan.
Marc Raibert mendirikan Boston Dynamics 25 tahun yang lalu, tetapi dia belum memasukkan robotnya ke dalam produksi. Pendiri menjelaskan ini dengan fakta bahwa perusahaan telah bekerja selama ini untuk pengembangan lebih cepat di luar cakrawala kemampuan robotika saat ini. Namun demikian, dalam robotnya, perusahaan mencapai tingkat ketika dimungkinkan untuk membuat robot listrik kecil dengan empat kaki yang mampu bergerak secara independen di sekitar medan dan bangunan yang kasar. Oleh karena itu, mereka akan memulai produksi massal robot SpotMini pada pertengahan 2019 dalam jumlah 1000 buah per tahun.
Saat ini, 10 robot sedang diuji oleh pelanggan potensial, 100 robot lainnya akan dikirimkan dalam waktu satu tahun untuk pengujian.
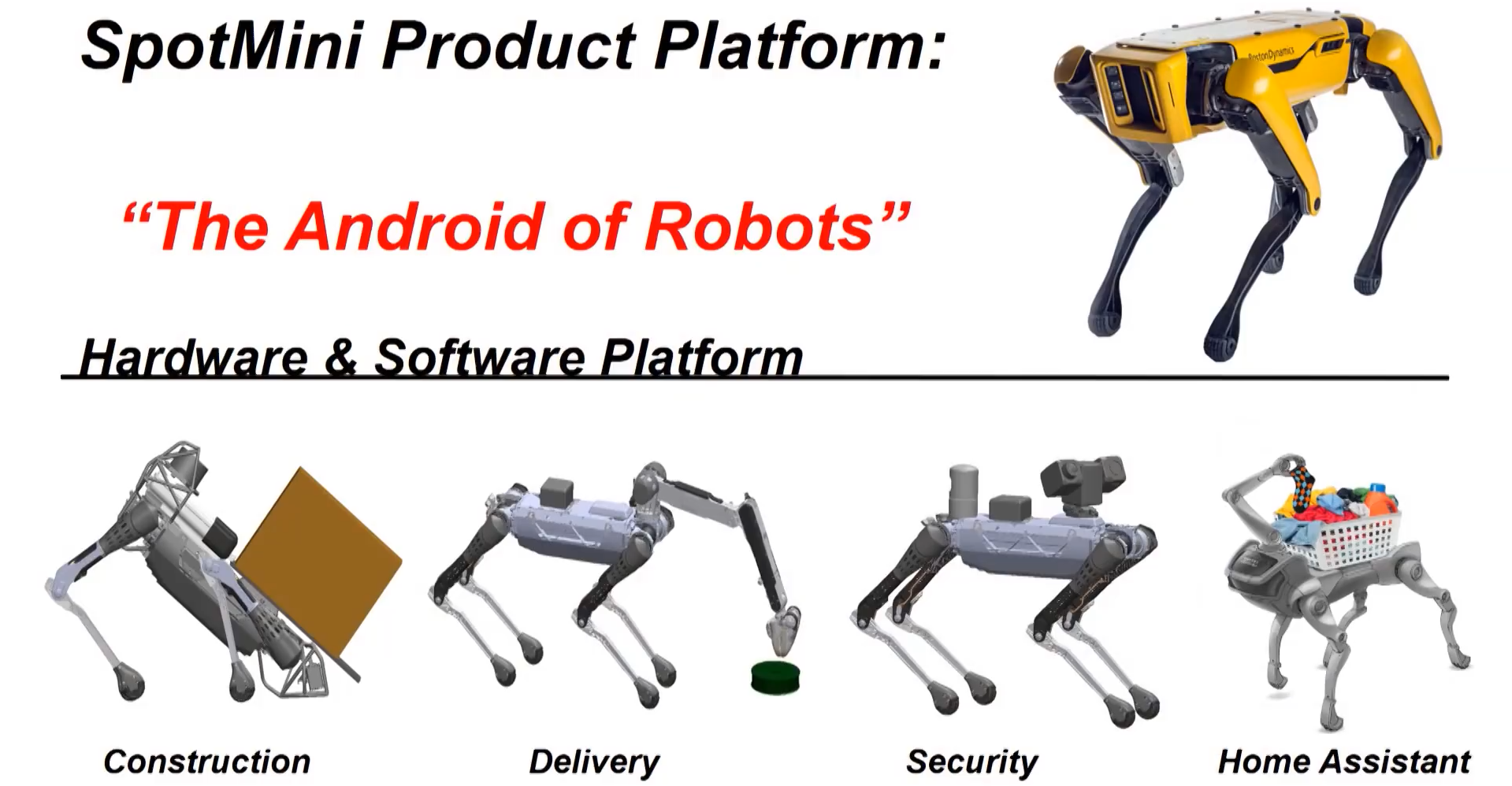
Robot akan dijual sebagai platform tempat Anda dapat memasang tangan. Ini memiliki API yang memungkinkan pengembang pihak ketiga untuk menulis aplikasi mereka dan menggunakan fungsi dasar robot. Ada beberapa demo aplikasi semacam itu di video.
