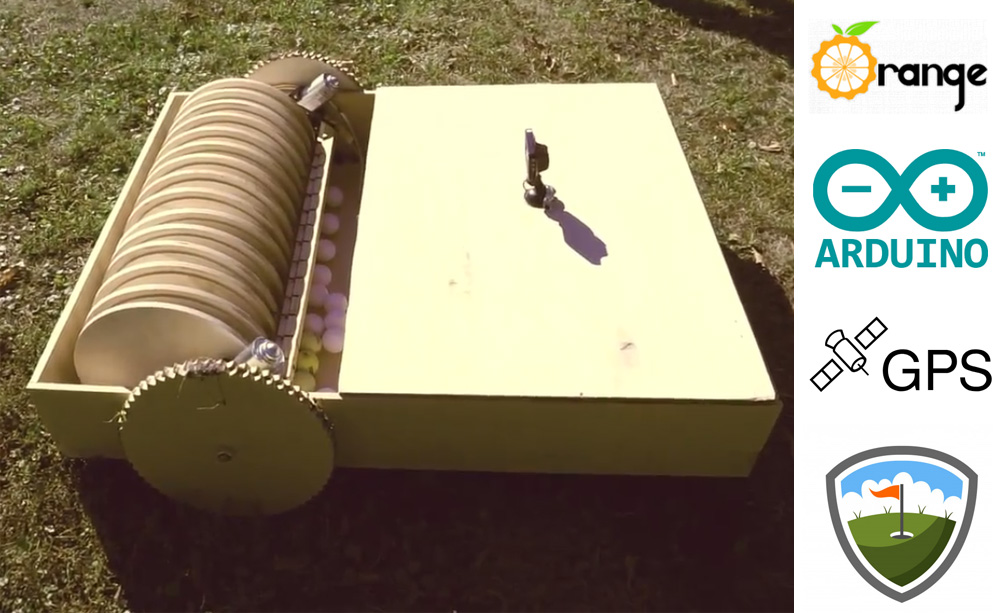
Proses pengembangan robot layanan pada Orangepi zero dan arduino untuk mengumpulkan bola golf. Semua rasa sakit pengembang indie, tidak terbebani dengan latar belakang teknis dalam satu pos ...
Pengembangan MVP. Menguji video.
Apa itu golf?
Golf adalah permainan olahraga. Tujuan utamanya adalah untuk menggulirkan bola ke dalam lubang di setiap bidang untuk pukulan yang lebih sedikit, untuk melewati semua bidang dengan pukulan yang lebih sedikit. Di negara kita, golf sangat tidak berkembang dan itu menyedihkan. Permainan ini cukup menarik, memungkinkan orang untuk menghabiskan waktu di luar rumah, berkomunikasi selama permainan, cocok untuk segala usia. Gim ini memiliki ukuran yang jelas tentang keberhasilan handicap Anda - indikator numerik kualifikasi atlet. Semua faktor ini menjadikan golf kegiatan streaming. Jika Anda belum mencoba golf - saatnya!

Apa itu driving range?
Untuk menyerang dari pertama kali ke ujung lapangan, lebih dekat ke lubang, Anda harus bisa melakukan serangan yang panjang dan akurat. Driving Range adalah lapangan latihan untuk berlatih pukulan golf panjang dan menengah. Bidang-bidang ini terlihat seperti ini.

Saya di driving range. Ini adalah ilustrasi cara menyerang yang salah.

Dalam satu sesi latihan di bidang seperti itu mereka biasanya menghasilkan lebih dari seratus hit. Tangan untuk mengumpulkan bola-bola ini sangat melelahkan dan mengancam jiwa. Pada awal abad ke-20 tidak ada banyak pilihan, tetapi di beberapa tempat kerja manual lebih murah sekarang.

Alat tangan masih digunakan, tetapi ini agak pengecualian.
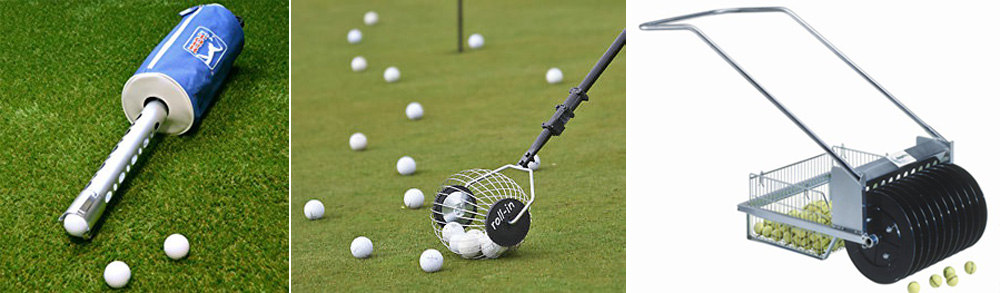
Paling sering, bola dikumpulkan menggunakan halangan khusus pada traktor, kereta golf atau mobil biasa.

