Hai Perangkat ini berlaku tidak hanya di PSU komputer, tetapi kami akan membicarakannya sebagai komputer yang mendesak :)
Teknologi proses untuk produksi prosesor terus menurun, seiring dengan itu konsumsi energi juga menurun. Prosesor generasi terbaru mengandung sistem video grafis yang cocok untuk tugas sehari-hari. Jika Anda tidak terlalu menuntut kinerja dalam permainan video, maka untuk anggaran yang relatif sederhana, Anda dapat berpikir tentang komputer yang sunyi yang akan membuat suara hanya di bawah beban berat, yang tidak sering terjadi.
Berikutnya adalah visi saya tentang konfigurasi komputer untuk pendinginan semi-pasif.
Rata-rata CPU pada puncak bebannya menghasilkan panas 65 watt, dapat didinginkan oleh pendingin pabrik dengan daya lebih besar (dari biasanya) 120-150 watt dengan mengatur pengaturan BIOS sehingga mulai berputar hanya ketika 30-40% CPU dimuat atau pada suhu di atas 40 ° C.
Sumber kebisingan lainnya adalah HDD, tetapi sederhana, saya menggantinya dengan SSD.
Ada kipas catu daya yang berputar terus-menerus. Anda dapat membeli yang sepenuhnya pasif atau semi-pasif pada awalnya, tetapi inilah harga pertanyaannya: (dari $ 150) mungkin masuk akal untuk mengarahkan dana ini ke produktivitas yang lebih besar?
Catu daya 500 W biasa ($ 50) memiliki cadangan daya yang besar dalam kasus saya, jadi saya memutuskan untuk mematikan kipas sepenuhnya. Tetapi selama operasi yang berkepanjangan di bawah beban berat, radiator di dalam mulai memanas di atas 60 ° C, sehingga diputuskan untuk mengembalikan kipas tetapi untuk membuat kecepatannya terkontrol.
Catu daya yang berbeda memiliki berbagai fitur desain, mungkin dalam beberapa kasus diperlukan aliran udara yang konstan. Karena itu, sebelum melakukan perubahan pada desain PSU Anda, ketahuilah bahwa Anda memahami prosesnya, Anda memiliki "tangan yang adil" dan bahwa perubahan yang dilakukan tidak akan mempengaruhi pengoperasian PSU Anda dan peralatan terkait. Sering terjadi bahwa PSU memompa udara dari seluruh unit sistem. Modifikasi apa pun dapat merusak komputer Anda!
Dasarnya diambil Arduino nano berdasarkan ATMEGA168PA, dari berbagai proyek orang lain yang disusun sendiri.
Karena sumber daya pengendali memungkinkan, diputuskan untuk membuat indikator LED tiga warna dari tipe LED pintar dengan berbagai kedipan dan warna tergantung pada suhu.

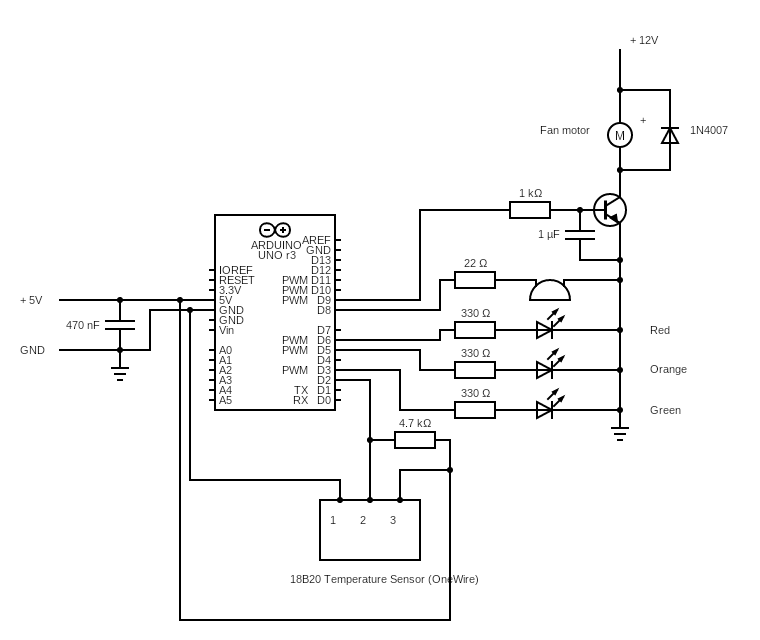
Suhu diukur oleh sensor DS18B20, tergantung pada suhu, kecepatan kipas meningkat atau menurun. Ketika mencapai> 67 ° C, detektor suara diaktifkan. Transistor - NPN apa pun dengan arus> arus kipas Anda. Saya juga mencoba mengendalikan kipas tiga kawat, semuanya berhasil, tetapi tidak dapat membuatnya berhenti sepenuhnya.