Dipahami bahwa Boston Dinamics telah meletakkan fungsi dasar dalam robot, dan hanya perintah tingkat tinggi seperti pergi ke sana dengan kecepatan seperti itu dapat diberikan kepada operator robot atau pengembang pihak ketiga, mengirimkan sekaleng Coke.
Marc mengklaim bahwa robot dapat bertindak di samping seseorang dan pada dasarnya adalah kolaboratif, yang ia benarkan dalam video sehingga robot hanya memiliki berat 27 kilogram dan karenanya tidak dapat membahayakan manusia.

SpotMini dapat mendeteksi sekaleng Coke, mengambilnya dan mentransfernya ke tempat lain, atau memberikannya kepada orang-orang. Foto di atas hanyalah contoh aplikasi untuk robot yang melakukan tugas seperti itu.
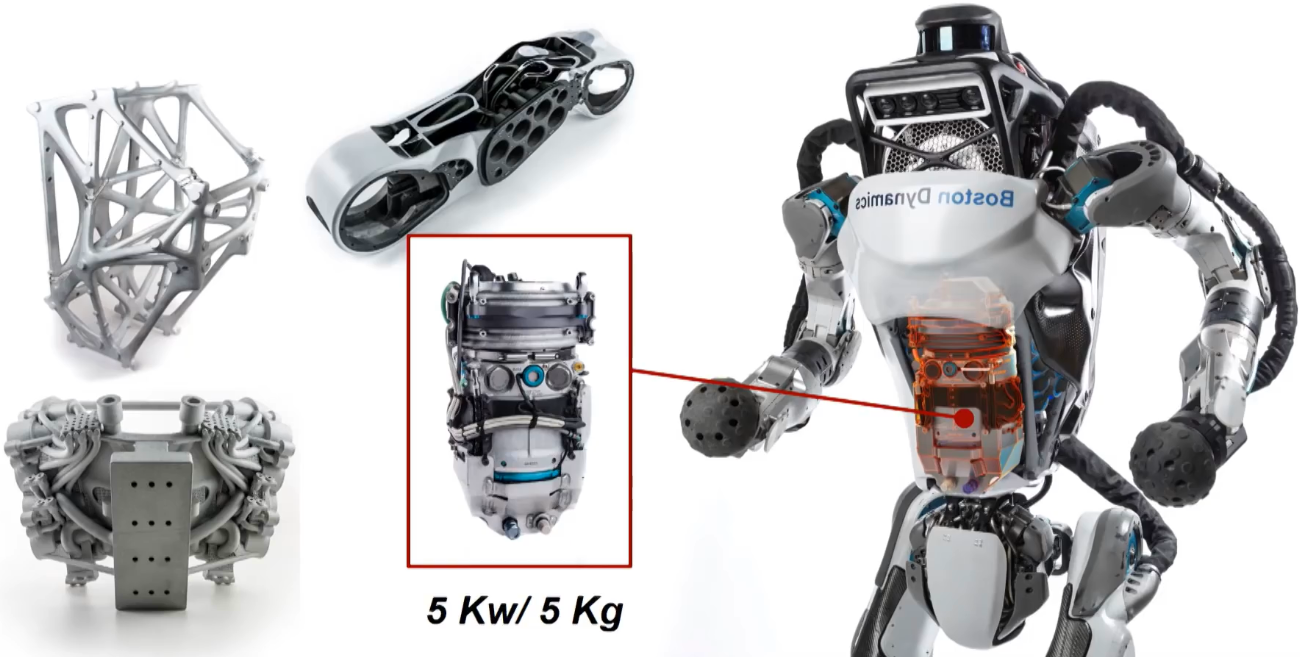
Yang juga menarik adalah kisah tentang teknologi yang digunakan dalam robot Atlas. Berat awal robot dikurangi dari 170 kilogram menjadi 75 dengan rasio daya yang sama. Pada saat yang sama, robot menjadi lebih lincah dan mampu. Ini dicapai karena metode desain baru dan pencetakan 3d. Video menunjukkan kaki robot yang dicetak pada printer, yang beratnya beberapa kali lebih sedikit dengan kekuatan yang sama.