Untuk mengumpulkan bola, seret mereka ke mesin cuci, memuat ke dalam dispenser biasanya orang khusus di negara bagian, meskipun penjaga rumput juga bisa memainkan peran ini. (Graskipper adalah orang yang bertanggung jawab atas kualitas halaman rumput di lapangan golf).
Pengembangan dan implementasi robot servis untuk mengumpulkan bola golf tampaknya merupakan langkah yang masuk akal dari sudut pandang ekonomi, karena menghemat pemeliharaan peralatan khusus dan gaji karyawan yang seharusnya melakukan proses ini. Golf dikembangkan di seluruh dunia, foto ini jelas menunjukkan ini.
Game ini tersebar luas di AS dan Eropa, di mana tingkat gaji cukup tinggi dan kemampuan untuk mengganti karyawan dengan robot layanan terbayar dengan sangat cepat.
Menemukan solusi
Sebagai hasil pencarian ditemukan:
beberapa proyek DIY

beberapa rendering yang indah
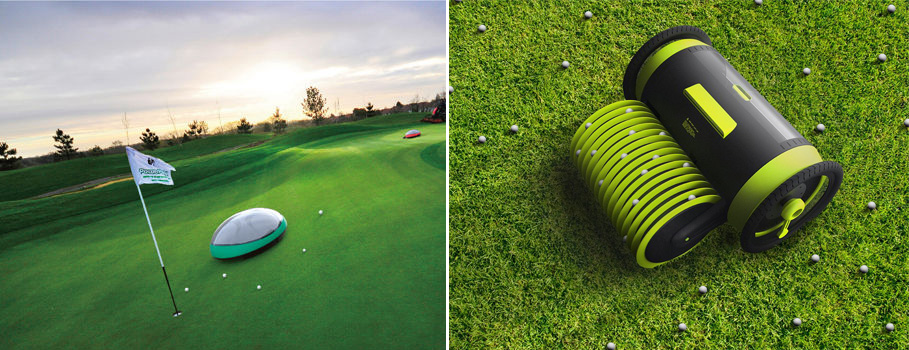
dan satu proyek komersial

Dari sini kita dapat menyimpulkan bahwa ada minat. Kemungkinan besar sangat berisiko untuk berinvestasi dalam solusi niche tersebut. Biaya pengembangan dan penyesuaian produksi tinggi, beberapa cetakan akan datang dalam beberapa puluhan ribu $. Ada lebih dari 40 klub golf di Rusia, sementara ada banyak di dunia, di Jerman saja ada lebih dari 700, dan total lebih dari 34.000. Robot pemetik bola sebagai produk pasti tidak akan lulus ujian sikat gigi di Good Corporation.
Sangat aneh bahwa administrasi beberapa klub golf Eropa yang saya ajak bicara tidak mendengar tentang keberadaan robot yang sudah jadi, meskipun mereka menunjukkan minat. Semua upaya saya untuk menghubungi perusahaan ini tidak berhasil, mungkin mereka tidak dapat mengatasi jumlah pesanan yang ada.
Saya tidak tahu persis apa yang akan terjadi. Mungkin di suatu tempat dalam perjalanan dari kotak kayu lapis ke sampel "dewasa" pertama, pemahaman akan datang apakah seseorang membutuhkannya atau tidak.
Tujuan awalnya adalah untuk mendapatkan sampel yang berfungsi tanpa memperhatikan penampilan. Selanjutnya, saya berencana untuk memberikan robot penampilan yang rapi dan meletakkannya untuk pengujian di klub golf di Rusia. Setelah debugging dan melakukan tes jangka panjang, lanjutkan dengan memproses model menjadi model yang cocok untuk produksi.
Ayo pergi!
Beberapa manfaat utama direncanakan relatif terhadap solusi komersial yang ada.
- Tidak perlu mengubur kabel arus rendah di sekeliling.
- Kemungkinan implementasi dalam infrastruktur yang ada.
- Biaya lebih rendah dan total biaya kepemilikan.
Kasing dan bagian mekanis
Bahan untuk tubuh sampel pertama dipilih kayu lapis. Murah, memungkinkan Anda untuk dengan cepat memotong beberapa bagian di tempat atau mengebor lubang. Agar semuanya jelas disesuaikan, saya membuat sketsa gambar dan memberikannya pada penggilingan pemotongan.

