
Saat ini, sejumlah besar perusahaan sedang berupaya membuat robomobiles atau sistem autopilot mereka sendiri untuk mobil-mobil perusahaan lain. Sayangnya, belum ada standar pengembangan tunggal, yang menyebabkan beberapa ketidaksepakatan antara pengembang itu sendiri dan para regulator. Setidaknya di AS.
Untuk mengetahui seberapa efisien autopilot tingkat kedua dari berbagai perusahaan mobil, organisasi nirlaba Lembaga Asuransi untuk Keselamatan Jalan Raya (IIHS) melakukan
studi skala besar yang melibatkan lima model mobil autopilot dari berbagai perusahaan.
Sebelum Anda mulai merinci laporan penelitian ini, perlu diingat berapa banyak level otonomi autopilot, dan dengan prinsip apa ada pembagian ke dalam level-level ini.
Jadi,
hanya ada lima di antaranya :
- Tingkat nol. Pengemudi mengendalikan semuanya - sistem rem, multimedia, jalur mobil, kecepatan, dll. Mesin tidak dapat melakukan apa-apa sendiri - itu hanya tidak disediakan oleh desain.
- Tingkat pertama. Sudah memiliki beberapa otomatisasi. Pengemudi mengemudikan mobilnya sendiri, tetapi mobil dapat mengurangi beberapa fungsi. Ini, misalnya, satu set kecepatan atau memegang mobil.
- Tingkat kedua. Sudah ada lebih banyak kebebasan autopilot. Mobil keduanya dapat menahan lintasan dan berakselerasi, sambil menggunakan informasi tentang situasi di sekitar mobil. Untuk ini, tentu saja, sensor, sensor dan, dalam beberapa kasus, kamera diperlukan. Pengemudi harus meletakkan tangannya di setir mobil dan tidak melepasnya. Mesin dapat mengerem jika perlu. Tingkat kedua dapat dikaitkan Autopilot dari Tesla. Sekarang perusahaan Ilona Mask melakukan segalanya untuk bergerak dari level 2 ke level 3 dan 4.
- Tingkat ketiga Pengemudi masih dibutuhkan di dalam kabin saat bepergian, tetapi perjalanan itu sendiri dilakukan hampir secara mandiri. Mesin mengumpulkan sejumlah besar data tentang lingkungannya saat mengemudi. Ngomong-ngomong, perbedaan antara level autopilot kedua dan ketiga tidak begitu besar, tetapi perbedaan antara level ketiga dan keempat sangat besar.
- Tingkat keempat adalah mobil yang sepenuhnya otonom. Hampir semua fungsi digandakan oleh autopilot, mobil dengan sistem tingkat keempat dapat bergerak cepat dan jarak jauh, tanpa memerlukan partisipasi pengemudi dalam proses mengemudi. Namun, keberadaan operator tetap disarankan. Tetapi dia dapat melakukan apa yang dia suka - membaca buku, mendengarkan musik, tidur, dll.
- Tingkat kelima Mobil dengan autopilot, yang berada di tingkat kelima, mengendarai mobil tidak lebih buruk, dan kemungkinan besar, lebih baik daripada pengemudi - orang. Kondisi eksternal yang sulit (tanah atau salju yang menutupi tanda), lalu lintas padat di jalan, dll. tidak mempengaruhi kualitas mengemudi sistem autopilot tingkat kelima.
Sedangkan untuk laporan IIHS, karyawan organisasi hanya memeriksa robomobiles level 2 (level 3.4 dan bahkan lebih, 5 saat ini tidak ada, setidaknya robomobiles seperti itu tidak masuk di jalan umum). Perwakilan IIHS mengevaluasi situasi di jalan umum di mana mobil dengan sistem kontrol otomatis dari berbagai pabrikan jatuh dan membandingkan tindakan autopilot.
"Tingkat kedua" dalam pemahaman IIHS bertepatan dengan definisi yang diberikan di atas. Artinya, mobil dengan sistem seperti itu dapat memperlambat, mempercepat dan mengubah arah jika perlu, dan tanpa partisipasi pengemudi. Jelas bahwa yang terakhir, jika diinginkan, dapat mengambil kendali sepenuhnya atas dirinya sendiri.