Terutama yang perlu diperhatikan tentang pembangkit listrik. Dalam video tersebut, Marc mengatakan bahwa mereka berhasil masuk ke dalamnya: mesin, pompa, filter, manifold, dan jaket panas dengan baterai di perut robot, sementara berat seluruh struktur adalah 5 kilogram dengan kekuatan 5 kilowatt. Sekali lagi, ia mengatakan bahwa ini tidak akan mungkin terjadi tanpa teknik desain canggih dan pencetakan 3D.


Dalam video lain, ia berbicara tentang robot Menangani, itu direncanakan sebagai robot logistik yang dapat membawa beban dengan cepat jarak jauh, karena bukannya kaki memiliki roda.
Rekayasa balik kecil dari saya:
Dalam video tersebut, Marc Raibert mengatakan bahwa robot menggunakan 5 modul kamera, dua di depan dan satu di kiri, kanan dan belakang. Mereka rupanya menolak laser lidar dalam versi komersial. Foto menunjukkan bahwa modul kamera entah bagaimana tidak standar, total Anda dapat melihat 5 kamera dalam modul, mungkin beberapa dari mereka adalah kamera inframerah dengan penerima. Terlihat juga bahwa kedua kamera itu kecil dan tampak bersudut satu sama lain. Jika seseorang tahu apa modul ini, tulis di komentar. Dari semua ini kita dapat menyimpulkan bahwa robot hanya dapat melakukan dengan kamera stereo, mungkin dengan kamera inframerah. Algoritma penentuan posisi dan lokalisasi kemungkinan besar adalah SLAM visual, yang tidak jelas. Secara umum, perusahaan Boston Dinamics agak tertutup dan tidak banyak bicara tentang perangkat lunak robotnya, tetapi di forum orang yang bekerja di dalamnya menulis bahwa mereka memiliki kode kepemilikan mereka sendiri, terutama di C ++ dan sedikit di Python. Ada yang menyebutkan tentang penggunaan Drake. Mungkin dalam robot Atlas, ROS sebagian digunakan dalam kompetisi.
Dalam mekanika dan menghitung pergerakan anggota badan robot, penelitian Marc Raibert telah berlangsung sejak ia mendirikan laboratorium gerakan kaki pada tahun 1980 dan menulis buku Legged Robots that Balance pada tahun 1986. Juga, dari studi MIT yang saya jelaskan dalam artikel sebelumnya pada robot blind cheetah, kita dapat menyimpulkan bahwa metode serupa juga digunakan di SpotMini karena Marc Raibert adalah seorang profesor di MIT.
Bahkan, itu akan menjadi robot pertama yang cukup fungsional dan kompleks yang akan digunakan setiap hari di sebelah seseorang. Sementara dia hanya bisa mengambil sekaleng Coke dan tas wanita, apakah masih ada :)