Mengumpulkan semua detail. Sejak awal ada ide untuk membuat tubuh bulat, tetapi memutuskan untuk berhenti secara ketat pada MVP. Apa pun yang tidak memengaruhi kinerja sengaja dikecualikan dari daftar todo.

Mekanisme untuk menangkap bola selama evolusi perangkat ini telah menunjukkan efektivitasnya, oleh karena itu, opsi lain belum dipertimbangkan.
Mesin 12V 30 N / m. di setiap roda. Mesin yang sama memutar poros dengan cakram yang mencengkeram, karena mereka dinaikkan di atas permukaan untuk berinvestasi secara bergantian dan meningkatkan kemampuan manuver.

Awalnya, mesinnya bukan Cina. Tidak ada momen dalam uraian, jadi risikonya besar. Momen itu jelas tidak cukup, yang tidak bisa dikatakan tentang mesin dari windows.
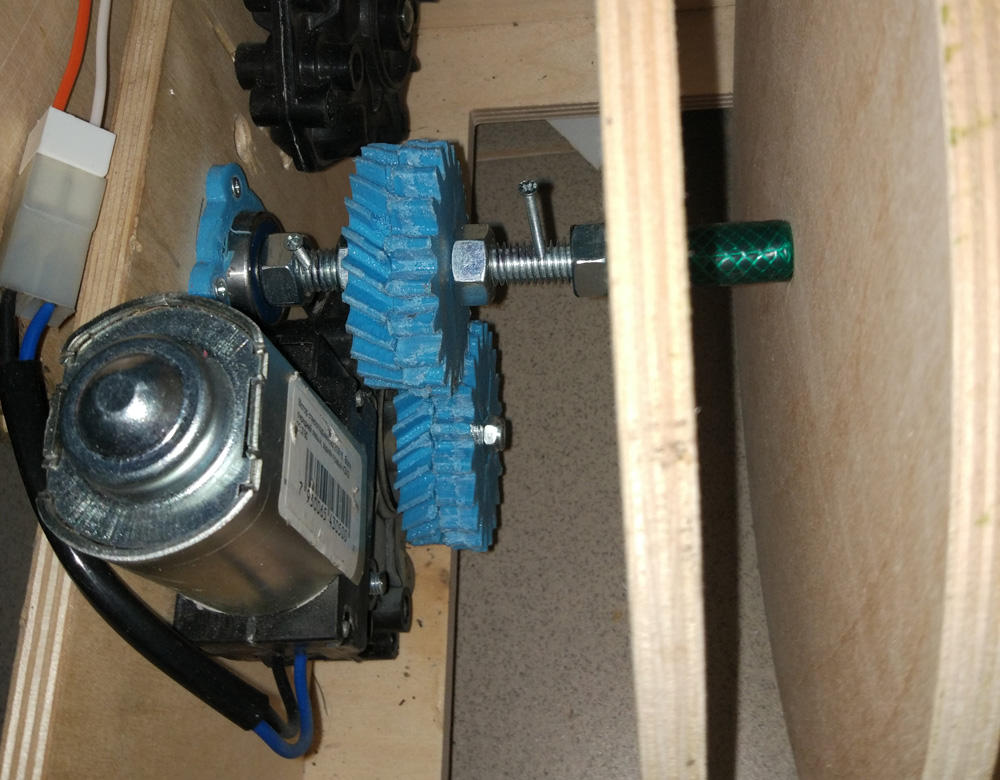
Setelah mengganti mesin, roda gigi lain harus dicetak.
Elektronik
Karena bajak harus bekerja tanpa kabel elektromagnetik di sepanjang kontur lapangan, entah bagaimana perlu menavigasi dan mencari basis untuk menjatuhkan bola dan mengisi ulang.
Saya memutuskan untuk menggunakan Orangepi lite dan arduino untuk pekerjaan yang lebih nyaman dengan 5v tanpa konverter tingkat kebun binatang untuk setiap sensor dan driver mesin.
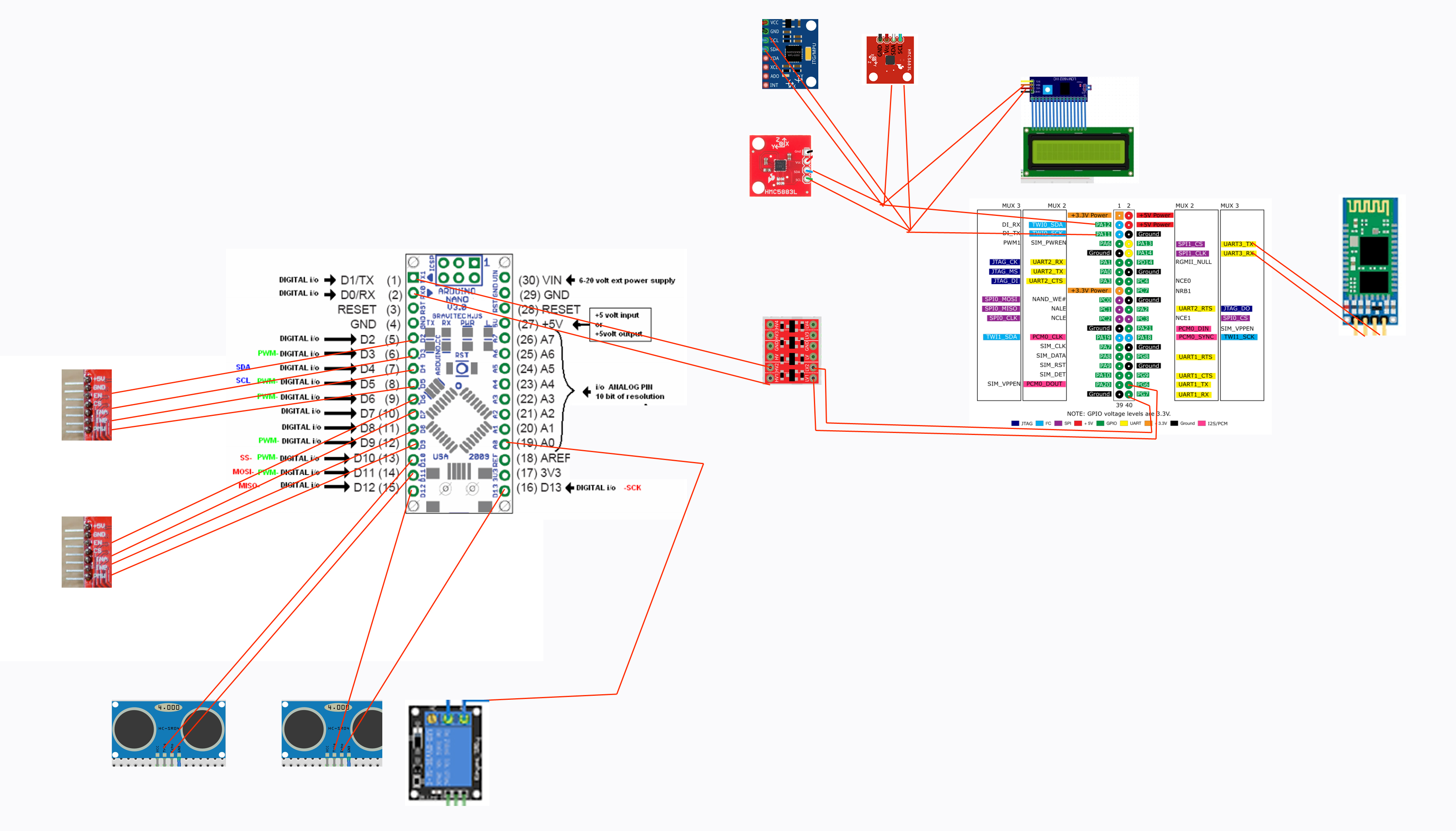
Rakitan semua modul jadi di papan tempat memotong roti. Ini mempengaruhi kurangnya pengalaman dalam sirkuit, saya pikir di masa depan itu tidak akan menjadi masalah untuk memisahkan papan untuk modul atau untuk elemen diskrit dan memesannya.