Mobil-mobil robot seperti BMW Seri 5 2017 (Driving Assistant Plus), Mercedes-Benz E-Class (Drive Pilot) 2017, Tesla Model 3 2018 (Autopilot 8.1), Tesla Model S 2016 (Autopilot 7.1), dan 2018 berpartisipasi dalam pengujian. Volvo S90 (Pilot Assist). Semua sistem autopilot yang disebutkan di atas telah menerima nilai tinggi dari tes AEB (pengereman darurat). Selain itu, peserta penelitian melakukan beberapa tes mobil dengan pilot otomatis di jalan uji - ini dilakukan untuk memeriksa bagaimana sistem berperilaku jika terjadi berbagai hambatan di jalan. Setelah itu, pengujian serupa dilakukan pada ruas jalan umum yang dialokasikan khusus.
Kontrol dan Pengereman Pesiar Adaptif
Dalam tes awal, semua mobil menunjukkan diri mereka dengan baik - mereka berhasil menghindari tabrakan dengan mobil yang tidak bergerak. Kendaraan uji bergerak dengan kecepatan sekitar 50 km / jam. Mobil Volvo menggunakan sistem pengereman yang paling agresif, sehingga bisa dikatakan. Mereka tidak berhenti di setiap kesempatan, tetapi pengereman dilakukan dengan cepat, yang menyebabkan ketidaknyamanan bagi pengemudi dan penumpang.
Selain itu, mobil dapat keluar tanpa kerusakan dan dalam situasi di mana orang lain mengemudi di depan mesin uji. Dalam tes, mobil di depan dengan tajam mengubah jalur, dan sebuah rintangan muncul di trek. Semua pilot otomatis mampu mengenali situasi - untuk mendeteksi hambatan dan menghentikan atau mengubah waktu. Omong-omong, situasi ini bukan hanya teori - pada tahun 2016 ada kecelakaan yang melibatkan mobil listrik Tesla, maka masalahnya justru bahwa Autopilot tidak mengenali kendala yang muncul di jalan setelah mobil di depan berganti jalur.
Sebagai bagian dari tes, Tesla 3 menunjukkan dirinya dengan sangat baik, hambatan dihindari. Tetapi autopilot mobil-mobil lain tidak berfungsi dengan baik pada tes di jalan biasa - sambil berbaring, dari waktu ke waktu mereka tidak dapat mengenali mobil yang tidak bergerak, yang tiba-tiba muncul di depan lintasan setelah mobil di depan bergerak ke kanan atau kiri. Itulah sebabnya produsen mobil dengan sistem kontrol otomatis juga merekomendasikan agar pengemudi tetap menggunakan setir.
By the way, Model 3 "menabrak" dengan caranya sendiri - mobil sering melambat atau melambat setelah mobil di depan pergi ke jalur lain, dan tidak ada penghalang di depan. Dalam beberapa kasus, situasi muncul karena bayangan di jalan dilemparkan oleh pohon yang berdiri di sebelah jalan. Dari 12 positif palsu dari Autopilot dari kendaraan listrik Tesla 3, tujuh disebabkan oleh alasan ini. Situasi itu sendiri tidak dapat disebut berbahaya, tetapi mungkin pengemudi tidak akan terlalu senang dengan pengereman mobil karena bayangan. Di sisi lain, dalam situasi seperti itu, "positif salah positif" lebih baik, yaitu reaksi mobil terhadap hambatan imajiner daripada "negatif palsu" ketika ada hambatan, tetapi mobil tidak melihatnya.
Juga, lima model robomobiles ini diuji dalam hal kemampuan untuk mematuhi jalur yang dipilih dalam situasi yang berbeda (misalnya, pada tikungan kelengkungan yang berbeda). Dalam seri tes ini, Model 3 berkinerja terbaik. BMW, Volvo dan Mercedes-Benz tidak selalu berhasil.