Awalnya, ia menggunakan frekuensi PWM default (448,28 Hz), tetapi pada kecepatan rendah pendingin membuat dering yang hampir tidak terlihat, yang sama sekali tidak cocok dengan konsep pendinginan diam. Oleh karena itu, frekuensi perangkat lunak PWM dinaikkan menjadi 25 kHz. Pada putaran terendah, kipas tidak dapat memulai segera, oleh karena itu, selama dua detik pertama, impuls dengan putaran maksimum diterapkan padanya, kemudian putaran sesuai dengan program.
Ini adalah video yang menunjukkan operasi perangkat.
Tapi sebenarnya, sebuah sketsa, saya meminta Anda untuk tidak banyak menendang. Ini adalah sketsa pertama saya untuk Arduina :)
Klik untuk melihat kode.// 2 - DS18x20 data // 3 - green LED (a 330 Ohm resistor is necessary) // 5 - orange LED (a 330 Ohm resistor is necessary) // 6 - red LED (a 330 Ohm resistor is necessary) // 9 - PWM Fan // 8 - Buzzer #include <OneWire.h> byte temp; // temperature of sensor byte greenLED = 3; byte orangeLED = 5; byte redLED = 6; byte FanSpeed = 0; int piezoPin = 8; // byte modes[] = { 0B00000001, // 0B00000101, // 0B00010101, // 0.5 0B01010101, // 0B10101010, // 0B00010101, // 0B01010101 // (4 ) }; uint32_t ms, ms1 = 0, ms2 = 0, ms3 = 0, ms4 = 0, ms5 = 0; uint8_t blink_loop = 0; uint8_t blink_mode = 0; uint8_t modes_count = 0; bool FirstRun = 0; OneWire ds(2); // on pin 10 (a 4.7K resistor is necessary) void analogWrite25k(int pin, int value) { switch (pin) { case 9: OCR1A = value; break; case 10: OCR1B = value; break; default: // no other pin will work break; } } void setup(void) { pinMode(redLED, OUTPUT); pinMode(greenLED, OUTPUT); pinMode(orangeLED, OUTPUT); pinMode(9, OUTPUT); modes_count = 1; blink_mode = modes[modes_count]; TCCR1A = 0; // undo the configuration done by... TCCR1B = 0; // ...the Arduino core library TCNT1 = 0; // reset timer TCCR1A = _BV(COM1A1) // non-inverted PWM on ch. A | _BV(COM1B1) // same on ch; B | _BV(WGM11); // mode 10: ph. correct PWM, TOP = ICR1 TCCR1B = _BV(WGM13) // ditto | _BV(CS10); // prescaler = 1 ICR1 = 200; // TOP = 320 // Serial.begin(9600); } void loop() { byte i; byte present = 0; byte type_s; byte data[12]; byte addr[8]; float celsius; if ( ( ms - ms3 ) > 1000 || ms < ms3 ){ ms3 = ms; if ( !ds.search(addr)) { // Serial.println("No more addresses."); // Serial.println(); ds.reset_search(); if ( ( ms - ms4 ) > 250 || ms < ms4 ){ ms4 = ms; //delay(250); return; } } // Serial.print("ROM ="); for( i = 0; i < 8; i++) { // Serial.write(' '); // Serial.print(addr[i], HEX); } if (OneWire::crc8(addr, 7) != addr[7]) { // Serial.println("CRC is not valid!"); return; } // Serial.println(); // the first ROM byte indicates which chip switch (addr[0]) { case 0x10: Serial.println(" Chip = DS18S20"); // or old DS1820 type_s = 1; break; case 0x28: Serial.println(" Chip = DS18B20"); type_s = 0; break; case 0x22: Serial.println(" Chip = DS1822"); type_s = 0; break; default: Serial.println("Device is not a DS18x20 family device."); return; } ds.reset(); ds.select(addr); ds.write(0x44, 