Skema ini terdiri dari 11 rencana, 11 Karl!
- Oranye Pi Lite
- Arduino nano
- Modul GPS GY-NEO6MV2
- 2 driver mesin VNH2SP30
- Bluetoth Hc-06
- 2 modul ultrasonik J34
- Pengonversi Level Logika
- Modul giroskop 3-sumbu dan akselerometer GY-521 MPU-6050
- Blok dua relay
Tentu saja, ini dilakukan untuk pemasangan cepat, pemasangan dan penggantian modul.
Bagian perangkat lunak
Script utama ditulis dengan Python. Ada tujuan global dalam siklus program:
- Inisialisasi
- Mengumpulkan bola
- Kembali ke markas
- Pengisian daya
- Liburan Terjadwal
- Beristirahatlah pada kondisi cuaca.
Inisialisasi
Selama inisialisasi, sistem diuji, GPS dicari, peta lintas negara lokal dibangun, dan tujuan lebih lanjut ditentukan.
Mengumpulkan bola
Selama pengumpulan bola di setiap siklus, perbarui peta medan lokal, buat vektor ke target geografis saat ini, polling sensor kepadatan penuh dengan bola, polling baterai.
Kembali ke markas
Jika terjadi limpahan kompartemen untuk pedang atau kehabisan baterai, robot mengalihkan target global untuk kembali ke pangkalan dengan rute terpendek. Dengan jarak yang dekat dengan koordinat dasar, pencarian visual untuk tanda dilakukan di mana orientasi lebih lanjut dan lebih akurat terjadi.
Pengisian daya, istirahat
Pengisian berlangsung sampai tegangan baterai yang diperlukan. Istirahat dapat dijadwalkan sesuai jadwal atau dengan memicu sensor hujan.
Perumahan

Terima kasih banyak untuk desain
habr.com/users/NikitaKhvorykBadan pendukung harus ditutup dari atas dengan bagian atas, yang berfungsi melindungi dari hujan dan bola yang jatuh. Kasing dekoratif pertama yang saya rencanakan untuk dibuat dari fiberglass dan epoksi. Saya siap menulis pos terpisah tentang hal itu, jika menarik.

Video
Paket
Sudah, rover mengumpulkan 95-100% dari tujuan yang dilaluinya. Buat rute di dalam poligon menggunakan koordinat GPS. Rencananya:
- Menemukan basis untuk menjatuhkan bola dan mengisi daya pada tanda visual.
- Reset bola servo.
- Sensor balon meluap.
- WEB-interface untuk indikasi visual dari titik-titik di peta, konstruksi zona untuk mengumpulkan bola dengan interval yang berbeda.
- Tubuh
- Penempatan robot di sebuah klub golf di Moskow untuk ujian dalam kondisi pertempuran.
Pertanyaan
Banyak kali setelah posting saya terima dari komunitas-habro jawaban atas pertanyaan atau saran yang banyak membantu. Sepanjang posting ada beberapa pertanyaan yang saya benar-benar perlu dijawab. Saya memutuskan untuk menyatukan mereka untuk kenyamanan.
- Bagaimana cara membuat tubuh untuk robot? Seharusnya terlihat cantik, tanpa investasi cetakan.
- Apakah layak untuk menjauh dari modul dan melakukan semuanya dalam satu papan? Apa yang harus dilakukan dengan komputer mikro?
- Bagaimana cara mencari pembiayaan untuk suatu proyek? Di mana menguji sampel?
- Saya tidak bisa menemukan contoh filter Kalman untuk data GPS dengan koreksi oleh magnetometer, giroskop. Ada Pycalman, tapi saya tidak mengerti bagaimana memasukkan data dari sensor ke dalam matriks. Bahkan pada pemanggang tidak menemukan jawabannya. Saya akan sangat berterima kasih.
Terima kasih atas perhatian anda Di pos berikutnya, tes dalam kondisi pertempuran. Saya akan menunjukkan kepada Anda apa yang tidak ditampilkan, saya akan mencoba untuk memecahkan yang belum terpecahkan, dan mencari tahu semua yang tidak diketahui!
Selalu milik Anda, startup pemula,
pengelola tautan tengah , pengembang semua jenis robot
1 ,
2 ,
3 ,
4 ,
5 ,
6 dan gadget
1 ,
2 ,
3 . Dan saya menulis dua cerita
1 ,
2 dan mengambil beberapa wawancara
1 ,
2 ,
3 .
Saya terbuka untuk dialog, saran, bantuan, saran.