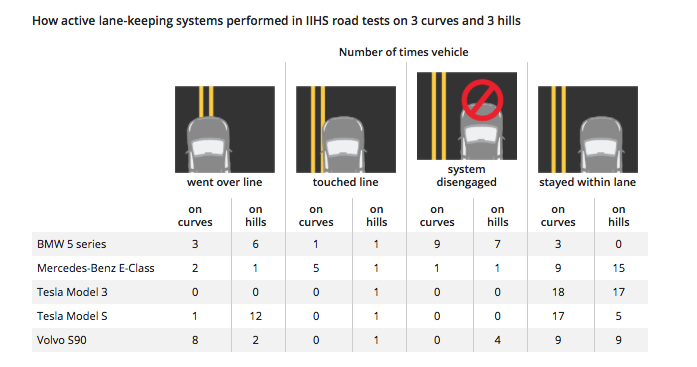
Tabel di atas menunjukkan hasil tes di jalan umum. Ternyata, tidak ada satu pun mobil dengan autopilot, kecuali Tesla 3, yang berhasil lulus semua tes. Hampir setiap “peserta tes” memiliki masalah jenis apa pun. Pada saat yang sama, perwakilan IIHS mengatakan bahwa masih terlalu dini untuk membicarakan peringkat pengguna autopilot, karena untuk ini perlu dilakukan lebih banyak pengujian.
Namun demikian, pabrikan autopilot dan mobil dengan mereka sekarang menjadi semakin banyak, jadi, sejauh yang dapat dinilai, dalam waktu dekat peringkat tersebut akan disusun dan diterbitkan dalam domain publik. Di sisi lain, autopilot masih belum terlalu bagus, sehingga beberapa perusahaan harus "menarik" autopilot mereka.
Autopilots 3, 4 dan 5 level
Semuanya akan segera muncul. Beberapa produsen mengiklankan pengembangan mereka seolah-olah itu sudah sistem autopilot tingkat ketiga atau keempat. Namun faktanya, semua ini jauh dari kasus. Bahkan tingkat kedua, seperti yang kita lihat, memiliki masalah, tidak perlu dikatakan tentang "tahapan evolusi" berikutnya.
Ketika seorang pengemudi atau operator mobil dengan sistem kontrol otomatis mulai menganggap asisten digitalnya sebagai pengemudi independen, timbul masalah. Semua orang sekarang memiliki mobil robot Uber di bibir mereka, salah satunya pada bulan Maret tahun ini
menabrak pengendara sepeda dengan ayunan penuh, yang melintasi jalan di tempat yang salah. Penyelidikan oleh Dewan Keselamatan Transportasi Nasional AS mengungkapkan bahwa masalahnya adalah sistem autopilot, yang tidak mengenali orang tersebut tepat waktu, dan mobil terus mengemudi.
Dalam beberapa kasus, kecelakaan tidak terjadi karena autopilot, tetapi hanya karena tabrakan dalam situasi tertentu tidak dapat dihindari. Ini terjadi dengan romobile Google, yang beberapa tahun lalu
menabrak bus di jalan. Bus melakukan manuver yang salah, dan keadaan tidak memungkinkan autopilot untuk menghindari tabrakan dengannya.

Robot bus juga mengalami kecelakaan, dan juga bukan karena kesalahan autopilot. Salah satu bus ini, model
Navya Arma , secara tak terduga
bertabrakan dengan kendaraan lain untuk penumpangnya - tetapi hanya karena pengemudi kendaraan ini tidak memperhatikan jalan.
Akhirnya, pada Januari tahun ini, mobil listrik Tesla bertabrakan dengan mobil pemadam kebakaran. "Sopir itu mengatakan bahwa Tesla-nya dalam mode autopilot. Yang mengejutkan, pria itu tidak mengalami kerusakan apa pun, ”
kata Tweet
tersebut . Persidangan kemudian berjalan untuk waktu yang lama, dan tampaknya mereka akhirnya tidak tahu siapa yang benar dan siapa yang harus disalahkan.
Bagaimanapun, ada semakin banyak laporan kecelakaan dengan mobil autopilot - tetapi ini bukan karena autopilots semakin bodoh, tetapi karena semakin banyak kendaraan seperti itu. Dan hampir semua ahli mengatakan bahwa “asisten digital” pengemudi, bahkan pada tahap pengembangan saat ini, dapat membuat lalu lintas di jalan lebih aman. Tetapi evolusi sistem seperti itu tidak berhenti, itu terus berlanjut. Kemungkinan besar, dalam 5 tahun kita akan melihat penampilan massal di jalan umum sistem 2 dan 3 tingkat.