1); // start conversion, with parasite power on at the end } //delay(1000); // maybe 750ms is enough, maybe not // we might do a ds.depower() here, but the reset will take care of it. if ( ( ms - ms2 ) > 900 || ms < ms2 ){ ms2 = ms; present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad for ( i = 0; i < 9; i++) { // we need 9 bytes data[i] = ds.read(); } // Convert the data to actual temperature // because the result is a 16 bit signed integer, it should // be stored to an "int16_t" type, which is always 16 bits // even when compiled on a 32 bit processor. int16_t raw = (data[1] << 8) | data[0]; if (type_s) { raw = raw << 3; // 9 bit resolution default if (data[7] == 0x10) { // "count remain" gives full 12 bit resolution raw = (raw & 0xFFF0) + 12 - data[6]; } } else { byte cfg = (data[4] & 0x60); // at lower res, the low bits are undefined, so let's zero them if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms else if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms else if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms //// default is 12 bit resolution, 750 ms conversion time } celsius = (float)raw / 16.0; temp = celsius; // Serial.println("TEMPERATURE IS:"); // Serial.println(temp); } ms = millis(); // 125 if( ( ms - ms1 ) > 125|| ms < ms1 ){ ms1 = ms; // if ( temp <= 50 ) { digitalWrite(orangeLED, LOW); digitalWrite(redLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(greenLED, HIGH); else digitalWrite(greenLED, LOW); blink_loop++; if ( temp <= 40 ) { blink_mode = modes[0]; analogWrite25k ( 9, 0); FirstRun = 0; } if ( temp >= 41 && temp <= 45 ) { blink_mode = modes[1]; // Make a push impulse for starting fan (1 sec) if ( FirstRun == 0 ) { ms5 = ms; FirstRun = 1; } if (FirstRun == 1 && (2000 > (ms - ms5))) { analogWrite25k ( 9, 33); // Fan start impulse } if (FirstRun == 1 && (2000 < (ms - ms5))) { analogWrite25k ( 9, 28); // first speed } } if ( temp >= 46 && temp <= 50 && FirstRun == 1) { blink_mode = modes[2]; analogWrite25k ( 9, 29); } } if ( temp >= 51 && temp <= 61 ) { digitalWrite(greenLED, LOW); digitalWrite(redLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(orangeLED, HIGH); else digitalWrite(orangeLED, LOW); blink_loop++; if ( temp >= 51 && temp <= 54 ) { blink_mode = modes[0]; analogWrite25k ( 9, 30); } else if ( temp >= 55 && temp <= 58 ) { blink_mode = modes[1]; analogWrite25k ( 9, 31); } else if ( temp >= 59 && temp <= 61) { blink_mode = modes[2]; analogWrite25k ( 9, 32); } } if ( temp >= 62 && temp <= 120 ) { digitalWrite(greenLED, LOW); digitalWrite(orangeLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(redLED, HIGH); else digitalWrite(redLED, LOW); blink_loop++; if ( temp >= 62 && temp <= 66 ) { blink_mode = modes[0]; analogWrite25k ( 9, 33); } if ( temp >= 67 && temp <= 70 ) { blink_mode = modes[1]; analogWrite25k ( 9, 34); } if ( temp >= 71 && temp <= 120) { blink_mode = modes[2]; analogWrite25k ( 9, 50); tone(piezoPin, 2500, 30); } } } }